







 该文指导如何下载.bag文件并利用ROS进行处理。首先启动roscore,然后用rosbaginfo命令查看文件信息。接着,在rviz中配置显示点云数据,设定FixedFrame为livox_frame,Topic为/livox/lidar,Style为Points。最后,通过rosbagplay命令播放bag文件,以观察lidar数据。
该文指导如何下载.bag文件并利用ROS进行处理。首先启动roscore,然后用rosbaginfo命令查看文件信息。接着,在rviz中配置显示点云数据,设定FixedFrame为livox_frame,Topic为/livox/lidar,Style为Points。最后,通过rosbagplay命令播放bag文件,以观察lidar数据。
一、首先可以在这个网站中下载.bag文件用于学习。
二、显示.bag文件信息
在终端1中启动:
roscore在终端2中输入:
rosbag info <bag_file_name>这里要把<bag_file_name>换成你自己的bag文件名字,之后在终端就会显示出bag文件的信息。

三、打开Rviz并播放bag格式的文件
1. 在终端打开rviz:
rosrun rviz rviz
出现rviz界面:
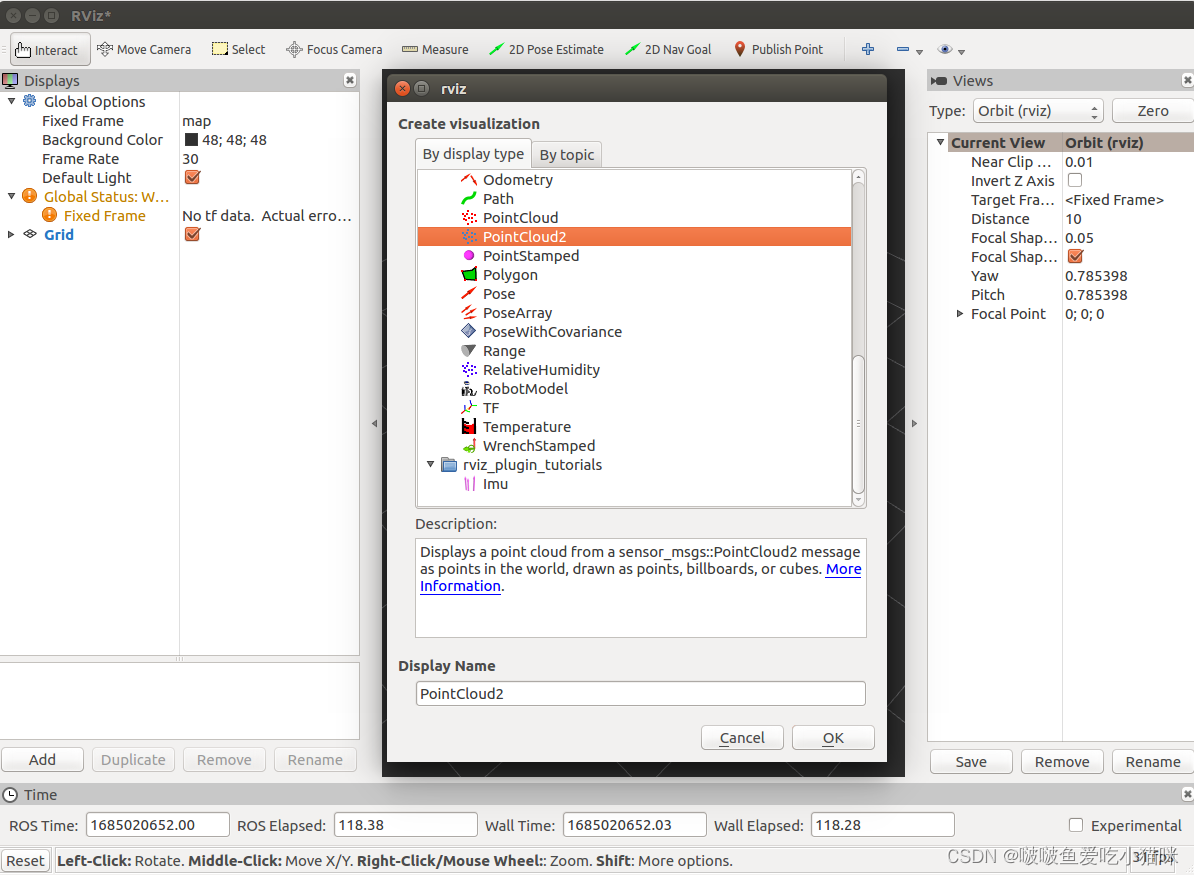
2.配置rviz
点击左下角“Add”按钮——>点击“By display type”——>点击“PointCloud2”——>点击“ok”
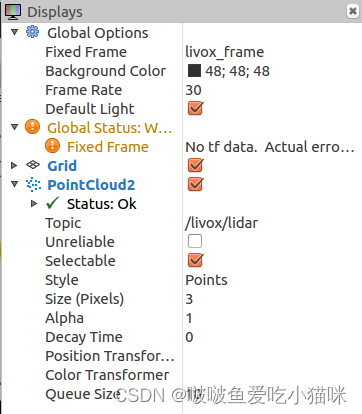
在左侧栏目中
- 将Global Options下的Fixed Frame一栏右边的参数改成livox_frame
- 将PointCloud2下的Topic一栏右边的参数改成/livox/lidar
- 将PointCloud2下的Style一栏右边的参数选为Points
3.播放bag文件
在终端中输入
rosbag play <bag_file_name>.bag 可以看到bag文件正在运行。
可以看到bag文件正在运行。


















 1676
1676

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











