







本文包含以下内容:
一、典型二阶系统传递函数介绍
二、极点位置变化对阶跃响应的影响
一、典型二阶系统传递函数介绍
典型二阶系统的传递函数如下:
H
(
s
)
=
ω
n
2
s
2
+
2
ζ
∗
ω
n
∗
s
+
ω
n
2
\ H(s)= \frac{ωn^2 }{s^2 +2ζ*ωn*s+ωn^2}
H(s)=s2+2ζ∗ωn∗s+ωn2ωn2
特征方程为:
s
2
+
2
ζ
∗
ω
n
∗
s
+
ω
n
2
=
0
\ {s^2 +2ζ*ωn*s+ωn^2}=0
s2+2ζ∗ωn∗s+ωn2=0
欠阻尼状态下的特征根为:
s
1
,
2
=
−
ζ
∗
ω
n
±
j
w
n
∗
1
−
ζ
2
(
0
<
ζ
<
1
)
\mathop{{s}} \nolimits_{{1,2}} = {-ζ*ωn \pm j wn*\sqrt{1-ζ^2}}(0<ζ<1)
s1,2=−ζ∗ωn±jwn∗1−ζ2(0<ζ<1)
二、极点位置变化对阶跃响应的影响
动态特性指标与特征根的关系:
t
p
=
π
∣
I
m
∣
σ
=
e
π
∗
R
e
∣
I
m
∣
t
s
=
3.5
∣
R
e
∣
(
包
络
线
正
负
百
分
5
)
\ tp = \frac {π}{|Im|}\\ \ σ = e^\frac {π*Re}{|Im|}\\ \ ts = \frac {3.5}{|Re|}(包络线正负百分5)
tp=∣Im∣π σ=e∣Im∣π∗Re ts=∣Re∣3.5(包络线正负百分5)
按如下值对极点进行移动:

用matlab绘制出三条响应曲线观察:
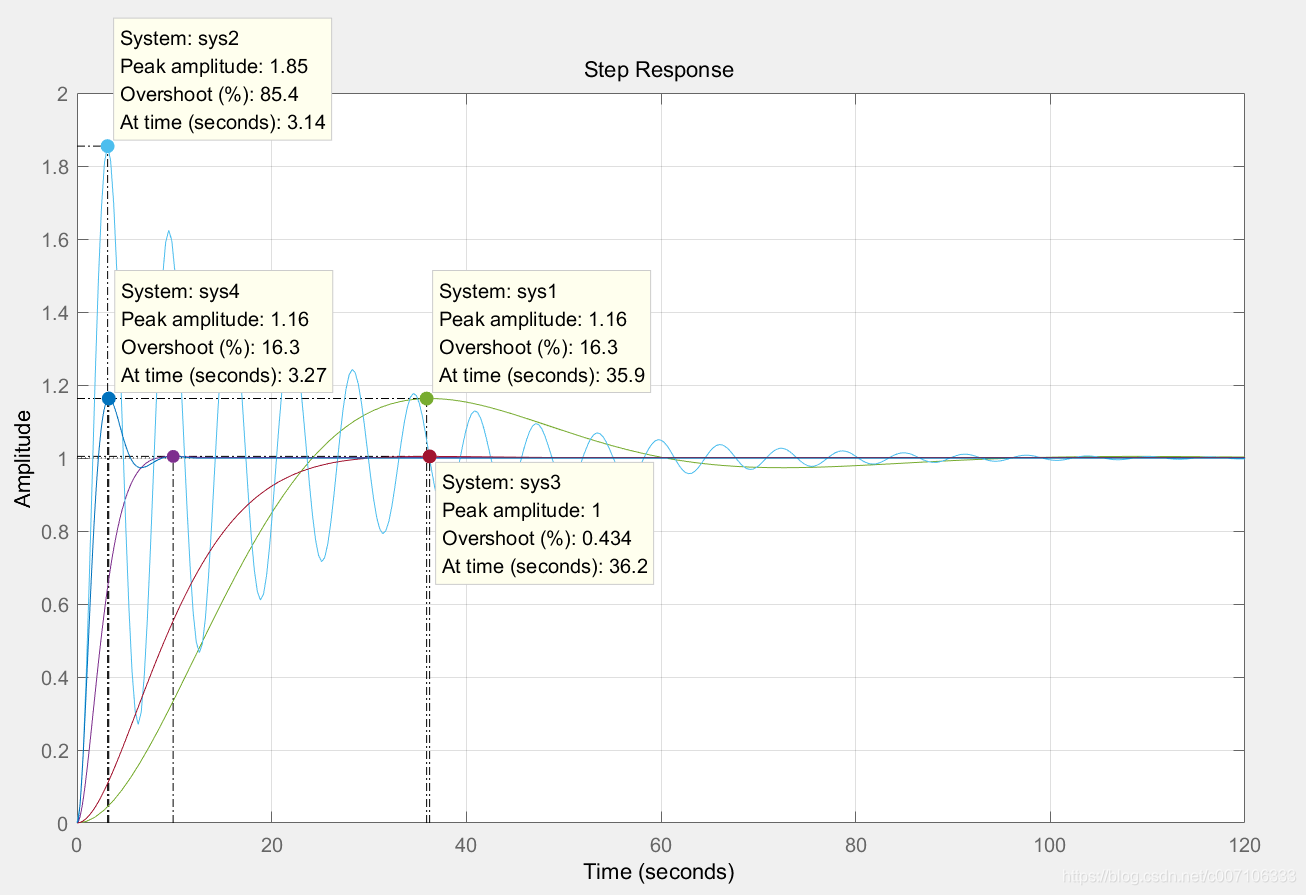
上移sys1的极点得到sys2,tp较小,超调量变大,稳定时间基本不变;
左移sys1的极点得到sys3,tp不变,超调量变小,稳定时间变短;
同时上移左移sys1极点但不改变‘相角’,tp变小,超调量不变,稳点时间变短;

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









