








在现代导航系统中,惯性测量单元(IMU)与全球定位系统(GPS)的数据融合技术正日益受到重视。随着无人驾驶、航空航天、智能交通等领域的快速发展,对高精度定位和导航的需求愈发迫切。本文旨在推荐“IMU与GPS数据融合”作为研究课题,探讨其研究价值及应用前景。
IMU与GPS的基本概念
惯性测量单元(IMU)
IMU是一种能够测量物体加速度和角速度的设备,通常由加速度计和陀螺仪组成。IMU能够提供短时间内的高频率数据,适用于快速动态环境下的定位与姿态估计。
全球定位系统(GPS)
GPS是一种基于卫星的定位系统,能够提供全球范围内的位置信息。尽管GPS在大多数情况下表现优异,但在城市峡谷、隧道等环境中易受到信号遮挡,导致定位精度下降。
数据融合的必要性
IMU与GPS各自具有优缺点,IMU的高频率数据可以在短时间内提供位置信息,而GPS则提供长期的绝对位置参考。通过融合两者的数据,可以实现:
- 提高定位精度:IMU在短时间内的高频率更新与GPS的长期稳定性可以互为补充,降低误差。
- 增强抗干扰能力:在GPS信号弱或丢失的情况下,IMU可以继续提供位置信息,确保系统的连续性。
- 实时性强:数据融合算法可以实时计算出更为准确的位置信息,适应动态变化的环境。
课题研究内容
本科生在进行“IMU与GPS数据融合”课题时,可以从以下几个方面入手:
- 数据采集:使用IMU和GPS模块进行数据采集,了解设备的基本使用和数据格式。
- 系统设计:设计一个基于IMU和GPS的数据融合系统,具体包括:
- 硬件选择:选择适合的IMU和GPS模块,考虑其精度、响应速度和兼容性。
- 软件开发:开发数据处理和融合算法的程序,使用Python或C++等编程语言实现。
- 算法研究:探索常见的数据融合算法,如卡尔曼滤波、扩展卡尔曼滤波(EKF)和粒子滤波等,理解其原理及实现。
- 性能分析:通过实验比较不同算法在不同环境下的性能,评估各自的优缺点。
- 系统测试与优化:进行实地测试,收集不同场景下的定位数据,分析融合系统的实际表现并进行优化。
算法性能分析
在进行数据融合时,卡尔曼滤波(Kalman Filter)作为常见的估计方法,其性能分析尤为重要。以下是一些关键点:
- 状态估计精度:通过卡尔曼滤波,可以有效地降低IMU和GPS数据的噪声,提高定位精度。可以使用均方根误差(RMSE)等指标评价估计精度。
- 实时性:卡尔曼滤波具有较好的实时性,适合动态系统。需评估其在不同频率下的响应能力。
- 适用场景:分析在开阔地带、城市环境和室内等不同场景下,卡尔曼滤波与其他算法(如粒子滤波)的表现差异。
可能的创新点
在“IMU与GPS数据融合”课题中,学生可以探索以下创新点:
- 自适应滤波算法:设计自适应卡尔曼滤波器,能够根据环境变化动态调整滤波参数,提高在复杂环境下的性能。
- 深度学习结合:利用深度学习方法对IMU和GPS数据进行特征提取,进而提高融合算法的准确性和鲁棒性。
- 多传感器融合:除了IMU和GPS,还可以引入其他传感器(如LiDAR、视觉传感器等),研究多源数据的融合方法。
- 实时系统优化:开发高效的算法和数据处理流程,以实现更低延迟和更高实时性的定位系统,适应快速移动的应用场景。
- 环境适应性:研究不同环境条件(如城市、高速公路、隧道等)下的定位策略,提出针对性的优化方案。
MATLAB例程
例程
clc;
clear all;
close all;
% 初始化状态
dt = 1; % 时间间隔
A = [1 dt; 0 1]; % 状态转移矩阵
H = [1 0]; % 观测矩阵
% 初始状态
x = [0; 0]; % 初始位置和速度
P = eye(2); % 初始协方差矩阵
% 噪声协方差
Q = [1 0; 0 1]; % 过程噪声
R = 1; % 测量噪声
% 模拟GPS和IMU数据
num_steps = 100; % 数据步数
gps_data = linspace(0, 100, num_steps) + randn(1, num_steps); % GPS数据(加上随机噪声)
imu_data = linspace(0, 100, num_steps); % IMU数据(假设为真实位置)
% 存储估计值
estimates = zeros(2, num_steps);
for k = 1:num_steps
% 卡尔曼预测
x = A * x; % 预测状态
P = A * P * A' + Q; % 预测协方差
% 卡尔曼更新
z = gps_data(k); % 获取GPS观测值
y = z - H * x; % 观测残差
S = H * P * H' + R; % 残差协方差
K = P * H' / S; % 卡尔曼增益
x = x + K * y; % 更新状态
P = (eye(2) - K * H) * P; % 更新协方差
% 存储估计值
estimates(:, k) = x;
end
% 绘图
figure;
plot(gps_data, 'r', 'DisplayName', 'GPS数据');
hold on;
plot(imu_data, 'b', 'DisplayName', 'IMU数据');
plot(estimates(1, :), 'g', 'DisplayName', '卡尔曼滤波估计');
legend;
xlabel('时间步数');
ylabel('位置');
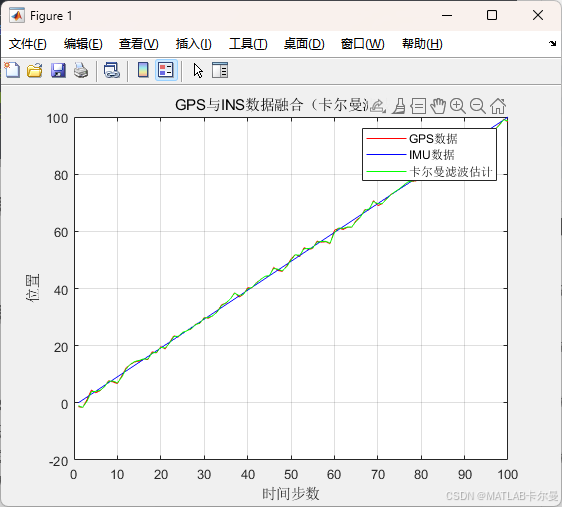
title('GPS与INS数据融合(卡尔曼滤波)');
grid on;
运行结果
结论
IMU与GPS数据融合不仅是一个前沿的研究课题,还具备广泛的应用前景。通过这个课题的研究,学生可以掌握信号处理、控制理论和嵌入式系统等多领域的知识,培养解决实际工程问题的能力。我们期待更多的本科生能够参与到这一激动人心的研究中,为未来的导航技术发展贡献自己的力量。
如需帮助,或有导航、定位滤波相关的代码定制需求,请点击下方卡片联系作者


















 843
843

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











