







本文所述的代码实现了三维空间内目标的高精度定位,结合到达角(AOA) 和到达时间(TOA) 两种测量方法,通过4个基站的协同观测,利用最小二乘法解算目标位置。代码支持噪声模拟、误差分析及三维可视化
代码介绍
算法原理
-
信号建模:
- AOA测量:计算目标与各基站的方位角(
azimuth_angles)和俯仰角(elevation_angles,三维空间才有此项),并添加高斯噪声(noise)。 - TOA测量:基于光速(
3e8 m/s)将传播时间转换为距离,加入时间噪声(TOA_noise)。
- AOA测量:计算目标与各基站的方位角(
-
混合定位解算:
- 单位向量构建:根据AOA角度构造三维单位向量矩阵
A,结合TOA距离向量b,构建线性方程组。 - 最小二乘求解:通过伪逆(
pinv)求解超定方程,分别得到纯AOA估计(estimated_positions_AOA1)和AOA-TOA混合估计(estimated_positions_AOA2)。
- 单位向量构建:根据AOA角度构造三维单位向量矩阵
技术亮点
- 三维适应性:支持三维空间坐标解算,通过俯仰角与方位角联合建模,突破传统二维定位限制。
- 噪声鲁棒性:
- AOA角度噪声默认
1e-1 rad,TOA时间噪声1e-8 s,模拟实际测量误差。 在代码中可随意修改 - 通过最小二乘法抑制噪声对定位精度的影响。
- AOA角度噪声默认
- 多方法对比:同时输出纯AOA与混合定位结果,便于性能对比分析。
代码结构
-
初始化:
stations_position = 100*randn(num_station,3); % 随机生成4个基站的3D坐标 position = 10*randn(1,3); % 生成目标点坐标- 基站与目标位置均随机生成,模拟动态场景。
-
信号模拟与解算:
- 计算真实距离
true_distances,添加噪声后构建观测方程。 - 通过单位向量矩阵
H和伪逆求解目标坐标,支持两种解算方法对比。
- 计算真实距离
-
可视化与输出:
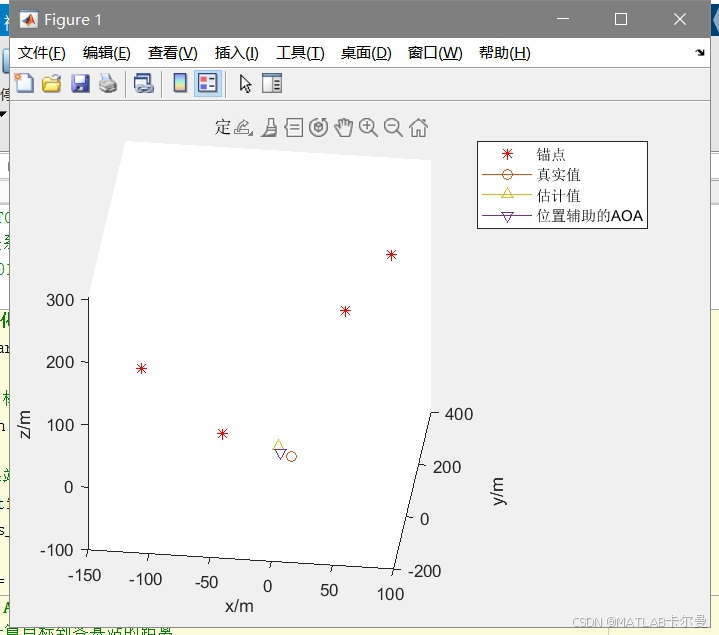
- 绘制三维空间中的基站(红色*)、真实位置(蓝色○)及两种估计结果(▲/▼)。 详见后面的运行结果示意图
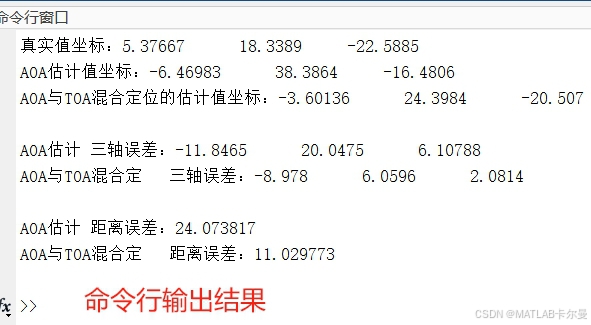
- 输出三轴误差(X/Y/Z)和欧氏距离误差,量化定位精度。
推荐的应用场景
- 无人机导航:三维空间内的精准轨迹追踪。
- 室内定位:复杂建筑结构中的设备定位。
- 工业监测:移动机器人或AGV小车的实时位置监控。
扩展建议
- 动态目标追踪:集成卡尔曼滤波(如EKF)优化运动轨迹。 参考:【MATLAB例程】AOA(到达角度)与TOA(到达时间)混合定位方法,在三维空间下的运动轨迹定位和滤波,滤波使用CKF,附完整源代码
运行结果
运行结果:
命令行输出截图:
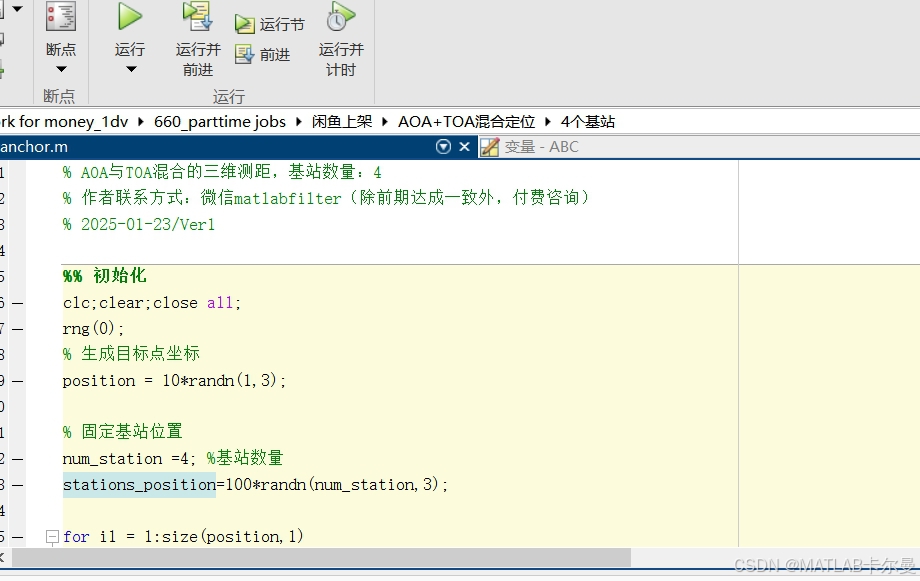
部分代码截图:
MATLAB例程
完整的MATLAB代码如下,粘贴到MATLAB空脚本后即可直接运行:
% AOA与TOA混合的三维测距,基站数量:4
% 2025-01-23/Ver1
%% 初始化
clc;clear;close all;
rng(0);
% 生成目标点坐标
position = 10*randn(1,3);
% 固定基站位置
num_station =4; %基站数量
stations_position=100*randn(num_station,3);
for i1 = 1:size(position,1)
%% 定位
% 计算目标到各基站的距离
num_station = size(stations_position, 1);
true_distances = vecnorm(stations_position - position, 2, 2);
% 模拟接收到的AOA角度信息
azimuth_angles = ...;
elevation_angles = ...;
CSDN原创文章
完整可运行的代码下载链接:https://download.csdn.net/download/callmeup/90647984
如需帮助,或有导航、定位滤波相关的代码定制需求,请点击下方卡片联系作者


















 226
226

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











