








目录
一、理论基础
1.1 四旋翼飞行器的动力学建模
四旋翼飞行器由于其飞行动力来自四个相互独立的电机,因此四旋翼飞行器也被称为四轴飞行器。通过四个电机可以快速实现四旋翼飞行器的起降,任意高度的控制悬停,翻滚飞行以及小曲率转弯等飞行功能。图2-1给出了四旋翼飞行器的实物图和数学模型简化图。
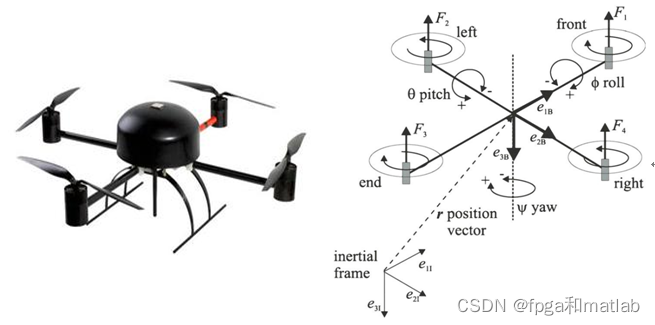
从图的结构示意图可知,四旋翼飞行器的四个电机为十字型等间隔分布。其中第一个电机和第三个电机选择方向为顺时针旋转,第二个电机和第四个电机选择方向为逆时针旋转。通过这四个电机可以给四旋翼飞行器产生四个上升动力,此外也可以通过改变四个电机的旋转速度,使得无人机产生各种不同的飞行动作。如果要保证四旋翼飞行器的飞行状态为悬停状态,那么只要保证四个电机的选择速度相同,且保证四个电机产生的动力和飞行器自身的重力相同就可以实现;如果四个电机产生的动力大于飞行器自身的重量,那么飞行器将上升;如果四个电机产生的动力小于飞行器自身的重量,那么飞行器将下降。如果其中2个电机产生的动力较大,2个电机产生的动力较小,

 订阅专栏 解锁全文
订阅专栏 解锁全文
















 2076
2076











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











