







 本文介绍一篇两阶段的3D目标检测网络:
本文介绍一篇两阶段的3D目标检测网络:Voxel R-CNN,论文已收录于AAAI 2021。 这里重点是理解本文提出的 Voxel RoI pooling。
论文链接为:https://arxiv.org/pdf/2012.15712.pdf
项目链接为:https://github.com/djiajunustc/Voxel-R-CNN
0. Abstract
这里先给出本文摘要:
3D目标检测的最新进展在很大程度上取决于如何表示3D数据,即基于体素(voxel-based)或基于点(point-based)的表示。 许多现有的高性能3D检测器都是基于点的表示,因为这种结构可以更好地保留点的精确位置。 尽管如此,由于点云的无序存储,往往会导致很高的计算开销。 相反,基于体素的结构更适合于特征提取,但由于输入数据被划分成网格,往往会产生较低的精度。
在本文中,作者提出了一个稍微不同的观点,作者发现:对原始点的精确定位对于高性能的3D目标检测来说并不是必不可少的,粗体素粒度也可以达到很高的检测精度。 考虑到这一点,作者设计了一个简单但有效的基于体素的目标检测网络,即Voxel R-CNN。通过在两阶段方法中充分利用体素特征,最终获得了与最先进的基于点的模型(PV-RCNN)相当的检测精度,但计算开销减少了许多。Voxel R-CNN由3D主干网络、2D鸟瞰网RPN以及检测头组成。作者在本文中设计了一个voxel RoI pooling,可直接从体素特征中提取RoI特征,以便进一步处理。在KITTI数据集和Waymo数据集上的实验结果表明,与现有的基于体素的方法相比,Voxel R-CNN在保持实时帧处理速率的同时(即在NVIDIA RTX 2080Ti GPU上以25FPS的速度)提供了更高的检测精度。
1. Introduction & Reflection on 3D Object Detection
( 本文的引言部分和第二部分对3D目标检测的思考部分这里就不详细介绍了,大家可以查看原文,我在这里大致总结下。)
首先是引言部分,现在的3D目标检测大致可以分为两类:基于体素(voxel-based)的检测方法有VoxelNet,SECOND,PointPillars,基于原始点的(point-based)检测方法有STD,PointRCNN,3DSSD,PV-RCNN。从检测性能来看,基于点的检测精度更高,相应地计算效率还不是很快。随着检测算法的日益成熟,现在有一个新的问题出现了:我们是否能设计一个算法,既能达到基于点检测的高精度又能实现基于体素检测一样高的效率?
下面作者在文中回顾了SECOND和PV-RCNN两类检测算法,可以看到SECOND和PV-RCNN在检测精度上有着很大的差距。两个检测算法的主要差异在于:
SECOND是一阶段检测算法,PV-RCNN是两阶段检测算法,PV-RCNN使用了检测头进行检测的进一步优化。PV-RCCN中的关键点保留了3D结构信息,而SECOND是在鸟瞰图(BEV)上进行检测。
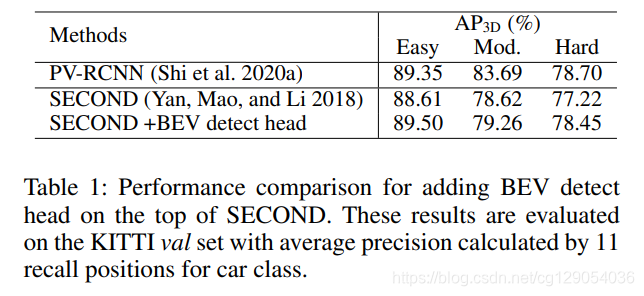
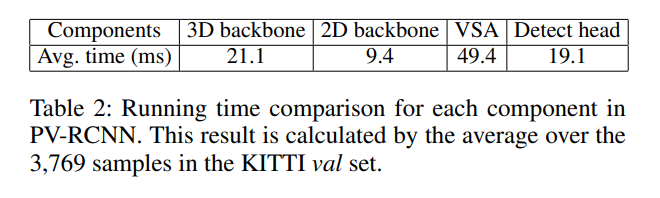
从表1可以看出添加了检测头之后,SECOND的检测精度提升了0.6%,但是仍然远低于PV-RCNN,这表明两阶段检测能提高检测精度,但是鸟瞰图仍然不足以对3D物体进行准确表示。表2可以看出,PV-RCNN中作者提出了VSA模块,这是一个点-体素(point-voxel)特征交互操作,基本消耗了整个运行时间的一半,直接导致检测效率大幅下降。
简单总结下:
3D结构对于3D检测器来说至关重要,而鸟瞰图表示不足以精准预测bounding-box。point-voxel特征计算非常耗时,影响着检测效率,最终作者在本文提出了一个voxel-only的3D检测器。
 |  |
2. Voxel R-CNN Design (重点)

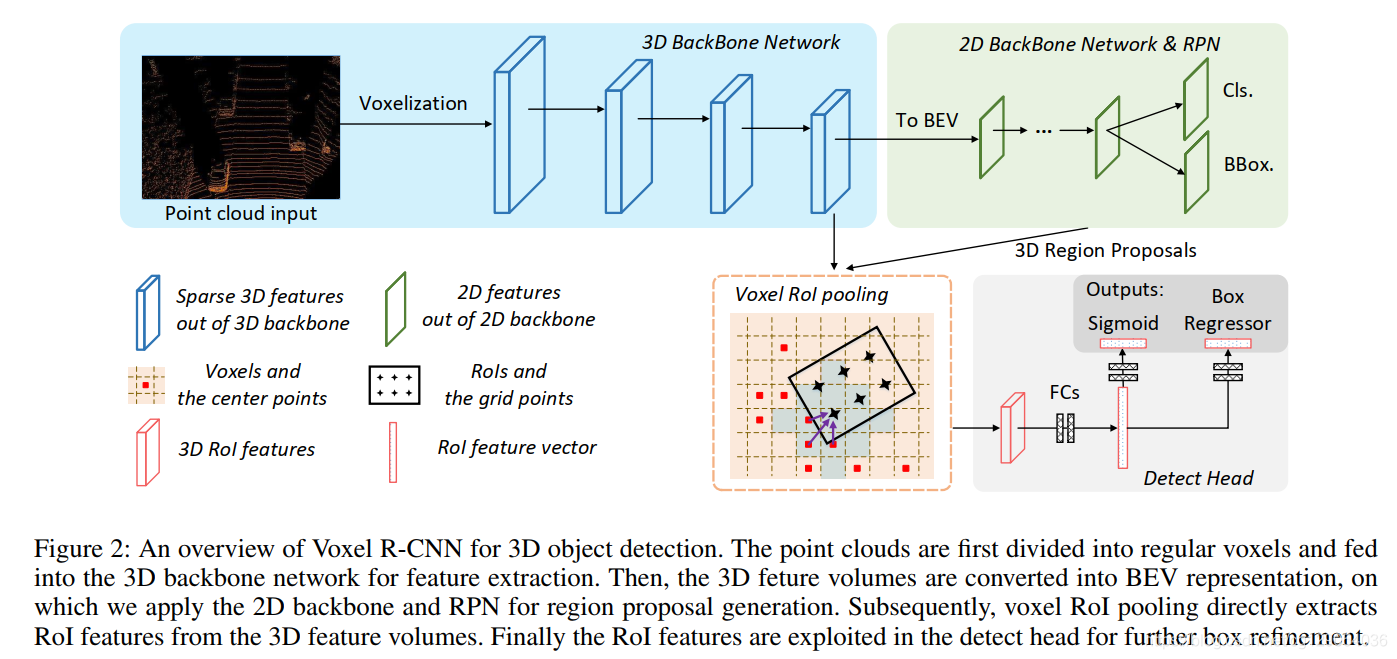
Voxel R-CNN是基于体素的用于3D目标检测的两阶段网络,网络结构图如上图所示。可以看出 Voxel R-CNN由三部分组成:
3D骨干网络2D骨干网络和(RPN)Voxel RoI pooling和Detect Head。
在Voxel R-CNN中,首先将原始点云划分为有规则的体素,然后利用3D骨干网络进行特征提取。 然后将稀疏的3D体素转换为BEV表示形式,在其上应用2D骨干网和RPN生成3D区域方案。 最后使用Voxel RoI Pooling提取RoI特征,将提取的特征输入Detect Head以进行进一步优化。下面详细讨论这些模块。由于本文的主要创新在于Voxel RoI pooling,因此首先对其进行介绍。
2.1 Voxel RoI pooling
Voxel Volumes as Points: 这里先给出了volumes的表示,由非空voxel中心坐标
{
v
i
=
(
x
i
,
y
i
,
z
i
)
}
i
=
1
N
\left\{\boldsymbol{v}_{i}=\right.\left.\left(x_{i}, y_{i}, z_{i}\right)\right\}_{i=1}^{N}
{vi=(xi,yi,zi)}i=1N和特征向量
{
ϕ
i
}
i
=
1
N
\left\{\phi_{i}\right\}_{i=1}^{N}
{ϕi}i=1N组成。
Voxel Query: 如下图所示。在之前的最近邻voxel查找方法中,使用最多的是Ball Query,这里作者提出了Voxel Query,使用曼哈顿距离来进行查找,通过设置曼哈顿距离阈值来采样
K
K
K个voxels。
假设有两个voxels :
α
=
(
i
α
,
j
α
,
k
α
)
\alpha=\left(i_{\alpha}, j_{\alpha}, k_{\alpha}\right)
α=(iα,jα,kα)和
β
=
(
i
β
,
j
β
,
k
β
)
\beta=\left(i_{\beta}, j_{\beta}, k_{\beta}\right)
β=(iβ,jβ,kβ),两个voxels之间的曼哈顿距离计算公式为:
D
m
(
α
,
β
)
=
∣
i
α
−
i
β
∣
+
∣
j
α
−
j
β
∣
+
∣
k
α
−
k
β
∣
D_{m}(\alpha, \beta)=\left|i_{\alpha}-i_{\beta}\right|+\left|j_{\alpha}-j_{\beta}\right|+\left|k_{\alpha}-k_{\beta}\right|
Dm(α,β)=∣iα−iβ∣+∣jα−jβ∣+∣kα−kβ∣
假设有
N
N
N个非空voxels,使用Ball Query则时间复杂度为
O
(
N
)
O(N)
O(N),使用voxel query时间复杂度则为
O
(
K
)
O(K)
O(K),最近邻voxels查找效率上得到了有效改善。

Voxel RoI Pooling Layer: 首先将候选方案划分为
G
×
G
×
G
G \times G \times G
G×G×G个子体素(sub-voxels)。其中心点就是网格点,由于3D特征volumes是很稀疏的,非空voxels大约只占3%空间,不能直接对每个voxel使用最大池化操作。这里作者设计了一个PointNet模块,将近邻voxels特征融合到网格点,模块如下:
η
i
=
max
k
=
1
,
2
,
⋯
,
K
{
Ψ
(
[
v
i
k
−
g
i
;
ϕ
i
k
]
)
}
\boldsymbol{\eta}_{i}=\max _{k=1,2, \cdots, K}\left\{\Psi\left(\left[\boldsymbol{v}_{i}^{k}-\boldsymbol{g}_{i} ; \boldsymbol{\phi}_{i}^{k}\right]\right)\right\}
ηi=k=1,2,⋯,Kmax{Ψ([vik−gi;ϕik])}
其中 v i k − g i v_i^k-g_i vik−gi表示相对坐标, g i g_i gi是网格点坐标, ϕ i k \phi_{i}^{k} ϕik是voxel特征向量, Ψ \Psi Ψ表示多层感知机, η i \eta_{i} ηi是融合的特征向量。在具体实现上,作者在3D主干网最后两层提取了voxel特征,并且在每一层使用了两个不同的曼哈顿距离进行voxel融合,最后将这些不同层不同距离的voxel特征进行融合来获得RoI特征。
Accelerated Local Aggregation: 在这里作者还提出了一个加速PointNet模块。如下图所示,在图(a)中,假设有
M
M
M个网格点,每一个网格点需要查找
K
K
K个voxels,每个voxel特征向量为
C
+
3
C+3
C+3,融合后的特征向量为
C
′
C^{\prime}
C′。则时间复杂度为
O
(
M
×
K
×
(
C
+
3
)
×
C
′
)
O\left(M \times K \times(C+3) \times C^{\prime}\right)
O(M×K×(C+3)×C′)。
在图(b)中,将voxel特征和相对坐标进行拆分,由于特征向量和网格点是相互独立的,我们对每个voxel进行特征变换,则此时间复杂的为
O
(
N
×
C
×
C
′
)
O\left(N \times C \times C^{\prime}\right)
O(N×C×C′);进行voxel query后,我们对相应voxel进行位置特征转换,此时间复杂度为
O
(
M
×
K
×
3
×
C
′
)
O\left(M \times K \times 3 \times C^{\prime}\right)
O(M×K×3×C′),最终时间复杂度为
O
(
N
×
C
×
C
′
+
M
×
K
×
3
×
C
′
)
O\left(N \times C \times C^{\prime} + M \times K \times 3 \times C^{\prime}\right)
O(N×C×C′+M×K×3×C′),由于
M
×
K
M \times K
M×K高出
N
N
N一个数量级,所以其时间复杂度小于
O
(
M
×
K
×
(
C
+
3
)
×
C
′
)
O\left(M \times K \times(C+3) \times C^{\prime}\right)
O(M×K×(C+3)×C′)。

2.2 Training Objectives
( 本节的主干网和区域方案部分以及检测头这里就不详细介绍了,大家可以查看原文,这里对损失函数进行介绍。)
Losses of RPN: RPN损失函数为分类损失和回归损失,函数为:
L
R
P
N
=
1
N
f
g
[
∑
i
L
c
l
s
(
p
i
a
,
c
i
∗
)
+
1
(
c
i
∗
≥
1
)
∑
i
L
r
e
g
(
δ
i
a
,
t
i
∗
)
]
\mathcal{L}_{\mathrm{RPN}}=\frac{1}{N_{\mathrm{fg}}}\left[\sum_{i} \mathcal{L}_{\mathrm{cls}}\left(p_{i}^{a}, c_{i}^{*}\right)+\mathbb{1}\left(c_{i}^{*} \geq 1\right) \sum_{i} \mathcal{L}_{\mathrm{reg}}\left(\delta_{i}^{a}, t_{i}^{*}\right)\right]
LRPN=Nfg1[i∑Lcls(pia,ci∗)+1(ci∗≥1)i∑Lreg(δia,ti∗)]
其中
N
f
g
N_{fg}
Nfg为前景anchors数量,
p
i
a
p_{i}^{a}
pia和
δ
i
a
\delta_{i}^{a}
δia是分类和回归输出,
c
i
∗
c_{i}^{*}
ci∗和
t
i
∗
t_{i}^{*}
ti∗是对应分类和回归目标。
1
(
c
i
∗
≥
1
)
\mathbb{1}\left(c_{i}^{*} \geq 1\right)
1(ci∗≥1)表示只计算前景anchors的回归损失。分类损失函数为Focal Loss,回归损失函数为Huber Loss。
Losses of detect head: 第二阶段置信度函数为:
l
i
∗
(
I
o
U
i
)
=
{
0
I
o
U
i
<
θ
L
I
o
U
i
−
θ
L
θ
H
−
θ
L
θ
L
≤
I
o
U
i
<
θ
H
1
I
o
U
i
>
θ
H
l_{i}^{*}\left(\mathrm{IoU}_{i}\right)=\left\{\begin{array}{ll}0 & \mathrm{IoU}_{i}<\theta_{L} \\\frac{\mathrm{IoU}_{i}-\theta_{L}}{\theta_{H}-\theta_{L}} & \theta_{L} \leq \mathrm{IoU}_{i}<\theta_{H} \\1 & \mathrm{IoU}_{i}>\theta_{H}\end{array}\right.
li∗(IoUi)=⎩⎨⎧0θH−θLIoUi−θL1IoUi<θLθL≤IoUi<θHIoUi>θH
其中
I
o
U
i
\mathrm{IoU}_{i}
IoUi是第
i
i
i个方案和对应真值框的
I
o
U
\mathrm{IoU}
IoU。
θ
H
\theta_H
θH和
θ
L
\theta_L
θL是前景
I
o
U
\mathrm{IoU}
IoU和背景
I
o
U
\mathrm{IoU}
IoU的阈值。置信度预测为二分类交叉熵函数,回归损失为Huber Loss,最终的损失函数为:
L
head
=
1
N
s
[
∑
i
L
cls
(
p
i
,
l
i
∗
(
IoU
i
)
)
+
1
(
IoU
i
≥
θ
reg
)
∑
i
L
reg
(
δ
i
,
t
i
∗
)
]
\begin{aligned}\mathcal{L}_{\text {head }}=& \frac{1}{N_{s}}\left[\sum_{i} \mathcal{L}_{\text {cls }}\left(p_{i}, l_{i}^{*}\left(\operatorname{IoU}_{i}\right)\right)\right.\left.+\mathbb{1}\left(\operatorname{IoU}_{i} \geq \theta_{\text {reg }}\right) \sum_{i} \mathcal{L}_{\text {reg }}\left(\delta_{i}, t_{i}^{*}\right)\right]\end{aligned}
Lhead =Ns1[i∑Lcls (pi,li∗(IoUi))+1(IoUi≥θreg )i∑Lreg (δi,ti∗)]
其中 N s N_s Ns是训练阶段的采样区域方案数量, 1 ( IoU i ≥ θ r e g ) \mathbb{1}\left(\operatorname{IoU}_{i} \geq \theta_{r e g}\right) 1(IoUi≥θreg)表示只计算 I o U \mathrm{IoU} IoU大于 θ r e g \theta_{reg} θreg的区域方案。
3. Experiments
实验部分,作者分别在KITTI和Waymo数据集上进行了验证,实验细节这里不介绍了,可以查看代码和论文,下面几张表是实验结果。
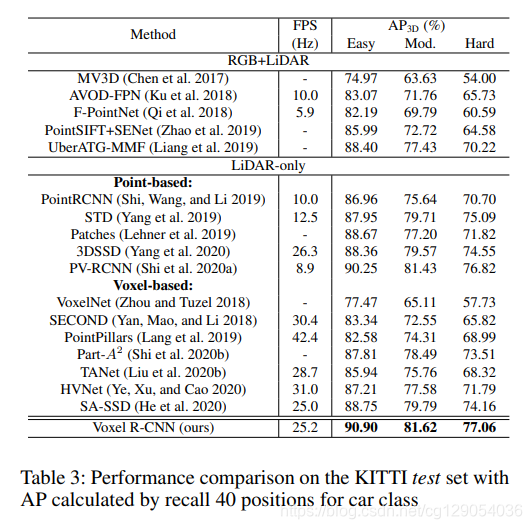 | 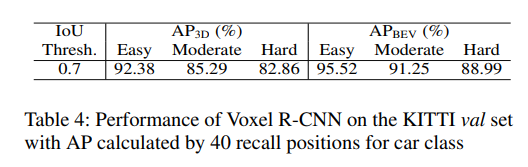 | 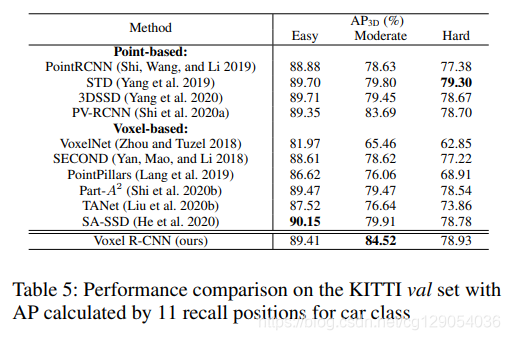 | 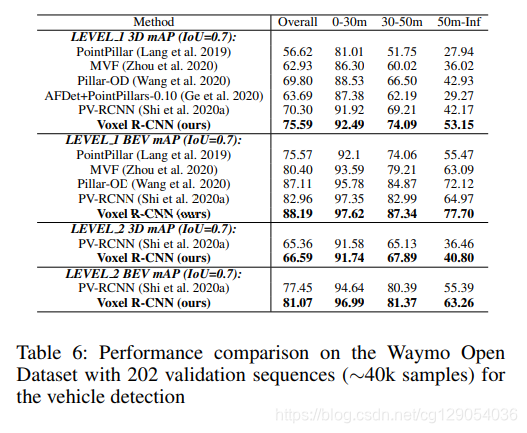 |
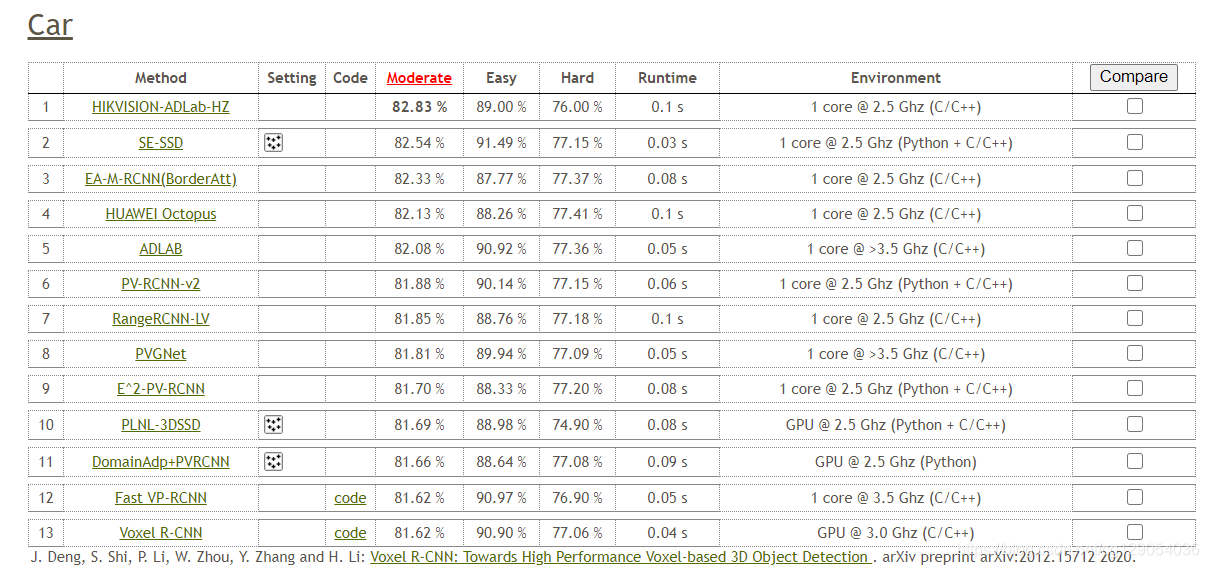
下表是Voxel R-CNN在KITTI数据集上的排名情况,在开源项目中目前暂列第一(截至2021-03-01)。
最后作者做了一些分析实验,对本分提出的voxel query和accelerated PointNet进行了实验分析,下面对表格中的5种方法实验结果进行总结:
- ( a )在BEV特征上进行一阶段检测,效率很快,但精度不高。
- ( b )添加检测头,精度得到了提高,但使用了
ball querry和原始PointNet Module,效率下降很多。 - ( c )使用
voxel query,效率得到提高。 - ( d )使用
加速PointNet Module,效率进一步提高。 - ( e )本文提出的
Voxel R-CNN,取得了最好的检测性能,同时也取得了voxel-based 方法中最快的检测效率。



















 7396
7396

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









