







欢迎关注更多精彩
关注我,学习常用算法与数据结构,一题多解,降维打击。
本文模拟的是刚体碰撞
基于物理的运动模拟
刚体运动的分解
由于刚体本身不会形变。
从物理角度,我们可以把刚体运动分为平移速度v和旋转速度w。
随着时间推移,物体的中心坐标X会跟随速度V发生变化。
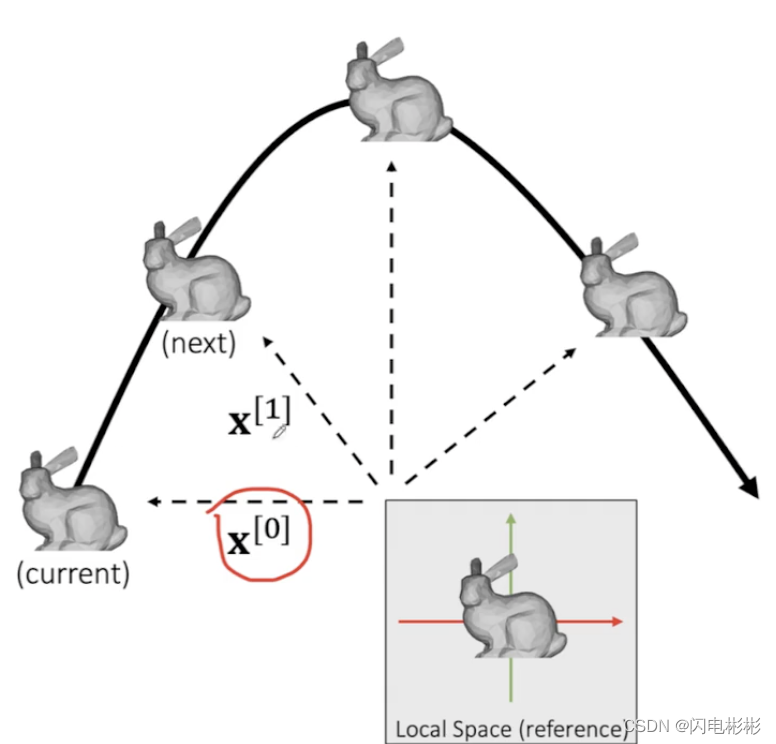
x = x+t*v.
旋转姿态也是同理,
会随着时间推移,物体的旋转姿态R会跟随速度w发生变化。

R = R+t*w.
物理模拟过程
上述过程是在没有外力的情况下,实际情况会受到重力,空气阻力,还有碰撞力的影响。
对于加速度以及速度的模拟如下。
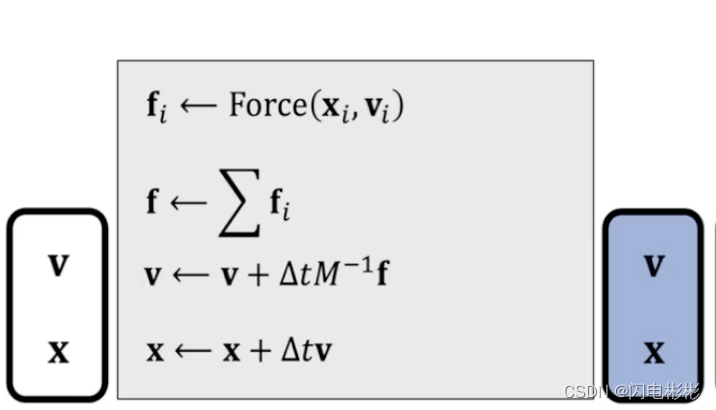
先物体受到的力进行计算f是合力。
合力/M就是加速度,由加速度得到新速度,由速度得到位移。
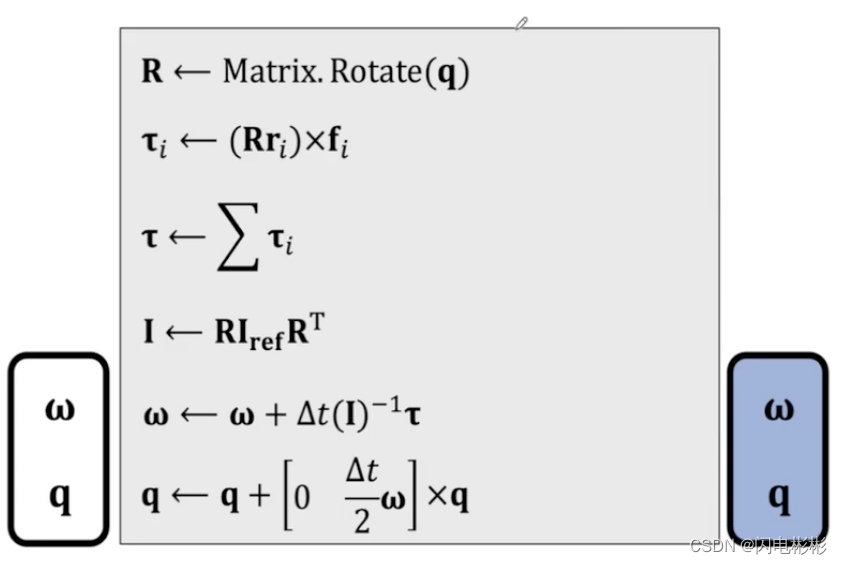
对于旋转,需要考虑转动惯量。
R
是
旋
转
矩
阵
,
τ
i
是
某
一
点
受
到
的
力
矩
,
τ
是
总
力
矩
R是旋转矩阵,\tau_i是某一点受到的力矩,\tau是总力矩
R是旋转矩阵,τi是某一点受到的力矩,τ是总力矩
I
是
转
动
惯
量
,
(
I
)
−
1
τ
是
角
速
度
的
加
速
度
,
ω
是
角
速
度
I是转动惯量,(I)^{-1}\tau 是角速度的加速度,\omega 是角速度
I是转动惯量,(I)−1τ是角速度的加速度,ω是角速度
q
是
最
终
物
体
转
动
的
结
果
q是最终物体转动的结果
q是最终物体转动的结果
利用冲量处理碰撞
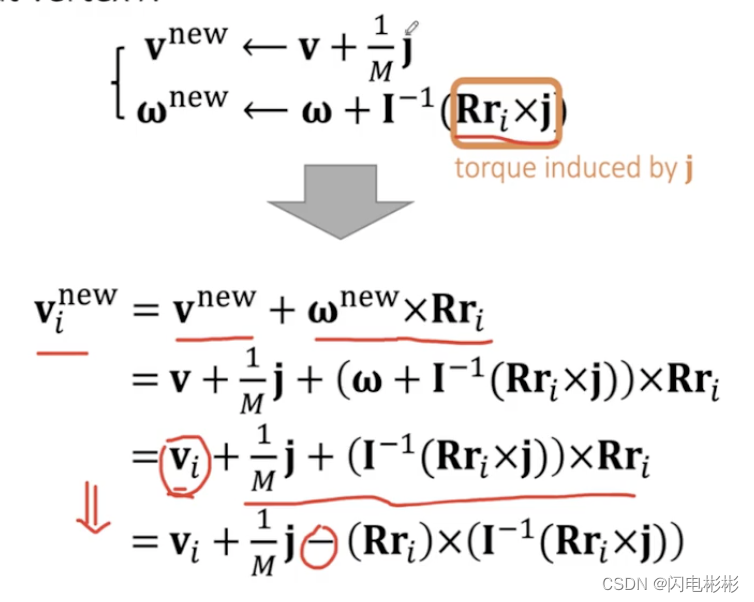
碰撞时点速度计算
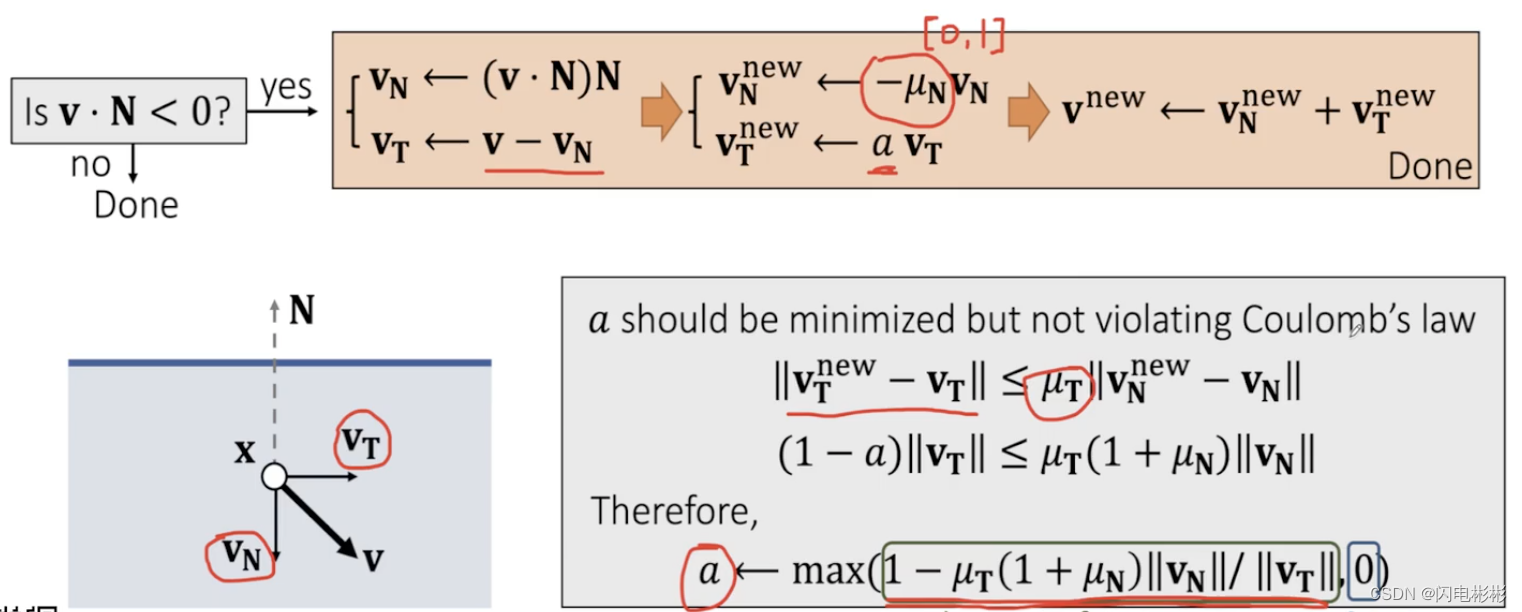
冲量与点速度的关系

证明如下:
处理碰撞过程
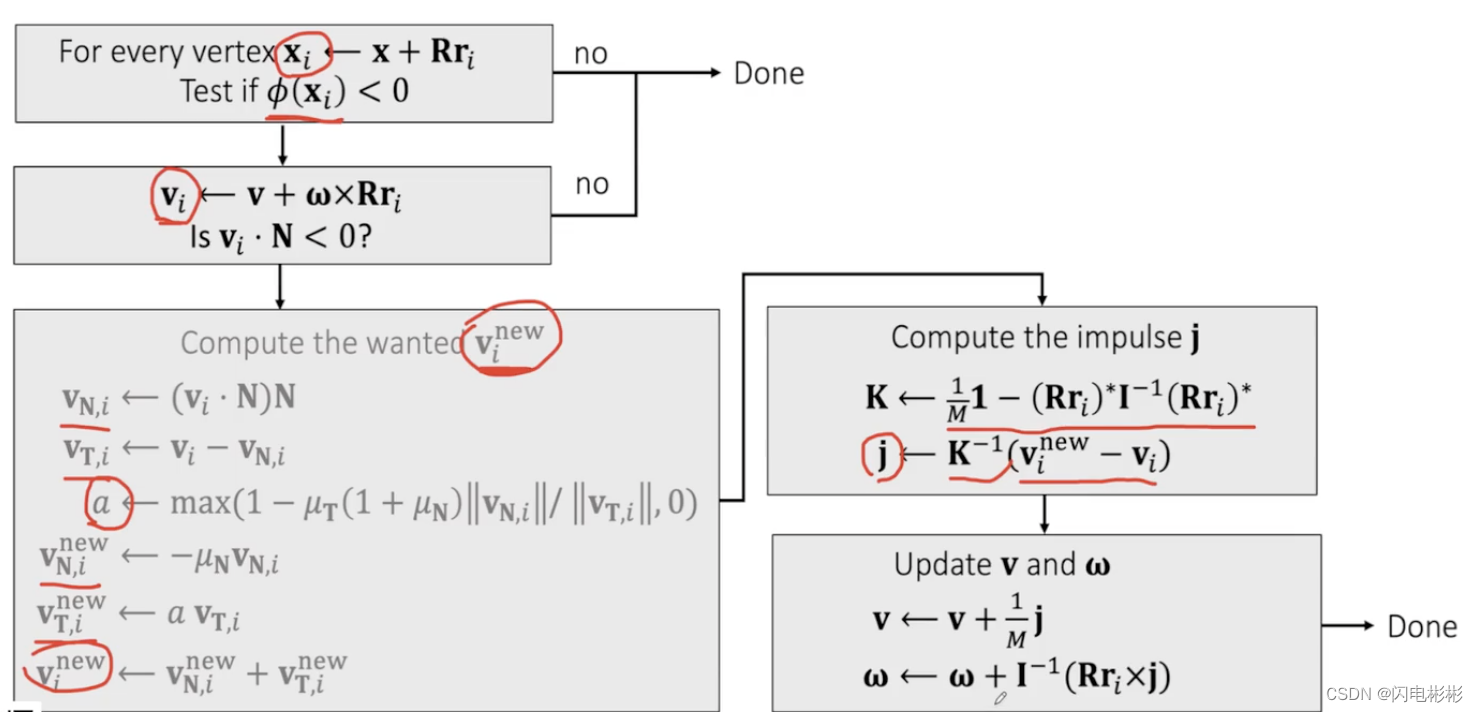
算法实现
关键步骤
正常过程:
根据速度更新位移。
根据角速度更新旋转。
碰撞过程:
根据碰撞计算出点速度。
根据点速度计算出受到的冲量J.
根据冲量计算出速度与角速度。
代码
代码库:https://github.com/LightningBilly/ACMAlgorithms/tree/master/图形学算法/模拟算法/刚体模拟/
using UnityEngine;
using System.Collections;
public class Rigid_Bunny : MonoBehaviour
{
bool launched = false;
float dt = 0.015f;
Vector3 v = new Vector3(0, 0, 0); // velocity
Vector3 w = new Vector3(0, 0, 0); // angular velocity
float mass; // mass
Matrix4x4 I_ref; // reference inertia
float linear_decay = 0.98f; // for velocity decay
float angular_decay = 0.5f;
float restitutionN = 0.5f; // for collision
public float restitutionT = 0.5f;
private float collision_offset = 0.03f;
Matrix4x4 rotation_matrix; // 存储当前旋转矩阵
private Vector3[] vertices;
// Use this for initialization
void Start ()
{
Mesh mesh = GetComponent<MeshFilter>().mesh;
vertices = mesh.vertices;
float m=1;
mass=0;
for (int i=0; i<vertices.Length; i++)
{
mass += m;
float diag=m*vertices[i].sqrMagnitude;
I_ref[0, 0]+=diag;
I_ref[1, 1]+=diag;
I_ref[2, 2]+=diag;
I_ref[0, 0]-=m*vertices[i][0]*vertices[i][0];
I_ref[0, 1]-=m*vertices[i][0]*vertices[i][1];
I_ref[0, 2]-=m*vertices[i][0]*vertices[i][2];
I_ref[1, 0]-=m*vertices[i][1]*vertices[i][0];
I_ref[1, 1]-=m*vertices[i][1]*vertices[i][1];
I_ref[1, 2]-=m*vertices[i][1]*vertices[i][2];
I_ref[2, 0]-=m*vertices[i][2]*vertices[i][0];
I_ref[2, 1]-=m*vertices[i][2]*vertices[i][1];
I_ref[2, 2]-=m*vertices[i][2]*vertices[i][2];
}
I_ref [3, 3] = 1;
}
Matrix4x4 Get_Cross_Matrix(Vector3 a)
{
//Get the cross product matrix of vector a
Matrix4x4 A = Matrix4x4.zero;
A [0, 0] = 0;
A [0, 1] = -a [2];
A [0, 2] = a [1];
A [1, 0] = a [2];
A [1, 1] = 0;
A [1, 2] = -a [0];
A [2, 0] = -a [1];
A [2, 1] = a [0];
A [2, 2] = 0;
A [3, 3] = 1;
return A;
}
Quaternion Add_Quaternion(Quaternion q1, Quaternion q2)
{
return new Quaternion(
q1.x + q2.x,
q1.y + q2.y,
q1.z + q2.z,
q1.w + q2.w);
}
Matrix4x4 Minus_Martix(Matrix4x4 m1, Matrix4x4 m2)
{
return new Matrix4x4(
m1.GetColumn(0) - m2.GetColumn(0),
m1.GetColumn(1) - m2.GetColumn(1),
m1.GetColumn(2) - m2.GetColumn(2),
m1.GetColumn(3) - m2.GetColumn(3));
}
Vector3Int Devide_Vector(Vector3 l, Vector3 r)
{
return new Vector3Int((int)(l.x / r.x), (int)(l.y / r.y), (int)(l.z / r.z));
}
void Impulse_Response(Vector3 collisionPosition, Vector3 collisionNormal)
{
Vector3 ri = rotation_matrix.MultiplyVector(collisionPosition);
Vector3 collisionVertexVelocity = v + Vector3.Cross(w, ri); // 计算点速度
float collisionVertexVelocityNSize = Vector3.Dot(collisionVertexVelocity, collisionNormal); // 查看点速度与法向方向是否相反
if (collisionVertexVelocityNSize >= 0) return; // 相同,不会发生碰撞返回
Vector3 collisionVertexVelocityN = collisionNormal * collisionVertexVelocityNSize; // 计算垂直速度
Vector3 collisionVertexVelocityT = collisionVertexVelocity - collisionVertexVelocityN; // 计算摩擦速度
float a = Mathf.Max(1 - restitutionT * (1 + restitutionN) * collisionVertexVelocityN.magnitude / collisionVertexVelocityT.magnitude, 0);
collisionVertexVelocityN *= -restitutionN;
collisionVertexVelocityT *= a;
float massInverse = 1.0f / mass;
Matrix4x4 massInverseIdentity = new Matrix4x4(
new Vector4(massInverse, 0, 0, 0),
new Vector4(0, massInverse, 0, 0),
new Vector4(0, 0, massInverse, 0),
new Vector4(0, 0, 0, massInverse)
);
Matrix4x4 inertiaInverse = (rotation_matrix * I_ref * rotation_matrix.transpose).inverse;
Matrix4x4 riRotateMartix = Get_Cross_Matrix(ri);
Matrix4x4 K = Minus_Martix(massInverseIdentity, riRotateMartix * inertiaInverse * riRotateMartix);
Vector3 J = K.inverse.MultiplyVector(collisionVertexVelocityN + collisionVertexVelocityT - collisionVertexVelocity);
v += massInverse * J;
w += inertiaInverse.MultiplyVector(Vector3.Cross(ri, J));
// linear_decay *= 0.0001f;
// angular_decay *= 0.001f;
}
// In this function, update v and w by the impulse due to the collision with
//a plane <P, N>
void Collision_Impulse(Vector3 P, Vector3 N)
{
Vector3 positonWithOffset = P + collision_offset * N;
Vector3 collisionVertexAveragePosition = new Vector3();
uint collisionVertexNum = 0;
// 将所有碰撞点取平均值作为碰撞点。
foreach (var r in vertices)
{
Vector3 vertexPosition = transform.position + rotation_matrix.MultiplyVector(r);
if(Vector3.Dot(vertexPosition - positonWithOffset, N) < 0)
{
collisionVertexAveragePosition += r;
collisionVertexNum++;
}
}
if (collisionVertexNum == 0) return;
collisionVertexAveragePosition /= collisionVertexNum;
print("coll");
// 计算碰撞后的速度与角速度
Impulse_Response(collisionVertexAveragePosition, N);
}
// Update is called once per frame
void Update ()
{
//Game Control
if(Input.GetKey("r"))
{
transform.position = new Vector3 (0, 0.6f, 0);
restitutionN = 0.5f;
launched=false;
print("rrrr");
}
if(Input.GetKey("l"))
{
v = new Vector3 (5, 2, 0);
// v = new Vector3 (0, 0, 0);
launched=true;
print("llll");
}
if (!launched) return;
// Part I: Update velocities
Vector3 gravity = new Vector3(0, -9.8f, 0);
//Vector3 gravity = new Vector3(2, 0, 0);
v += dt * gravity; // 计算重加速度与原来速度之和
v *= linear_decay; // 阻力
w *= angular_decay; // 阻力
if (v.magnitude < 1f) restitutionN *= 0.5f;
// Part II: Collision Impulse
rotation_matrix = Matrix4x4.Rotate(transform.rotation);
// Collision_Impulse(new Vector3(0, 0.01f, 0), new Vector3(0, 1, 0));
Collision_Impulse(new Vector3(0, 0, 0), new Vector3(0, 1, 0)); // 检测与地面碰撞
Collision_Impulse(new Vector3(2, 0, 0), new Vector3(-1, 0, 0)); // 检测与竖墙碰撞
// Part III: Update position & orientation
//Update linear status
Vector3 x = transform.position;
x += dt * v; // 计算位移
//Update angular status
Quaternion q = transform.rotation;
q = Add_Quaternion(new Quaternion(w.x, w.y, w.z, 0) * q, q); //计算转动状态
// Part IV: Assign to the object
transform.position = x;
transform.rotation = q;
}
}
算法效果
本人码农,希望通过自己的分享,让大家更容易学懂计算机知识。
















 196
196











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









