






文章目录
navigation
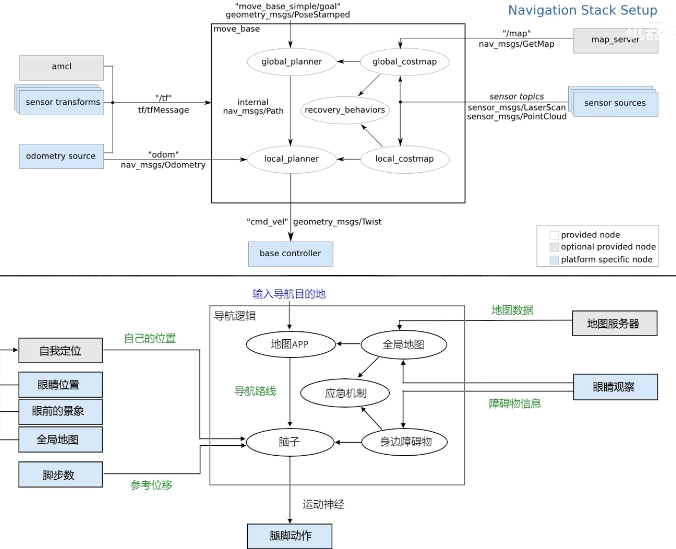
move_base
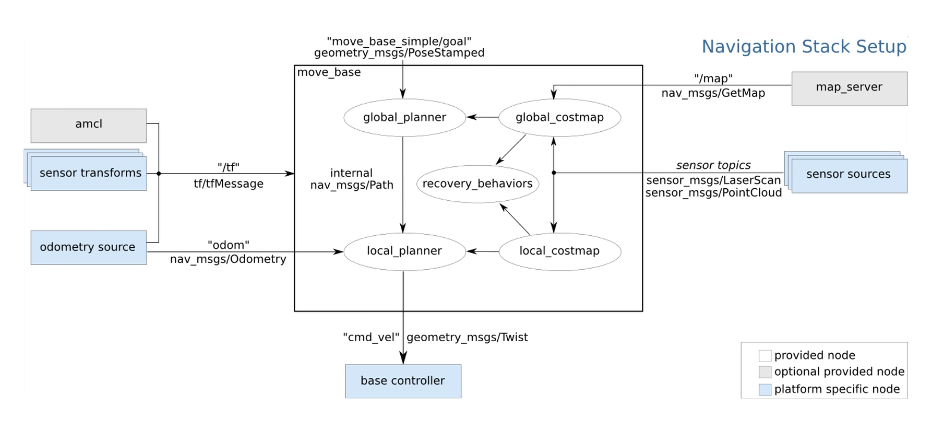
主要组件
- 全局规划器(Global Planner):
负责生成从起点到目标点的全局路径。
常用实现包括 navfn 和 global_planner。 - 局部规划器(Local Planner):
负责根据全局路径和局部环境信息(如障碍物)生成具体的运动指令。
常用实现包括 base_local_planner 和 dwa_local_planner。 - 代价地图(Costmap):
用于表示机器人周围环境的代价信息,帮助规划器避开障碍物。
包括全局代价地图和局部代价地图。 - 恢复行为(Recovery Behaviors)
当机器人在导航过程中遇到问题(如被困住)时,move_base 会执行恢复行为。
默认的恢复行为包括:
清除代价地图中的障碍物。
原地旋转以重新规划路径。
下载一些配置文件
git clone https://github.com/6-robot/wpb_home.git
cd wpb_home/wpb_home_bringup/scripts/
./install_for_noetic.sh
cd ~/catkin_ws/
catkin_make
catkin_create_pkg nav_pkg roscpp rospy move_base_msgs actionlib
map文件先保持到wpr_simulation下的maps文件夹
roslaunch wpr_simulation wpb_stage_robocup.launch
roslaunch nav_pkg nav.launch
rviz
添加map和机器人
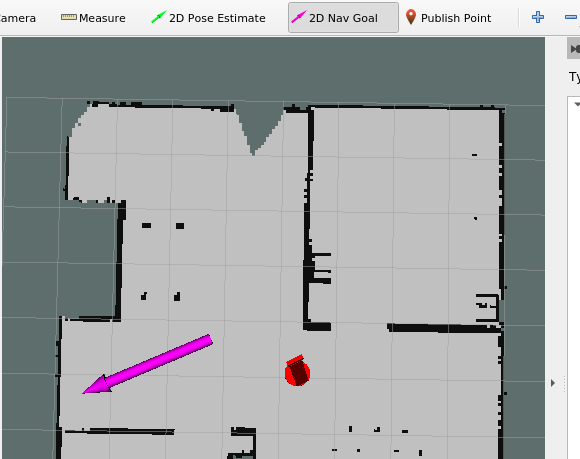
这个是选择导航的目的地和到达对应位置后的朝向
还可以添加path显示路线
全局规划器
变量名称对应使用哪种全局规划器

参数配置
- 关键参数:
~base_global_planner:指定全局规划器插件(默认为 navfn/NavfnROS)。
~base_local_planner:指定局部规划器插件(默认为 base_local_planner/TrajectoryPlannerROS)。
~recovery_behaviors:指定恢复行为列表。
~controller_frequency:控制循环的频率。
~planner_patience 和 ~controller_patience:规划和控制的超时时间。 - 其他参数:包括代价地图的配置、振荡检测等。
AMCL 定位算法
- rviz里分裂各种粒子,即不同位置不同朝向的可能机器人位置
- 然后实际移动一段距离并雷达扫描得到里程计距离+雷达扫描特征
- 然后再通过将里程计距离叠加到各个粒子里,通过雷达特征匹配进行末尾淘汰
- 重复上述三步
-
功能:amcl 是一个用于机器人 2D 定位的概率系统,实现了自适应(或 KLD采样)蒙特卡洛定位方法,使用粒子滤波器跟踪机器人在已知地图中的位姿。
-
算法:使用多种算法,包括 sample_motion_model_odometry、beam_range_finder_model、likelihood_field_range_finder_model、Augmented_MCL 和 KLD_Sampling_MCL。
-
传感器支持:目前仅支持激光扫描和激光地图,但可以扩展到其他传感器数据。
-
节点:amcl 节点接收激光地图、激光扫描和变换消息,输出位姿估计。
-
订阅主题:
scan (sensor_msgs/LaserScan):激光扫描数据。
tf (tf/tfMessage):变换消息。
initialpose (geometry_msgs/PoseWithCovarianceStamped):用于初始化粒子滤波器的均值和协方差。
map (nav_msgs/OccupancyGrid):当 use_map_topic 参数设置时,订阅该主题以获取用于激光定位的地图。 -
发布主题:
amcl_pose (geometry_msgs/PoseWithCovarianceStamped):机器人在地图中的估计位姿及协方差。
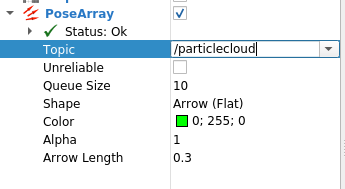
particlecloud (geometry_msgs/PoseArray):滤波器维护的位姿估计集合。
tf (tf/tfMessage):发布从 odom 到 map 的变换。
本体和分身切换就是map->odom
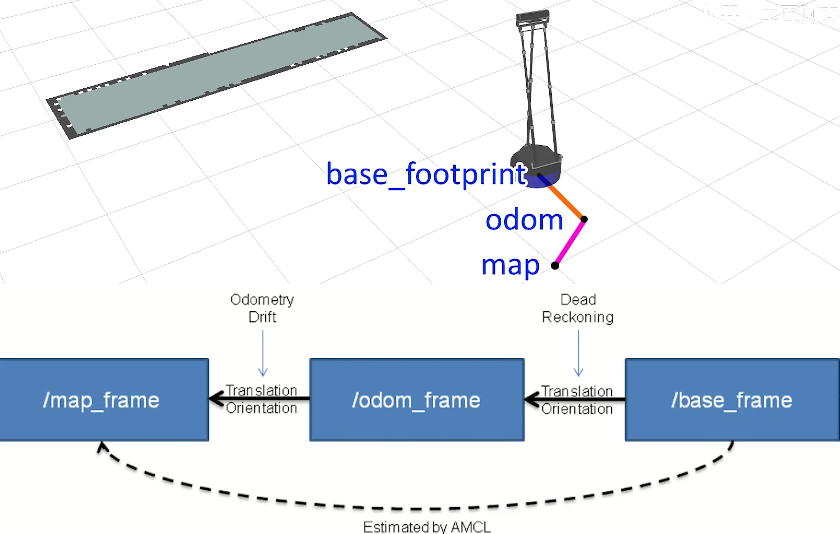
rviz里看到的是最匹配的,但每次分身都会变化到最匹配的那个分身,所以显示的跳跃。但里程计输出是平滑的
roslaunch wpr_simulation wpb_stage_robocup.launch
roslaunch nav_pkg nav.launch
rviz
代价地图
代价地图(Costmap) 是机器人操作系统(ROS,Robot Operating System)中用于路径规划和导航的重要数据结构。它通过为地图上的每个单元格分配一个“代价”值来表示机器人在该位置移动的难易程度或风险程度。
roslaunch wpr_simulation wpb_stage_robocup.launch
roslaunch nav_pkg nav.launch
rviz
<launch>
<!--- Run move_base -->
<node pkg="move_base" type="move_base" name="move_base">
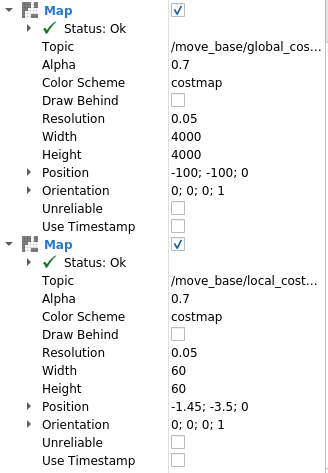
<rosparam file="$(find wpb_home_tutorials)/nav_lidar/costmap_common_params.yaml" command="load" ns="global_costmap" />
<rosparam file="$(find wpb_home_tutorials)/nav_lidar/costmap_common_params.yaml" command="load" ns="local_costmap" />
<rosparam file="$(find wpb_home_tutorials)/nav_lidar/global_costmap_params.yaml" command="load" />
<rosparam file="$(find wpb_home_tutorials)/nav_lidar/local_costmap_params.yaml" command="load" />
<param name="base_global_planner" value="global_planner/GlobalPlanner" />
<param name="base_local_planner" value="wpbh_local_planner/WpbhLocalPlanner" />
</node>
<!-- Run map server -->
<node pkg="map_server" type="map_server" name="map_server" args="$(find wpr_simulation)/maps/mymap.yaml"/>
<!--- Run AMCL -->
<node pkg="amcl" type="amcl" name="amcl"/>
<node name="rviz" pkg="rviz" type="rviz" args="-d $(find nav_pkg)/rviz/nav.rviz"/>
</launch>
代价地图的不同层次
Static Map Layer:静态地图层,基本上不变的地图层,通常都是SLAM建立完成的静态地图。
Obstacle Map Layer:障碍地图层,用于动态的记录传感器感知到的障碍物信息。
Inflation Layer:膨胀层,在以上两层地图上进行膨胀(向外扩张),以避免机器人的撞上障碍物。
Master Layer:组合层,将上述各层的信息进行综合处理,生成最终的代价地图。
代价地图参数设置
-
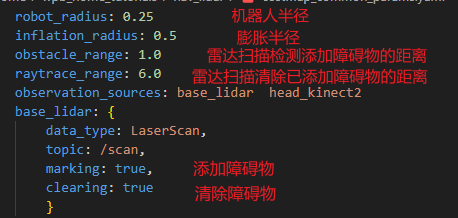
功能:costmap_2d 包提供了一个 2D 代价地图的实现,用于机器人导航。它接收传感器数据,构建 2D 或 3D 占用网格(取决于是否使用体素实现),并根据占用网格和用户指定的膨胀半径在 2D 代价地图中膨胀代价。
-
标记和清除(Marking and Clearing):
代价地图会自动订阅传感器主题,并根据传感器数据更新自身。
每个传感器用于标记(插入障碍物信息)或清除(移除障碍物信息)代价地图,或两者兼有。
占用、自由和未知空间(Occupied, Free, and Unknown Space):
代价地图中的每个单元格可以有 255 种不同的代价值,但底层结构只能表示三种状态:自由、占用或未知。
每种状态在投影到代价地图时都有一个特殊的代价值。 -
地图更新(Map Updates):
代价地图以指定的更新频率(update_frequency)执行地图更新周期。
在每个周期中,传感器数据被处理,标记和清除操作在底层占用结构中执行,然后投影到代价地图中。 -
变换(tf):
代价地图使用 tf(变换)来插入传感器数据。假设全局坐标系(global_frame)、机器人基座坐标系(robot_base_frame)和传感器源之间的所有变换都是连接且最新的。
transform_tolerance 参数设置这些变换之间的最大延迟时间。 -
膨胀(Inflation):
膨胀是将代价值从占用单元格向外传播的过程,代价值随着距离的增加而减小。
定义了 5 种特定的代价值符号,用于表示机器人与障碍物的关系。 -
静态地图(Static Map):
使用用户生成的静态地图初始化代价地图(如通过 map_server 包构建的地图)。
代价地图的宽度、高度和障碍物信息与静态地图匹配。 -
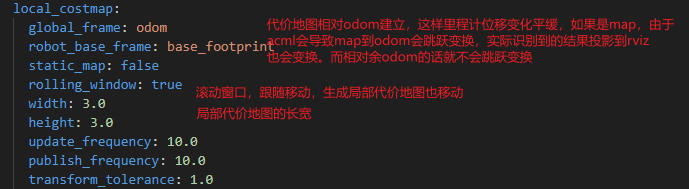
滚动窗口(Rolling Window):
设置 rolling_window 参数为 true,使机器人在移动时保持在代价地图的中心,随着机器人远离某个区域,障碍物信息从地图中移除。
这种配置通常用于机器人只关心局部区域的障碍物的情况。 -
坐标系和变换参数:
global_frame:代价地图的全局坐标系(默认为 /map)。
robot_base_frame:机器人基座坐标系(默认为 base_link)。
transform_tolerance:变换数据的延迟容忍时间(默认为 0.2 秒)。 -
频率参数:
update_frequency:地图更新频率(默认为 5.0 Hz)。
publish_frequency:地图发布频率(默认为 0.0 Hz,表示仅发布更新部分)。 -
地图管理参数:
rolling_window:是否使用滚动窗口(默认为 false)。
always_send_full_costmap:是否每次更新都发布完整代价地图(默认为 false)。
width、height、resolution、origin_x、origin_y:地图的宽度、高度、分辨率和原点坐标。

恢复行为
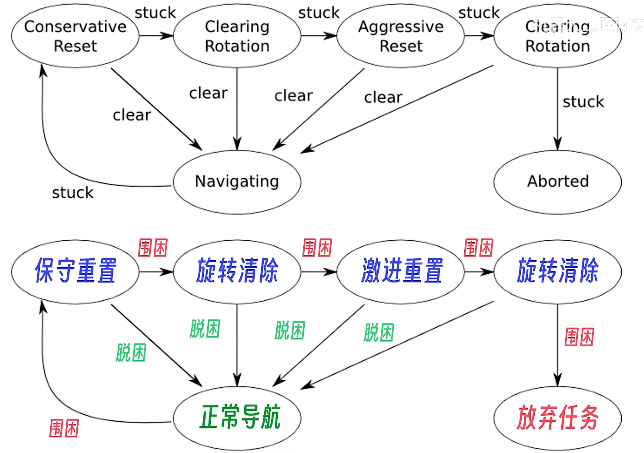
- Conservative Reset(保守重置):
描述:机器人尝试清除地图中超出指定区域的障碍物信息。
转换:
如果成功清除障碍物并继续导航,则进入 Navigating(正常导航) 状态。
如果清除失败或仍然被困住,则进入 Clearing Rotation(旋转清除) 状态。 - Clearing Rotation(旋转清除):
描述:机器人执行原地旋转,以尝试清除局部障碍物信息。
转换:
如果旋转后成功清除障碍物并继续导航,则进入 Navigating(正常导航) 状态。
如果旋转后仍然被困住,则进入 Aggressive Reset(激进重置) 状态。 - Aggressive Reset(激进重置):
描述:机器人更激进地清除地图中的障碍物信息,包括所有超出指定区域的障碍物。
转换:
如果成功清除障碍物并继续导航,则进入 Navigating(正常导航) 状态。
如果清除失败或仍然被困住,则进入 Clearing Rotation(旋转清除) 状态。 - Navigating(正常导航):
描述:机器人在正常导航状态,按照规划的路径移动。
转换:
如果遇到障碍物或被困住,则进入 Conservative Reset(保守重置) 状态。 - Aborted(放弃任务):
描述:如果所有恢复行为都失败,机器人认为目标不可达,放弃导航任务。
转换:
无进一步转换,任务结束。
恢复行为参数设置
recovery_behaviors:
- name: 'rotate_recovery'
type: 'rotate_recovery/RotateRecovery'
- name: 'reset_recovery'
type: 'clear_costmap_recovery/ClearCostmapRecovery'
clear_costmap_recovery 包提供了一种恢复行为(Recovery Behavior),用于在机器人导航过程中清除代价地图(costmap)中的障碍物信息,以帮助机器人摆脱困境并继续导航。
该恢复行为通过将代价地图中超出指定区域的障碍物信息清除,使机器人能够重新规划路径。
清除的区域是一个以机器人为中心的正方形区域,区域的边长由 reset_distance 参数决定。
rotate_recovery:
reset_distance: 2.0
layer_names: ["obstacle_layer"]
- ~/reset_distance (double, default: 3.0):
指定清除障碍物的区域边长(以机器人为中心的正方形区域),单位为米。
例如,reset_distance: 3.0 表示清除机器人周围 3 米范围内的障碍物信息。 - ~/invert_area_to_clear (bool, default: false):
如果设置为 false,则清除指定区域外的障碍物信息;如果设置为 true,则清除指定区域内的障碍物信息。 - ~/layer_names (list, default: [“obstacles”]):
指定要清除的图层名称。默认情况下,只清除 obstacles 图层。
rotate_recovery 包提供了一种恢复行为(Recovery Behavior),用于在机器人导航过程中通过执行 360 度旋转来清除代价地图(costmap)中的障碍物信息,从而帮助机器人摆脱困境并继续导航。
执行 360 度旋转:
该恢复行为通过让机器人在原地旋转 360 度,更新传感器数据,从而清除代价地图中的障碍物信息。
旋转过程中,机器人会重新扫描周围环境,更新代价地图中的障碍物信息。
reset_recovery:
reset_distance: 0.0
layer_names: ["obstacle_layer"]
- ~/sim_granularity (double, default: 0.017):
检查原地旋转是否安全时,每次检查的角度间隔(以弧度为单位)。默认值为 0.017 弧度(约 1 度)。 - ~/frequency (double, default: 20.0):
发送速度指令给移动基座的频率(以 Hz 为单位)。默认值为 20.0 Hz。 - ~TrajectoryPlannerROS/yaw_goal_tolerance (double, default: 0.05):
控制器在实现目标时,偏航角(yaw)的容差(以弧度为单位)。默认值为 0.05 弧度。 - ~TrajectoryPlannerROS/acc_lim_th (double, default: 3.2):
机器人的旋转加速度限制(以弧度/秒² 为单位)。默认值为 3.2 弧度/秒²。 - ~TrajectoryPlannerROS/max_rotational_vel (double, default: 1.0):
基座允许的最大旋转速度(以弧度/秒 为单位)。默认值为 1.0 弧度/秒。 - ~TrajectoryPlannerROS/min_in_place_rotational_vel (double, default: 0.4):
原地旋转时基座允许的最小旋转速度(以弧度/秒 为单位)。默认值为 0.4 弧度/秒。
局部规划器
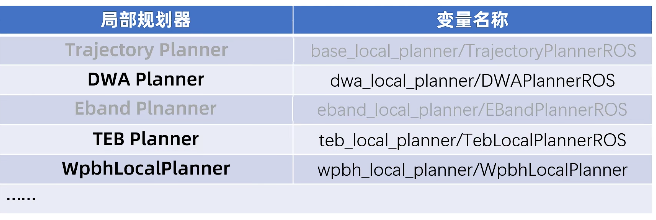
wpbbh_local_planner/WpbbhLocalPlanner就是根据激光雷达采集的信息,把代价地图和广度优先搜索算法在代局部规划期里又实现了一遍。采用了人工势场的方法,绕过障碍物又回到全局路线里
DWA
动态窗口法(Dynamic Window Approach, DWA)
- 状态空间采样:在当前时刻,基于机器人的速度和加速度限制,计算出可能的速度组合(线速度 v 和角速度 ω),形成动态速度窗口。
动态窗口可以表示为一个速度范围,其中包含机器人在当前时刻可以安全地采取的速度组合(线速度 v 和角速度 ω) - 轨迹生成:对于每一对 (v,ω),通过运动模型预测未来的轨迹,通常在一定时间跨度内进行预测。
- 评估轨迹:根据轨迹的质量评估函数(通常包括距离目标点的距离、与障碍物的安全距离等),给每条轨迹打分。
- 选择最佳速度:选择得分最高的速度命令,使得机器人在运动中既能达到目标,又能有效避开障碍物。
动态调参
rosrun rqt_reconfigure rqt_reconfigure
参数选择
- 速度参数
max_vel_x: 最大 x 方向速度,单位为米/秒。机器人能够达到的最大线速度。
min_vel_x: 最小 x 方向速度,单位为米/秒。设置负数会允许倒车。
max_vel_y: 差分驱动机器人的最大 y 方向速度为 0.0。
min_vel_y: 差分驱动机器人的最小 y 方向速度为 0.0。
max_vel_trans: 最大平移速度,单位为米/秒。机器人能够达到的最大综合线速度。
min_vel_trans: 最小平移速度,单位为米/秒。建议不要设置为 0.0,避免机器人无法移动。
trans_stopped_vel: 当平移速度小于这个值时,机器人会停止。
acc_lim_trans: 最大平移加速度,单位为米/秒²。
acc_lim_x: x 方向的最大加速度上限,单位为米/秒²。
acc_lim_y: y 方向的加速度上限,差分驱动机器人应设置为 0.0。
max_vel_theta: 最大旋转速度,单位为弧度/秒。应略小于基座的功能极限。
min_vel_theta: 最小角速度,单位为弧度/秒。当平移速度可以忽略时的最小角速度。
theta_stopped_vel: 当旋转速度小于这个值时,机器人会停止。
acc_lim_theta: 旋转的加速度上限,单位为弧度/秒²。 - 目标容差参数
yaw_goal_tolerance: 目标航向容差,单位为弧度。机器人达到目标点时允许的偏航角误差。
xy_goal_tolerance: 目标 xy 容差,单位为米。机器人达到目标点时允许的 xy 位置误差。
latch_xy_goal_tolerance: 如果设置为 true,在机器人进入目标点的 xy 容差范围内后,即使之后机器人稍微偏离容差范围,也会继续认为目标已达成。 - 向前模拟参数
sim_time: 模拟时间,单位为秒。表示算法模拟机器人运动的时间跨度。
vx_samples: x 方向速度采样数。表示在 x 方向上采样多少个不同的速度。
vy_samples: 差分驱动机器人 y 方向速度采样数,只有一个样本。
vtheta_samples: 旋转速度采样数。表示在角速度方向上采样多少个不同的速度。 - 轨迹评分参数
path_distance_bias: 靠近全局路径的权重。较高的值会使机器人更倾向于保持在全局路径附近。
goal_distance_bias: 接近导航目标点的权重。较高的值会使机器人更倾向于尽快到达目标点。
occdist_scale: 控制器避障的权重。较高的值会使机器人更倾向于避开障碍物。
forward_point_distance: 从机器人到评分点的位置,单位为米。表示在机器人的前方多远的位置进行障碍物检测。
stop_time_buffer: 在碰撞前机器人必须停止的时间长度,留出缓冲空间,单位为秒。
scaling_speed: 缩放机器人速度的绝对值。当机器人速度超过这个值时,足迹会开始缩放。
max_scaling_factor: 机器人足迹在高速时能缩放的最大系数。 - 防振动参数
oscillation_reset_dist: 重置振动标志前需要行进的距离,单位为米。如果机器人在移动过程中,距离变化小于这个值,可能会被视为振动。 - 辅助调试选项
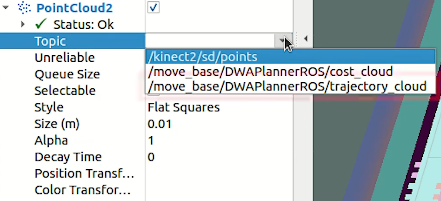
publish_traj_pc: 是否在 RViz 中发布轨迹。如果设置为 true,可以在 RViz 中看到机器人生成的轨迹。
publish_cost_grid_pc: 是否在 RViz 中发布代价网格。如果设置为 true,可以在 RViz 中看到代价网格。
global_frame_id: 基础坐标系。表示机器人在世界坐标系中的位置。 - 差分驱动机器人配置
holonomic_robot: 是否为全向移动机器人。如果设置为 true,表示机器人具有全向移动能力。
rviz显示可能轨迹
TEB
teb_local_planner 是 ROS 导航堆栈中的一个局部轨迹规划器插件,基于 Timed-Elastic-Bands 方法。它能够在运行时优化机器人的轨迹,同时考虑轨迹执行时间、与障碍物的距离以及运动学和动力学约束。
teb_local_planner 基于非线性优化,实时地为机器人生成平滑、安全且高效的局部轨迹。其核心方法是「基于时间的弹性带(Timed-Elastic-Bands)」,该方法通过引入虚拟力来拉伸或压缩轨迹,以适应环境约束和机器人动力学。
-
TEB算法首先从全局规划器提供的全局路线中选择一段作为初始轨迹。
-
根据这段轨迹的起点和终点,生成一条连线(时间弹性带)。这条连线由多个离散的时间点组成,每个时间点对应机器人的一个位姿(位置和姿态)
-
全局路线对TEB连线具有吸引力,即算法会尽量使连线靠近全局路线。这通过在优化过程中施加一个目标函数来实现,该目标函数使得连线上的点尽量接近全局路线上的点
-
障碍物对TEB连线具有排斥力,即算法会尽量使连线远离障碍物。这通过在优化过程中施加另一个目标函数来实现,该目标函数使得连线上的点尽量远离障碍物。
TEB算法通过多目标优化来调整连线的形状。优化的目标包括:
路径长度:尽量缩短路径长度。
轨迹运行时间:尽量减少轨迹的执行时间。
与障碍物的距离:保持与障碍物的安全距离。
通过中间路径点:尽量通过全局路线上的关键点。
机器人动力学和运动学约束:确保轨迹符合机器人的运动能力。
sudo apt install ros-noetic-teb-local-planner
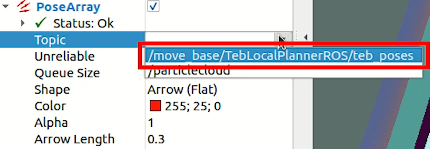
rviz显示选择路径和每个时间段的位置
- 速度相关参数
max_vel_x:机器人最大的平移速度,单位为米/秒。表示机器人在平移方向上能够达到的最快速度。
max_vel_x_backwards:机器人向后行驶时的最大绝对平移速度,单位为米/秒。如果设置为0或负数,会导致错误。可以通过减少倒车权重来调整倒车速度,而不是直接修改此参数。
max_vel_theta:机器人最大的旋转速度,单位为弧度/秒。与最小转弯半径相关,计算公式为r=v/ω ,其中 r 为转弯半径,v 为线速度,ω 为角速度。 - 加速度相关参数
acc_lim_x:机器人在x方向上的最大加速度,单位为米/秒²。限制了机器人在平移方向上加速或减速的速率。
acc_lim_theta:机器人最大的旋转加速度,单位为弧度/秒²。限制了机器人在旋转方向上加速或减速的速率。 - 转弯半径相关参数
min_turning_radius:最小转弯半径。如果设置为0,表示机器人可以原地转弯。
wheelbase:只有在 cmd_angle_instead_rotvel 为 True 时才有效。表示机器人后轴与前轴之间的距离。
cmd_angle_instead_rotvel:是否将收到的角速度消息转换为操作上的角度变化。如果设置为 True,则话题 vel_msg.angular.z 内的数据是转轴角度。 - 车体轮廓相关参数
footprint_model:定义机器人的轮廓模型,用于优化过程中的碰撞检测。支持的模型类型包括:“point”(点模型)、“circular”(圆形模型)、“two_circles”(双圆模型)、“line”(线模型)、“polygon”(多边形模型)。
type:指定轮廓模型的类型,例如 “circular”。
radius:仅对类型 “circular” 有效。表示圆形轮廓的半径。
line_start 和 line_end:仅对类型 “line” 有效。分别表示线段的起点和终点坐标。
front_offset、front_radius、rear_offset、rear_radius:仅对类型 “two_circles” 有效。分别表示前圆和后圆的偏移量和半径。
vertices:仅对类型 “polygon” 有效。表示多边形的顶点坐标。 - 到达目标点的判断容差
xy_goal_tolerance:机器人到达目标位置时允许的欧几里得距离偏差,单位为米。表示在二维平面上,机器人与目标位置之间的最大允许距离。
yaw_goal_tolerance:机器人到达目标方向时允许的偏差,单位为弧度。表示机器人在旋转方向上的最大允许偏差。 - 障碍物相关参数
min_obstacle_dist:机器人与障碍物之间的最小允许距离,单位为米。机器人会尽量保持在这个距离之外,以避免与障碍物发生碰撞。
inflation_dist:障碍物的膨胀距离,单位为米。在计算路径时,机器人会将障碍物的范围扩大这个距离,以确保更安全的路径规划。
include_costmap_obstacles:是否考虑局部成本图中的障碍物。如果设置为 True,则会将成本图中的障碍物纳入路径规划的考虑范围。
costmap_obstacles_behind_robot_dist:机器人身后多远距离内的障碍物会被纳入检测范围,单位为米。如果设置为较远的距离,机器人可以更早地感知到身后的障碍物,从而做出相应的避障动作。
obstacle_poses_affected:障碍物对附近多少个关键点产生影响。较大的数值会导致更严格的避障行为,但也会增加计算量。 - 路径优化相关参数
no_inner_iterations:图优化算法中的内部迭代次数。较大的数值可以提高轨迹的优化效果,但也会增加计算时间。
no_outer_iterations:外部循环的迭代次数。与内部迭代次数相结合,可以进一步提高轨迹的优化效果。
penalty_epsilon:为所有的惩罚项增加一个小的安全余量,以避免数值不稳定问题。
weight_max_vel_x、weight_max_vel_theta、weight_acc_lim_x、weight_acc_lim_theta:分别为平移速度、旋转速度、平移加速度和旋转加速度的优化权重。这些权重决定了在轨迹优化过程中,各个因素的相对重要性。
weight_kinematics_nh:非完整运动学的优化权重。较高的权重可以更严格地满足机器人的运动学约束。
weight_kinematics_forward_drive:往前移动的权重。较高的权重可以促使机器人优先选择向前行驶的路径。
weight_optimaltime:耗时权重。较高的权重会促使机器人选择更快速的路径。
weight_obstacle:与障碍物保持距离的权重。较高的权重可以更严格地避免与障碍物发生碰撞。 - 多线规划相关参数
enable_homotopy_class_planning:是否激活多线规划。如果设置为 True,机器人会同时规划多条不同拓扑结构的路径,并选择最优的一条。
enable_multithreading:是否启用多线程计算。如果设置为 True,可以提高规划效率。
max_number_classes:最多考虑的路径线数上限。限制了同时规划的路径数量,避免计算量过大。
selection_cost_hysteresis:路径轨迹入选的评价上限。只有当候选路径的评价低于当前选定路径的评价乘以这个倍数时,才会被选中,从而避免频繁切换路径。
selection_obst_cost_scale:障碍物评价在入选标准中的缩放倍率。较高的倍率会更严格地考虑障碍物的影响。
selection_alternative_time_cost:时间成本是否进行平方计算。如果设置为 True,时间成本将按平方计算,从而更重视时间因素。
roadmap_graph_no_samples:为创建 roadmap graph 而生成的样本数。较多的样本可以提高路径规划的准确性,但也会增加计算时间。
roadmap_graph_area_width:关键点采样的宽度,单位为米。较大的宽度会增加路径规划的灵活性,但也会增加计算时间。
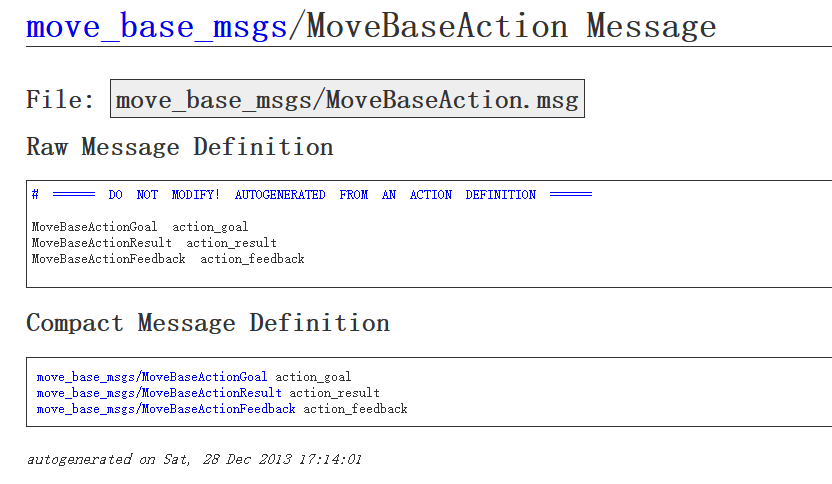
导航Action 编程接口
Action 通信是一种双向的消息传递机制,与传统的Topic通信不同,Action可以提供连续的反馈信息。
导航Action通信包括三个主要部分:
- 目标请求(Goal Request):客户端向服务器发送的目标请求,包含导航目标点的坐标和姿态。
- 结果(Result):服务器在完成导航任务后返回的结果,表示导航是否成功。
- 反馈(Feedback):服务器在导航过程中定期向客户端发送的反馈信息,用于实时监控导航进程。
坐标导航实现
http://docs.ros.org/en/fuerte/api/move_base_msgs/html/msg/MoveBaseAction.html
#include<ros/ros.h>
#include<move_base_msgs/MoveBaseAction.h>
#include<actionlib/client/simple_action_client.h>
//参数需要指定动作的类型
typedef actionlib::SimpleActionClient<move_base_msgs::MoveBaseAction> MoveBaseClient;
int main(int argc, char** argv){
ros::init(argc, argv, "nav_client");
MoveBaseClient ac("move_base", true);
// 它的作用是等待动作服务器启动,并返回一个布尔值。
// 如果服务器在指定的时间内(由 ros::Duration 设置)启动,函数返回 true。
// 如果超时未启动,函数返回 false。
while(!ac.waitForServer(ros::Duration(5.0))){
ROS_INFO("Waiting for the move_base action server to come up");
}
move_base_msgs::MoveBaseGoal goal;
goal.target_pose.header.frame_id = "map";
goal.target_pose.header.stamp = ros::Time::now();
goal.target_pose.pose.position.x = -3.0;
goal.target_pose.pose.position.y = 1.0;
goal.target_pose.pose.orientation.w = 1;
ROS_INFO("Sending goal");
ac.sendGoal(goal);
ac.waitForResult();
if(ac.getState() == actionlib::SimpleClientGoalState::SUCCEEDED)
ROS_INFO("complete mission");
else
ROS_INFO("failed mission");
}
- 创建动作客户端
- 等待动作服务器启动
- 定义目标点位置和姿态
- 发送目标点到服务器
- 等待返回结果
- 检查结果状态
roslaunch wpr_simulation wpb_stage_robocup.launch
roslaunch nav_pkg nav.launch
rosrun nav_pkg nav_client
#! /usr/bin/env python3
# coding: utf-8
import rospy
import actionlib
from move_base_msgs.msg import MoveBaseAction, MoveBaseGoal
if __name__ == '__main__':
rospy.init_node('nav_client')
ac = actionlib.SimpleActionClient('move_base', MoveBaseAction)
ac.wait_for_server()
goal = MoveBaseGoal()
goal.target_pose.header.frame_id = "map"
goal.target_pose.header.stamp = rospy.Time.now()
goal.target_pose.pose.position.x = -3.0
goal.target_pose.pose.position.y = 1.0
goal.target_pose.pose.orientation.w = 1.0
ac.send_goal(goal)
rospy.loginfo("send goal")
ac.wait_for_result()
if ac.get_state()==actionlib.GoalStatus.SUCCEEDED:
rospy.loginfo("goal reached")
else:
rospy.loginfo("goal failed")
导航插件
git clone https://github.com/6-robot/waterplus_map_tools.git
设置导航目标点
roslaunch waterplus_map_tools add_waypoint_simulation.launch
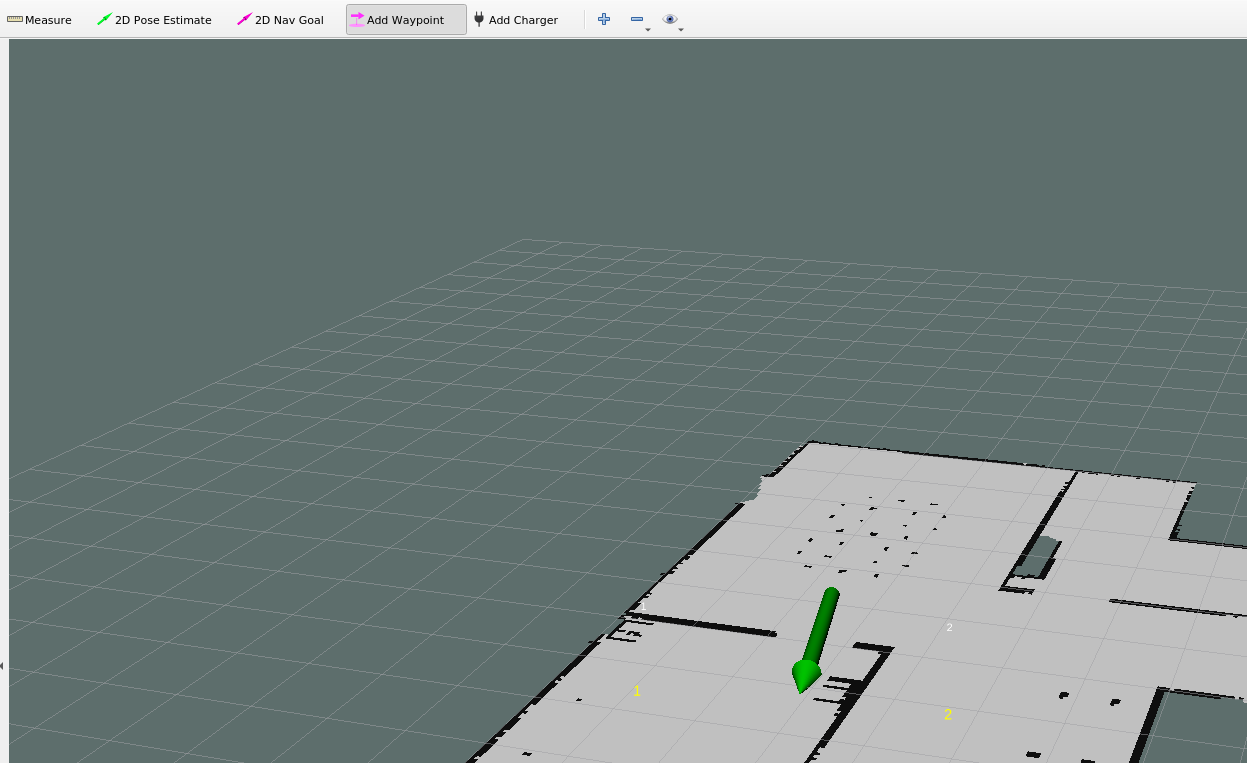
直接在地图上画出导航点
保存导航点
rosrun waterplus_map_tools wp_saver
启动环境
roslaunch wpr_simulation wpb_map_tool.launch
开始导航到设置的目标位置(会导航到设置的第一个目标点)
rosrun wpr_simulation demo_map_tool
如果要修改导航点再重新导航,重复上述步骤,其中在打开导航地图里移动导航点就行
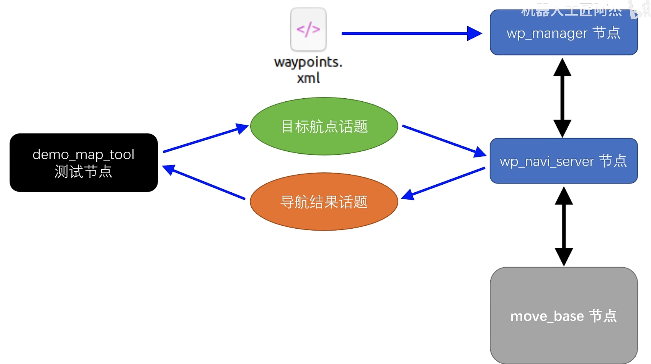
导航插件集成
roslaunch wpr_simulation wpb_stage_robocup.launch
roslaunch nav_pkg nav.launch
rosrun wpr_simulation demo_map_tool
- wp_manager:
功能:wp_manager 节点负责管理航点(waypoints),它从 waypoints.xml 文件中读取航点数据,然后发给wp_navi_server,wp_navi_server存储好航点信息,但没有开始导航,要等目标导航话题出现航点信息然后和wp_manager 发送给wp_navi_server后wp_navi_server存储好的航点信息比对来进行导航 - wp_navi_server:
功能:wp_navi_server 节点负责处理导航任务,它订阅“目标航点话题”,接收目标航点信息,然后给move_base来导航,并通过“导航结果话题”发布导航结果。
<launch>
<!--- Run move_base -->
<node pkg="move_base" type="move_base" name="move_base">
<rosparam file="$(find wpb_home_tutorials)/nav_lidar/costmap_common_params.yaml" command="load" ns="global_costmap" />
<rosparam file="$(find wpb_home_tutorials)/nav_lidar/costmap_common_params.yaml" command="load" ns="local_costmap" />
<rosparam file="$(find wpb_home_tutorials)/nav_lidar/global_costmap_params.yaml" command="load" />
<rosparam file="$(find wpb_home_tutorials)/nav_lidar/local_costmap_params.yaml" command="load" />
<param name="base_global_planner" value="global_planner/GlobalPlanner" />
<param name="base_local_planner" value="teb_local_planner/TebLocalPlannerROS" />
<rosparam file="$(find wpb_home_tutorials)/nav_lidar/teb_local_planner_params.yaml" command="load" />
</node>
<!-- Run map server -->
<node pkg="map_server" type="map_server" name="map_server" args="$(find wpr_simulation)/maps/map.yaml"/>
<!--- Run AMCL -->
<node pkg="amcl" type="amcl" name="amcl"/>
<node name="rviz" pkg="rviz" type="rviz" args="-d $(find nav_pkg)/rviz/map_tool.rviz"/>
<node pkg="waterplus_map_tools" type="wp_navi_server" name="wp_navi_server" output="screen"/>
<node pkg="waterplus_map_tools" type="wp_manager" name="wp_manager" output="screen"/>
</launch>
roslaunch wpr_simulation wpb_stage_robocup.launch
roslaunch nav_pkg nav.launch
rosrun nav_pkg wp_node


















 3925
3925

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











