






安装好ROS2和Gazebo后,意外发现tf-tree竟然没有默认安装。于是手动安装:
sudo apt-get install ros-humble-rqt-tf-tree
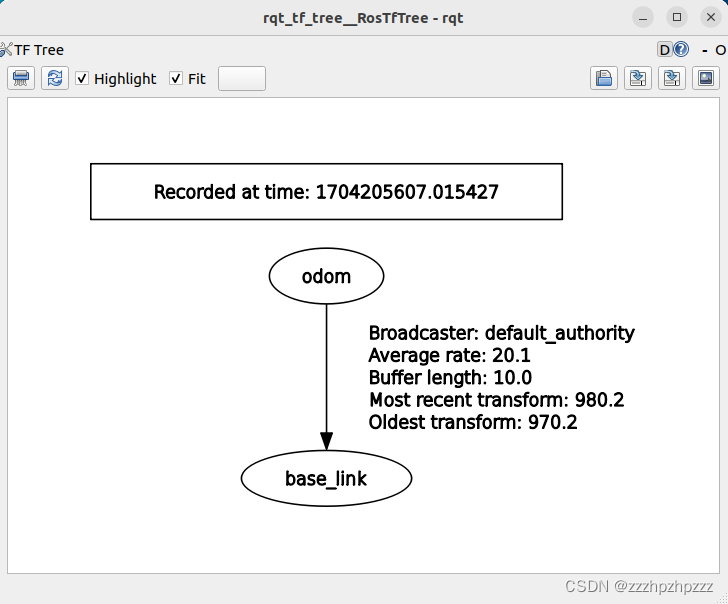
启动tf-tree
ros2 run rqt_tf_tree rqt_tf_tree --force-discover
窗口:

安装好ROS2和Gazebo后,意外发现tf-tree竟然没有默认安装。于是手动安装:
sudo apt-get install ros-humble-rqt-tf-tree
启动tf-tree
ros2 run rqt_tf_tree rqt_tf_tree --force-discover
窗口:
 6242
1248
866
6242
1248
866

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


























