




 本文介绍了在Gazebo中使用IMU、接触和Lidar传感器,以及如何通过gzlaunch一次性启动多个任务,如机器人运动和数据收集,以实现避障功能。
本文介绍了在Gazebo中使用IMU、接触和Lidar传感器,以及如何通过gzlaunch一次性启动多个任务,如机器人运动和数据收集,以实现避障功能。
传感器
注意: 本教程是在Gazebo Garden中使创建好的机器人动起来教程的延续。
在本教程中,我们将学习如何向我们的机器人和世界中的其他模型添加传感器。我们将使用三种不同的传感器:IMU 传感器、接触传感器和Lidar传感器。我们还将学习如何使用 gz launch 仅用一个文件启动多个任务。
IMU传感器
惯性测量单元(IMU)以四元数的形式输出机器人的方向,以及三个轴(X、Y、Z)的角速度和线加速度。我们使用 moving_robot.sdf 世界并对其进行修改。创建一个新文件 sensor_tutorial.sdf,并将 moving_robot.sdf 中的代码添加到其中。要定义 IMU 传感器,请在<world>标签下添加以下代码:
<plugin filename="gz-sim-imu-system"
name="gz::sim::systems::Imu">
</plugin>
这段代码定义了将在我们的世界中使用的 IMU 传感器插件。现在我们可以按以下方式将 IMU 传感器添加到我们的机器人中:
<sensor name="imu_sensor" type="imu">
<always_on>1</always_on>
<update_rate>1</update_rate>
<visualize>true</visualize>
<topic>imu</topic>
</sensor>
传感器通常添加到我们模型的某个链接中;我们将其添加到chassis链接下。
让我们描述一下这些标签:
<always_on>如果为 true,则传感器将始终根据更新率进行更新。<update_rate>生成传感器数据的频率。<visualize>如果为 true,则传感器将在 GUI 中可视化。<topic>发布数据的主题名称。
注意: 并非任意标签都支持所有传感器。
从IMU读取数据
要从 IMU 读取数据,请在一个终端中运行世界并按下播放按钮:
gz sim sensor_tutorial.sdf
在另一个终端中,运行:
gz topic -e -t /imu
最后一个命令监听通过 /imu 主题发送的消息。IMU 数据是如上所述的方向、角速度和线加速度。它看起来应该像这样:
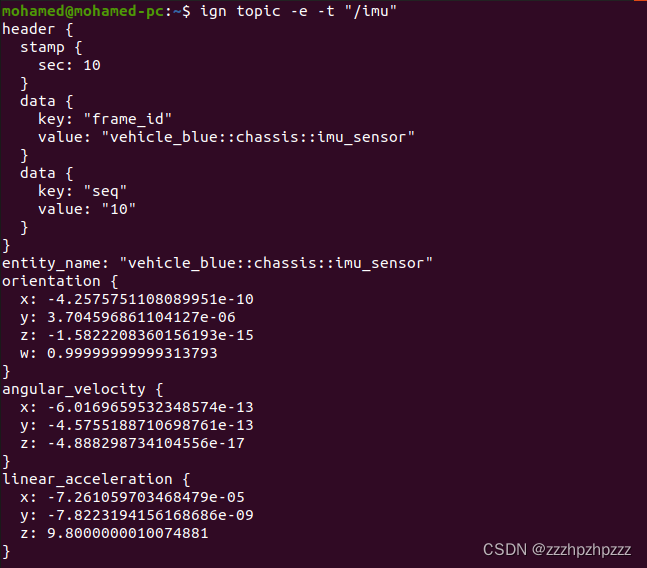
使用键盘上的向上键向前移动机器人。你应该能看到传感器值发生变化。
接触传感器
让我们介绍另一种类型的传感器,接触传感器。从名称中你可以猜出,当它接触(接触)其他东西时,这个传感器会发出指示。我们将建造一个障碍物(墙)并将接触传感器添加到其中。如果机器人撞到障碍物,它将停止,以防止机器人损坏。让我们首先按照以下方式建造障碍物:
<model name='wall'>
<static>true</static>
<pose>5 0 0 0 0 0</pose><!--pose relative to the world-->
<link name='box'>
<visual name='visual'>
<geometry>
<box>
<size>0.5 10.0 2.0</size>
</box>
</geometry>
<!--let's add color to our link-->
<material>
<ambient>0.0 0.0 1.0 1</ambient>
<diffuse>0.0 0.0 1.0 1</diffuse>
<specular>0.0 0.0 1.0 1</specular>
</material>
</visual>
<collision name='collision'>
<geometry>
<box>
<size>0.5 10.0 2.0</size>
</box>
</geometry>
</collision>
</link>
</model>
这只是一个简单的模型,只有一个盒状链接。你可以查看“在Gazebo Garden中创建一个机器人”教程来学习如何构建模型。
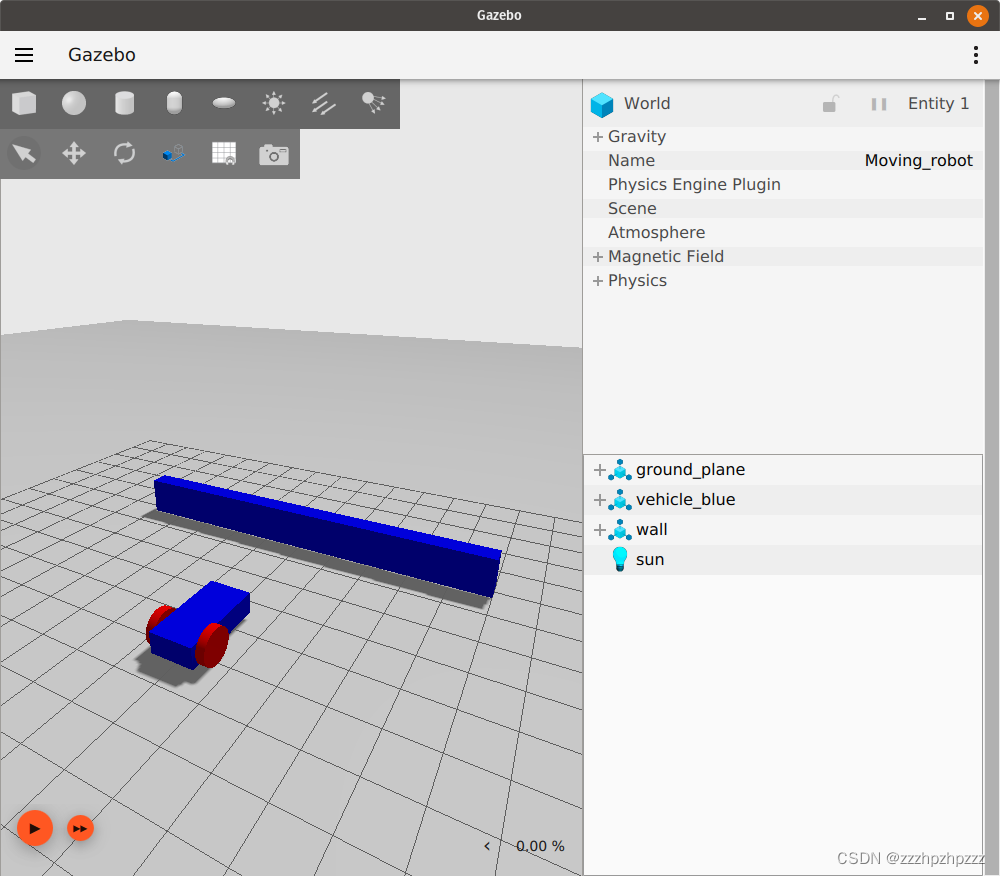
现在运行世界,并确保墙壁像这样出现在模拟中:
让我们将接触传感器添加到墙上。与 IMU 传感器一样,我们首先应该通过添加以下代码来定义接触传感器:
<plugin filename="gz-sim-contact-system"
name="gz::sim::systems::Contact">
</plugin>
现在我们可以将contact传感器添加到wall模型的box链接中:
<sensor name='sensor_contact' type='contact'>
<contact>
<collision>collision</collision>
</contact>
</sensor>
<sensor>的定义很简单,我们只定义了传感器的名称和类型。在collision内部,我们定义了box链接的碰撞的名称,即collision。
我们还需要在墙壁模型下添加 TouchPlugin,如下所示:
<plugin filename="gz-sim-touchplugin-system"
name="gz::sim::systems::TouchPlugin">
<target>vehicle_blue</target>
<namespace>wall</namespace>
<time>0.001</time>
<enabled>true</enabled>
</plugin>
TouchPlugin 将在墙壁被碰触时发布(发送)一条消息。插件的标签如下:
<target>将与我们的墙壁接触,在我们的例子中是 vehicle_blue。<namespace>采用我们的主题的命名空间,因此当我们的机器人撞到墙壁时,它将向 /wall/touched 话题发送一条消息。
在一个终端中运行仿真世界:
gz sim sensor_tutorial.sdf
在另一个终端中,监听 /wall/touched 主题:
gz topic -e -t /wall/touched
使用键盘箭头键将机器人向前驱向墙壁。确保通过点击播放按钮开始仿真,并通过单击插件下拉列表(垂直省略号)启用 Key Publisher 插件。
当机器人撞到障碍物时,你应该在运行 gz topic -e -t /wall/touched 的终端上看到一条消息 data: true。
现在我们可以使用 TriggeredPublisher 插件让我们的机器人在撞到墙壁时停止,如下所示:
<plugin filename="gz-sim-triggered-publisher-system"
name="gz::sim::systems::TriggeredPublisher">
<input type="gz.msgs.Boolean" topic="/wall/touched">
<match>data: true</match>
</input>
<output type="gz.msgs.Twist" topic="/cmd_vel">
linear: {x: 0.0}, angular: {z: 0.0}
</output>
</plugin>
如在Gazebo Garden中使创建好的机器人动起来中所述,我们可以根据接收到的输入发布输出。因此,当我们在 /wall/touched 主题上接收到 data: true 时,我们发布 linear: {x: 0.0}, angular: {z: 0.0} 以使我们的机器人停止。
Lidar传感器
我们不希望机器人碰到墙壁,因为这可能会造成一些损坏,所以我们可以使用激光雷达而不是接触传感器。Lidar是“light detection and ranging(光探测和测距)”的缩写。该传感器可以帮助我们检测机器人周围的障碍物。我们将使用它来测量机器人与墙壁之间的距离。
首先,我们创建一个Frame来固定Lidar。这应该添加到 vehicle_blue 的<model>标记内,因为lidar frame附加在机器人的底盘(chassis)上:
<frame name="lidar_frame" attached_to='chassis'>
<pose>0.8 0 0.5 0 0 0</pose>
</frame>
然后在<world>标签下添加此插件,以便能够使用lidar传感器:
<plugin
filename="gz-sim-sensors-system"
name="gz::sim::systems::Sensors">
<render_engine>ogre2</render_engine>
</plugin>
在chassis链接下,我们可以添加lidar传感器,如下所示:
<sensor name='gpu_lidar' type='gpu_lidar'>"
<pose relative_to='lidar_frame'>0 0 0 0 0 0</pose>
<topic>lidar</topic>
<update_rate>10</update_rate>
<ray>
<scan>
<horizontal>
<samples>640</samples>
<resolution>1</resolution>
<min_angle>-1.396263</min_angle>
<max_angle>1.396263</max_angle>
</horizontal>
<vertical>
<samples>1</samples>
<resolution>0.01</resolution>
<min_angle>0</min_angle>
<max_angle>0</max_angle>
</vertical>
</scan>
<range>
<min>0.08</min>
<max>10.0</max>
<resolution>0.01</resolution>
</range>
</ray>
<always_on>1</always_on>
<visualize>true</visualize>
</sensor>
- 首先,我们定义了传感器的名称和类型,然后定义了它相对于 lidar_frame 的
<pose>。 - 在
<topic>中,我们定义了 lidar 数据将发布的话题。 <update_rate>是 lidar 数据生成的频率,在我们的例子中是 10 Hz,即 0.1 秒。- 在
<horizontal>和<vertical>标签下,我们定义了水平和垂直激光射线的属性。 <samples>是每个完整激光扫射周期生成的模拟 lidar 射线的数量。<resolution>:该数字乘以 samples 来确定数据点的数量范围。<min_angle>和<max_angle>是生成射线的角度范围。- 在
<range>下,我们定义了每个模拟射线的范围属性<min>和<max>定义了每条 lidar 射线的最小和最大距离。<resolution>标签在此处定义了每条 lidar 射线的线性分辨率。
<always_on>:如果为 true,则传感器将根据<update_rate>始终更新。<visualize>:如果为 true,则传感器将在 GUI 中可视化。
现在运行世界并按左下角的播放按钮:
gz sim sensor_tutorial.sdf
查看 lidar 主题上的 lidar 消息,特别是范围数据:
gz topic -e -t /lidar
lidar 消息具有以下属性:
message LaserScan
{
Header header = 1;
string frame = 2;
Pose world_pose = 3;
double angle_min = 4;
double angle_max = 5;
double angle_step = 6;
double range_min = 7;
double range_max = 8;
uint32 count = 9;
double vertical_angle_min = 10;
double vertical_angle_max = 11;
double vertical_angle_step = 12;
uint32 vertical_count = 13;
repeated double ranges = 14;
repeated double intensities = 15;
}
避开墙壁
现在我们的机器人有了激光雷达,我们可以使用范围数据来让我们的机器人避免撞到墙上。为此,我们将编写一个简短的 C++程序,该程序监听传感器数据并向机器人发送速度命令。这个程序被称为节点。我们将构建一个节点,订阅 lidar 话题并读取其数据。看看这个教程,学习如何构建发布者和订阅者节点。你可以从这里下载这个演示的完成节点。
lidar_node节点
gz::transport::Node node;
std::string topic_pub = "/cmd_vel";
gz::msgs::Twist data;
auto pub = node.Advertise<gz::msgs::Twist>(topic_pub);
我们声明一个将发布到 cmd_vel 话题的节点,并定义了消息类型 Twist。然后宣传我们的节点。
void cb(const gz::msgs::LaserScan &_msg)
{
bool allMore = true;
for (int i = 0; i < _msg.ranges_size(); i++)
{
if (_msg.ranges(i) < 1.0)
{
allMore = false;
break;
}
}
if (allMore) //if all bigger than one
{
data.mutable_linear()->set_x(0.5);
data.mutable_angular()->set_z(0.0);
}
else
{
data.mutable_linear()->set_x(0.0);
data.mutable_angular()->set_z(0.5);
}
pub.Publish(data);
}
在回调函数内部,我们检查所有射线的范围是否大于 1.0。如果是这样,我们将向机器人发布一个前进的消息。否则,让机器人旋转。
int main(int argc, char **argv)
{
std::string topic = "/lidar";
// Subscribe to a topic by registering a callback.
if (!node.Subscribe(topic, cb))
{
std::cerr << "Error subscribing to topic [" << topic << "]" << std::endl;
return -1;
}
// Zzzzzz.
gz::transport::waitForShutdown();
return 0;
}
在 main 内部,我们订阅 lidar 话题,并等待节点关闭。
构建节点
下载 CMakeLists.txt,并在 lidar_node 所在的同一文件夹中创建 build/ 目录:
mkdir build
cd build
执行cmka命令并构建:
cmake ..
make lidar_node
运行代码
在终端1运行节点:
./build/lidar_node
在终端2执行:
gz sim sensor_tutorial.sdf
现在你可以看到机器人向前移动,当它接近墙壁时,它开始向左转动,直到它清除并再次向前移动(确保按下左下角的播放按钮以使机器人开始移动)。
启动Gazebo
与其从两个不同的终端运行两个不同的任务,我们可以制作一个启动文件,同时运行 sensor_world 和 lidar_node。打开你的文本编辑器并添加以下代码。
<?xml version='1.0'?>
<gz version='1.0'>
<executable name='sensor-world'>
<command>gz sim sensor_tutorial.sdf</command>
</executable>
<executable name='lidar_node'>
<command>./build/lidar_node</command>
</executable>
</gz>
启动文件是一个 XML 文件。我们只需在<executable>标签下定义将运行的命令。第一个命令是 gz sim sensor_tutorial.sdf,它启动仿真世界。第二个命令是 ./build/lidar_node,它运行 lidar_node。将文件保存为 sensor_launch.gzlaunch,然后通过以下命令运行它:
gz launch sensor_launch.gzlaunch
按播放按钮开始模拟。我们的机器人现在正在移动并避开墙壁。
要使仿真更加复杂,请在下一个教程中学习如何向仿真世界添加演员。

















 1149
1149

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









