






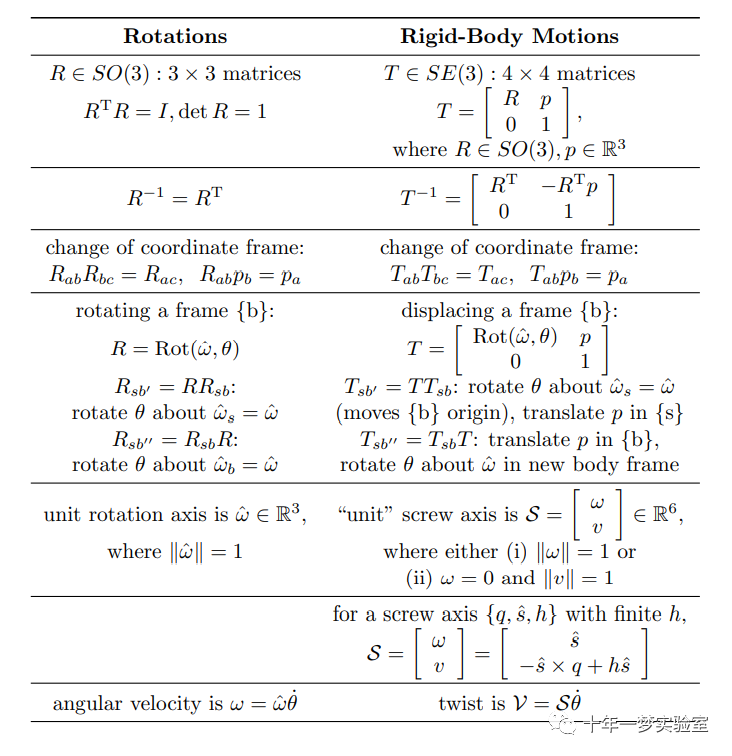
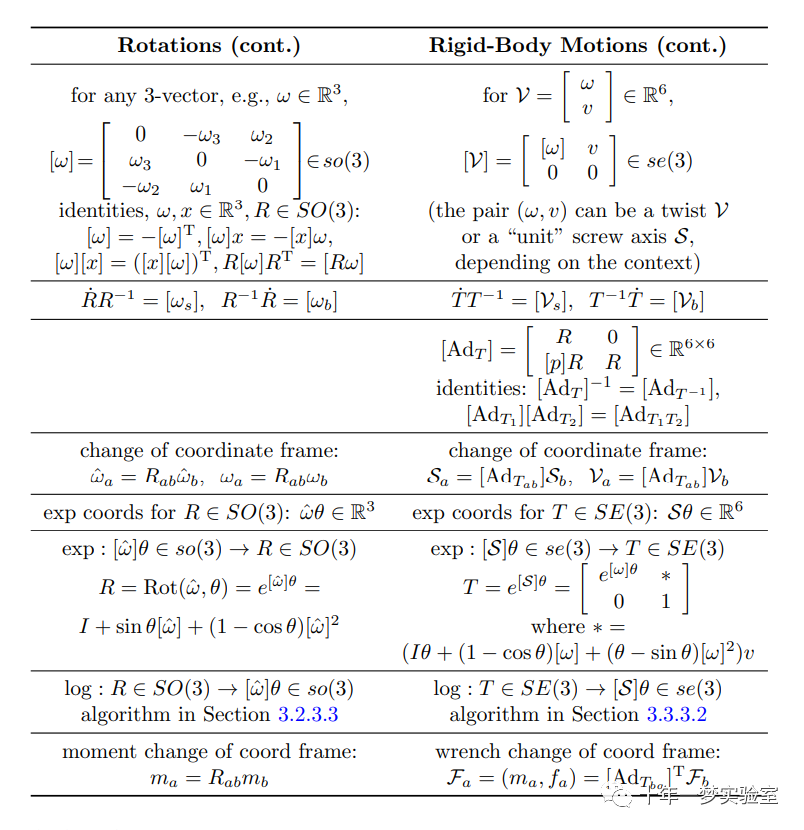
一、本章小结
下表简要总结了本章的一些关键概念,以及旋转和刚体运动之间的对比。有关更多详细信息,请参阅本章的相应部分。
二、软件
本书随附的软件发布中包含以下功能。下面的代码是 MATLAB 格式,但也有其他语言版本。有关该软件的更多详细信息,请参阅代码及其文档。
invR = RotInv(R)
计算旋转矩阵 R 的逆矩阵。
so3mat = VecToso3(omg)
返回对应于 omg 的 3 × 3 反对称矩阵。
omg = so3ToVec(so3mat)
返回对应于 3×3 反对称矩阵 so3mat 的 3 向量。
[omghat,theta] = AxisAng3(expc3)
从旋转的指数坐标expc3的三维向量 ˆωθ 中提取旋转轴 ˆω 和旋转角 θ。
R = MatrixExp3(so3mat)
计算矩阵指数so3mat∈so(3)对一个的旋转矩阵R∈SO(3)
so3mat = MatrixLog3(R)
计算旋转矩阵R对应的矩阵对数so3mat∈so(3)
T = RpToTrans(R,p)
构造旋转矩阵R和位置矢量p对应的齐次变换矩阵T。
[R,p] = TransToRp(T)
从齐次变换矩阵T中提取出旋转矩阵和位置矢量。
invT = TransInv(T)
计算齐次变换矩阵T的逆矩阵。
se3mat = VecTose3(V)
返回6维矢量 旋量V对应的 se(3)的矩阵形式。
V = se3ToVec(se3mat)
返回se(3)矩阵se3mat 对应 6维矢量的旋量。
AdT = Adjoint(T)
计算齐次变换矩阵T的6X6伴随变换矩阵
S = ScrewToAxis(q,s,h)
返回归一化螺旋轴形式 S,由 在螺旋轴方向上的单位矢量s ,轴外一点 q 处,螺距为 h,描述的螺旋。
[S,theta] = AxisAng6(expc6)
从指数坐标 Sθ 的 6 向量中提取归一化的螺旋轴 S 和沿螺旋轴运动的 θ距离 。
T = MatrixExp6(se3mat)
计算与 se3mat ∈ se(3) 的矩阵指数对应的齐次变换矩阵 T ∈ SE(3)。
se3mat = MatrixLog6(T)
计算齐次变换矩阵 T ∈ SE (3) 的矩阵对数 se3mat ∈ se (3)。
The End

















 86
86

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









