






目标:学习如何使用 tf2 获取帧变换。
教程级别:中级
时间:10 分钟
目录
背景
先决条件
任务
1. 编写监听节点
2. 更新启动文件
3. 构建
4. 运行
摘要
背景
在之前的教程中,我们创建了一个 tf2 广播器来发布乌龟的姿态到 tf2。
在本教程中,我们将创建一个 tf2 监听器以开始使用 tf2。
先决条件
本教程假设您已经完成了 tf2 静态广播器教程(Python)和 tf2 广播器教程(Python)。在上一个教程中,我们创建了一个 learning_tf2_py 包,我们将继续在此基础上进行工作。
任务
1. 编写监听节点
让我们首先创建源文件。转到我们在上一个教程中创建的 learning_tf2_py 包。在 src/learning_tf2_py/learning_tf2_py 目录中,通过输入以下命令下载示例监听器代码:
wget https://raw.githubusercontent.com/ros/geometry_tutorials/ros2/turtle_tf2_py/turtle_tf2_py/turtle_tf2_listener.py现在使用您喜欢的文本编辑器打开名为 turtle_tf2_listener.py 的文件。
# 版权 2021 开源机器人基金会,公司。
#
# 根据Apache许可证版本2.0(“许可证”)许可;
# 除非符合许可证,否则不得使用此文件。
# 您可以在以下位置获取许可证副本:
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# 除非适用法律要求或书面同意,否则在许可证下分发的软件
# 将按“原样”基础分发,无任何形式的明示或暗示
# 保证或条件。有关在许可证下管理权限和
# 限制的语言,请参阅许可证。
import math # 导入数学库
from geometry_msgs.msg import Twist # 从geometry_msgs包导入Twist消息
import rclpy # 导入ROS客户端库
from rclpy.node import Node # 从rclpy.node导入Node类
from tf2_ros import TransformException # 从tf2_ros导入TransformException异常
from tf2_ros.buffer import Buffer # 从tf2_ros.buffer导入Buffer类
from tf2_ros.transform_listener import TransformListener # 从tf2_ros.transform_listener导入TransformListener类
from turtlesim.srv import Spawn # 从turtlesim.srv导入Spawn服务
class FrameListener(Node): # 定义FrameListener类,继承自Node类
def __init__(self): # 定义初始化函数
super().__init__('turtle_tf2_frame_listener') # 调用父类初始化函数,设置节点名为'turtle_tf2_frame_listener'
# 声明并获取`target_frame`参数
self.target_frame = self.declare_parameter(
'target_frame', 'turtle1').get_parameter_value().string_value # 声明并获取'target_frame'参数,默认值为'turtle1'
self.tf_buffer = Buffer() # 创建tf缓冲区
self.tf_listener = TransformListener(self.tf_buffer, self) # 创建tf监听器
# 创建一个客户端来生成一个turtle # 在ROS中创建了一个客户端,用于调用名为 'spawn' 的服务。
self.spawner = self.create_client(Spawn, 'spawn') # 创建一个Spawn服务的客户端,服务名为'spawn'
# 布尔值用于存储信息
# 如果生成turtle的服务可用
self.turtle_spawning_service_ready = False # 初始化turtle生成服务状态为不可用
# 如果turtle成功生成
self.turtle_spawned = False # 初始化turtle生成状态为未生成
# 创建turtle2速度发布器
self.publisher = self.create_publisher(Twist, 'turtle2/cmd_vel', 1) # 创建一个Twist消息的发布器,话题名为'turtle2/cmd_vel',QoS设置为1
# 每秒调用一次on_timer函数
self.timer = self.create_timer(1.0, self.on_timer) # 创建一个定时器,每秒调用一次on_timer函数
def on_timer(self): # 定义定时器回调函数
# 将帧名存储在变量中,这些变量将用于
# 计算变换
from_frame_rel = self.target_frame # 设置源帧为目标帧
to_frame_rel = 'turtle2' # 设置目标帧为'turtle2'
if self.turtle_spawning_service_ready: # 如果turtle生成服务可用
if self.turtle_spawned: # 如果turtle已经生成
# 查找目标帧和turtle2帧之间的变换
# 并发送速度命令使turtle2达到目标帧
try:
t = self.tf_buffer.lookup_transform(
to_frame_rel,
from_frame_rel,
rclpy.time.Time()) # 尝试查找目标帧和turtle2帧之间的变换
except TransformException as ex: # 如果查找失败,抛出TransformException异常
self.get_logger().info(
f'无法将 {to_frame_rel} 变换到 {from_frame_rel}: {ex}') # 记录无法进行变换的信息
return # 返回,不执行后续代码
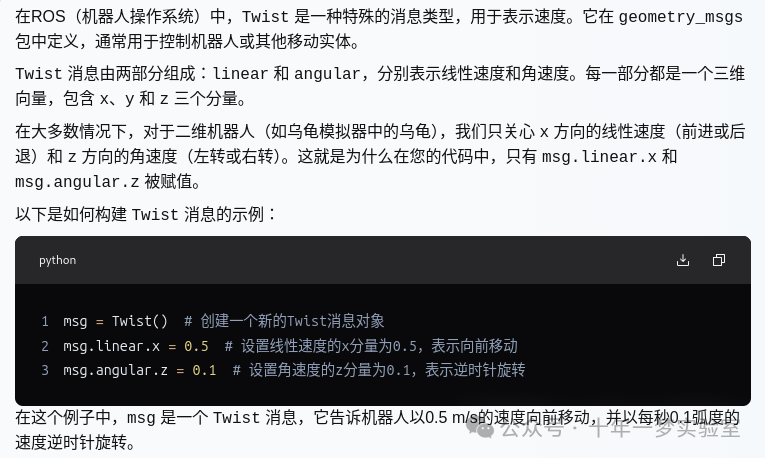
msg = Twist() # 创建一个Twist消息
scale_rotation_rate = 1.0 # 设置旋转速度比例因子
msg.angular.z = scale_rotation_rate * math.atan2(
t.transform.translation.y,
t.transform.translation.x) # 计算并设置z轴的角速度
scale_forward_speed = 0.5 # 设置前进速度比例因子
msg.linear.x = scale_forward_speed * math.sqrt(
t.transform.translation.x ** 2 +
t.transform.translation.y ** 2) # 计算并设置x轴的线速度
self.publisher.publish(msg) # 发布Twist消息
else: # 如果turtle未生成
if self.result.done(): # 如果服务调用完成
self.get_logger().info(
f'成功生成 {self.result.result().name}') # 记录成功生成turtle的信息
self.turtle_spawned = True # 设置turtle生成状态为已生成
else: # 如果服务调用未完成
self.get_logger().info('生成未完成') # 记录生成未完成的信息
else: # 如果turtle生成服务不可用
if self.spawner.service_is_ready(): # 如果服务可用
# 使用turtle名和坐标初始化请求
# 注意在turtlesim/srv/Spawn中,x、y和theta被定义为浮点数
request = Spawn.Request() # 创建一个Spawn请求
request.name = 'turtle2' # 设置turtle名为'turtle2'
request.x = 4.0 # 设置turtle的x坐标为4.0
request.y = 2.0 # 设置turtle的y坐标为2.0
request.theta = 0.0 # 设置turtle的theta值为0.0
# 调用请求
self.result = self.spawner.call_async(request) # 异步调用服务,发送请求
self.turtle_spawning_service_ready = True # 设置turtle生成服务状态为可用
else: # 如果服务不可用
# 检查服务是否准备好
self.get_logger().info('服务未准备好') # 记录服务未准备好的信息
def main(): # 定义主函数
rclpy.init() # 初始化ROS客户端库
node = FrameListener() # 创建一个FrameListener节点
try:
rclpy.spin(node) # 让节点保持运行,处理回调函数
except KeyboardInterrupt: # 如果收到键盘中断信号
pass # 不做任何操作
rclpy.shutdown() # 关闭ROS客户端库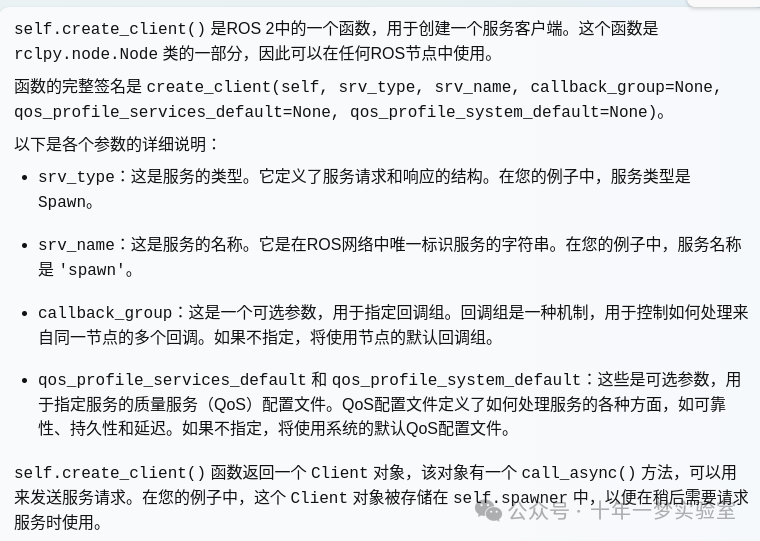
1.1 检查代码
要了解生成海龟服务背后的工作原理,请参阅编写一个简单的服务和客户端(Python)教程 https://docs.ros.org/en/jazzy/Tutorials/Beginner-Client-Libraries/Writing-A-Simple-Py-Service-And-Client.html 。
现在,让我们来看一下与获取帧转换相关的代码。 tf2_ros 包提供了一个 TransformListener 的实现,以帮助简化接收转换的任务。
from tf2_ros.transform_listener import TransformListener在这里,我们创建一个 TransformListener 对象。监听器创建后,它开始通过网络接收 tf2 变换,并将它们缓冲最多 10 秒。
self.tf_listener = TransformListener(self.tf_buffer, self)最后,我们查询监听器以获取特定转换。我们调用 lookup_transform 方法,传入以下参数:
目标框架
来源框架
我们想要转变的时间
提供 rclpy.time.Time() 将只会得到最新可用的转换。所有这些都包装在一个 try-except 块中,以处理可能的异常。
t = self.tf_buffer.lookup_transform(
to_frame_rel,
from_frame_rel,
rclpy.time.Time())1.2 添加一个入口点
要允许 ros2 run 命令运行您的节点,您必须将入口点添加到 setup.py (位于 src/learning_tf2_py 目录中)。
在 'console_scripts': 括号之间添加以下行:
'turtle_tf2_listener = learning_tf2_py.turtle_tf2_listener:main',2. 更新启动文件
打开位于 src/learning_tf2_py/launch 目录中名为 turtle_tf2_demo_launch.py 的启动文件,用你的文本编辑器,向启动描述中添加两个新节点,添加一个启动参数,并添加导入。结果文件应该看起来像:
from launch import LaunchDescription # 从launch包导入LaunchDescription类
from launch.actions import DeclareLaunchArgument # 从launch.actions导入DeclareLaunchArgument类
from launch.substitutions import LaunchConfiguration # 从launch.substitutions导入LaunchConfiguration类
from launch_ros.actions import Node # 从launch_ros.actions导入Node类
def generate_launch_description(): # 定义generate_launch_description函数
return LaunchDescription([ # 返回一个LaunchDescription对象
Node( # 创建一个Node对象
package='turtlesim', # 设置包名为'turtlesim'
executable='turtlesim_node', # 设置可执行文件名为'turtlesim_node'
name='sim' # 设置节点名为'sim'
),
Node( # 创建一个Node对象
package='learning_tf2_py', # 设置包名为'learning_tf2_py'
executable='turtle_tf2_broadcaster', # 设置可执行文件名为'turtle_tf2_broadcaster'
name='broadcaster1', # 设置节点名为'broadcaster1'
parameters=[ # 设置参数
{'turtlename': 'turtle1'} # 设置'turtlename'参数为'turtle1'
]
),
DeclareLaunchArgument( # 创建一个DeclareLaunchArgument对象
'target_frame', default_value='turtle1', # 设置参数名为'target_frame',默认值为'turtle1'
description='Target frame name.' # 设置参数描述为'Target frame name.'
),
Node( # 创建一个Node对象
package='learning_tf2_py', # 设置包名为'learning_tf2_py'
executable='turtle_tf2_broadcaster', # 设置可执行文件名为'turtle_tf2_broadcaster'
name='broadcaster2', # 设置节点名为'broadcaster2'
parameters=[ # 设置参数
{'turtlename': 'turtle2'} # 设置'turtlename'参数为'turtle2'
]
),
Node( # 创建一个Node对象
package='learning_tf2_py', # 设置包名为'learning_tf2_py'
executable='turtle_tf2_listener', # 设置可执行文件名为'turtle_tf2_listener'
name='listener', # 设置节点名为'listener'
parameters=[ # 设置参数
{'target_frame': LaunchConfiguration('target_frame')} # 设置'target_frame'参数为LaunchConfiguration对象,参数名为'target_frame'
]
),
])这将声明一个 target_frame 启动参数,启动第二只乌龟的广播器,我们将生成这只乌龟,并启动一个监听器来订阅那些变换。
3.构建
在工作区的根目录运行 rosdep 以检查缺失的依赖项。
rosdep install -i --from-path src --rosdistro jazzy -y仍在工作区的根目录下,构建您的包:
colcon build --packages-select learning_tf2_py打开一个新的终端,导航到工作区的根目录,然后加载设置文件:
. install/setup.bash4. 运行
现在您已准备好开始完整的海龟演示:
ros2 launch learning_tf2_py turtle_tf2_demo_launch.py
您应该看到有两只乌龟的 turtle sim。在第二个终端窗口中输入以下命令:
ros2 run turtlesim turtle_teleop_key要查看事物是否正常工作,只需使用箭头键驾驶第一只乌龟(确保您的终端窗口处于活动状态,而不是您的模拟器窗口),您会看到第二只乌龟跟随第一只乌龟!
摘要
在本教程中,您学习了如何使用 tf2 来获取帧变换的访问权限。您还完成了编写您在 tf2 教程https://docs.ros.org/en/jazzy/Tutorials/Intermediate/Tf2/Introduction-To-Tf2.html 介绍中首次尝试的 turtlesim 演示。

















 2163
2163

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









