









上午项目还好好的 下午 突然打开失败 之后报这个错误 之后项目启动到93%无法继续启动

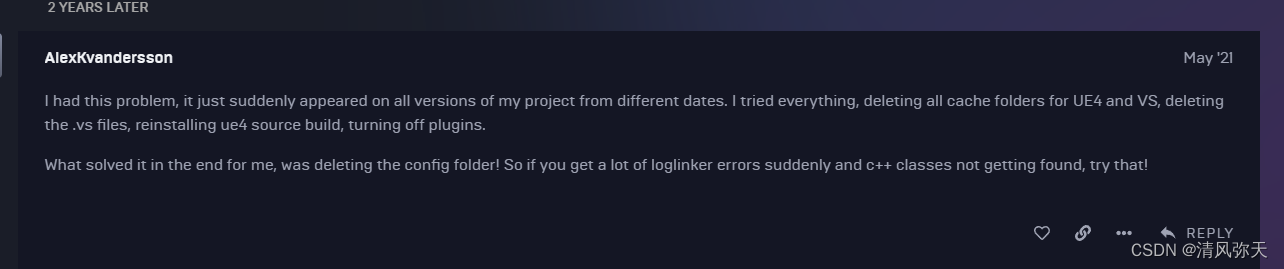
经过删除config文件夹后,就可以打开项目了!
之后重新检测config 把config文件夹内容导入进来!
补充:发现是config文件中的重定向发生了了问题
[CoreRedirects]
+PackageRedirects=(OldName="/Script/OldmodleName", NewName="/Script/NewmodleName")
+ClassRedirects=(OldName="/Script/UAV_Edu_master.Actor",NewName="/Script/UAV_PX_AirSim.Actor")
参考内容:
搜索
复制















 730
730











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









