







3D物体AABB碰撞检测算法
AABB包围盒
在游戏中,为了简化物体之间的碰撞检测运算,通常会对物体创建一个规则的几何外形将其包围。
其中,AABB(axis-aligned bounding box)包围盒被称为轴对其包围盒。
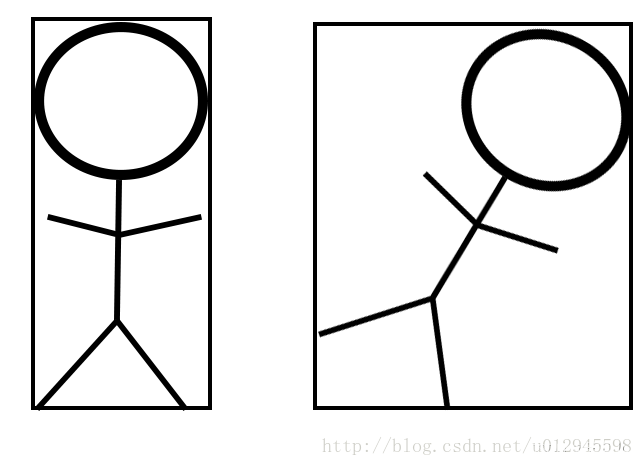
二维场景中的AABB包围盒具备特点:(注:下图中的所有坐标系均采用右手直角坐标系)
- 表现形式为四边形,即用四边形包围物体。
- 四边形的每一条边,都会与坐标系的轴垂直。
如图1-1所示:
三维场景中的AABB包围盒特点:
- 表现形式为六面体。
- 六面体中的每条边都平行于一个坐标平面。
如图1-2所示:
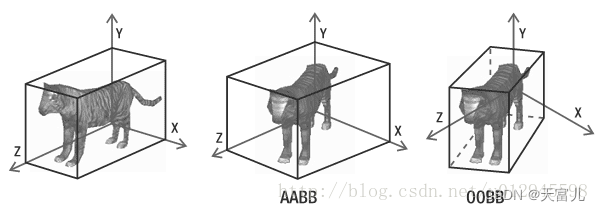
在图1-2中,为了更明显的展示AABB包围盒的特点,在最右侧展示了一个OBB(Oriented Bounding Box)包围盒,也称作有向包围盒。
可以看出,AABB包围盒与OBB包围盒的最直接的区别就是,AABB包围盒是不可以旋转的,而OBB包围盒是可以旋转的,也就是有向的。
二维场景中的AABB碰撞检测原理
首先来看一张二维场景中的物体碰撞图:
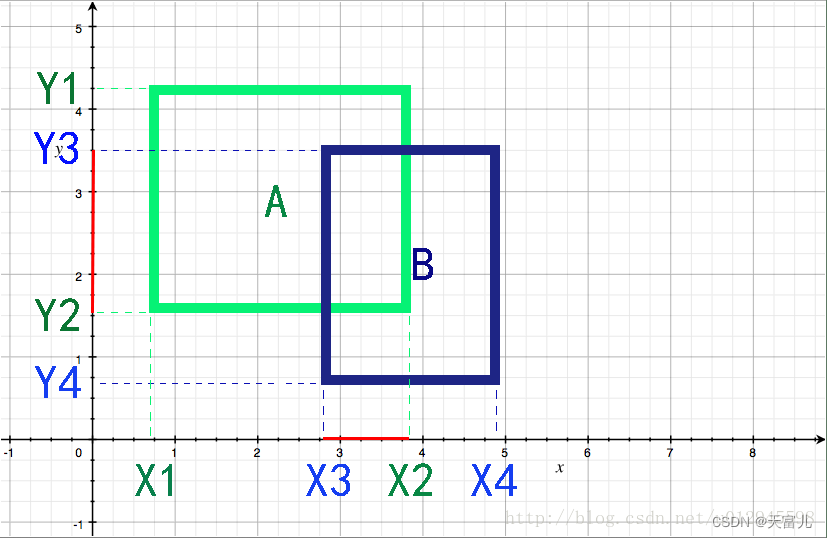
在图 2-1中,分别做物体A与物体B在X,Y轴方向的投影,物体A的Y轴方向最大点坐标为Y1,最小点坐标Y2,X轴方向最小点坐标X1,最大点坐标X2,物体B同理。
图中红色区域为物体A与物体B投影的重叠部分。
可以看出,AABB碰撞检测具有如下规则:
物体A与物体B分别沿两个坐标轴做投影,只有在两个坐标轴都发生重叠的情况下,两个物体才意味着发生了碰撞。
所以,在程序中做二维游戏的AABB碰撞检测时,只需验证物体A与物体B是否满足如下条件:
- 物体A的Y轴方向最小值大于物体B的Y轴方向最大值;
- 物体A的X轴方向最小值大于物体B的X轴方向最大值;
- 物体B的Y轴方向最小值大于物体A的Y轴方向最大值;
- 物体B的X轴方向最小值大于物体A的X轴方向最大值;
若满足上述条件,则证明物体A与物体B并未发生重合,反之,则证明物体A与物体B重合。
三维场景中的AABB碰撞检测原理
首先,再来看一下图2-1中的二维物体A和物体B的包围盒,可以发现实际上判断物体A与物体B是否发生重合只需要知道两个信息:
- 物体A的最小点的信息,即图2-1中A的左下角点;以及物体A的最大点的信息,即图2-1中A的右上角点。
- 物体B的最小点的信息,物体B的最大点的信息。
也就是说在二维场景的碰撞检测中,每个物体的顶点坐标信息都可以由两个坐标来确定,即两个坐标就可以标识一个物体了,所以两个物体的碰撞检测只需要获得到四个点坐标就可以了。
之前在图1-2中已经看到,三维场景中物体的AABB包围盒是一个六面体,其坐标系对于二维坐标系来讲只是多了一个Z轴,所以实际上在三维场景中物体的AABB碰撞检测依然可以采用四个点信息的判定来实现。即从物体A的八个顶点与物体B的八个顶点分别选出两个最大与最小的顶点进行对比。三维物体的AABB包围盒的八个顶点依旧可以用两个顶点来标识,如图 3-1 所示:
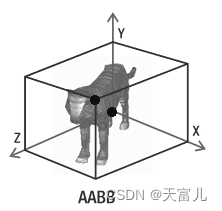
只要确定了图中黑色点部分的坐标,就可以确定八个顶点的全部信息了。
总结
最后,AABB碰见庄策算法虽然计算方法简单,速度快,但是仅适用于精度不搞的游戏中。相对于AABB碰撞检测,还有一种更逼近物体并更为精确的一种算法——OBB碰撞检测。
原文链接:http://www.it165.net/pro/html/201409/22717.html

















 8785
8785

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









