







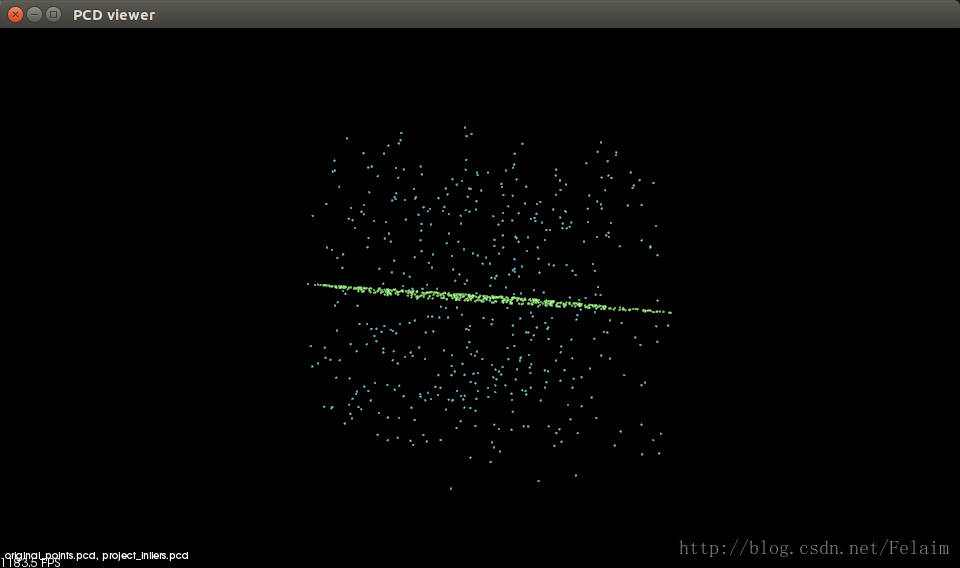
这个程序是将点云投影到一个参数模型上(例如:球形, 或者是平面上),假如是平面的话,通过给定coefficients,就可以了,代码具体如下:
#include <iostream>
#include <pcl/io/pcd_io.h>
#include <pcl/point_types.h>
#include <pcl/ModelCoefficients.h>
#include <pcl/filters/project_inliers.h>
#include <pcl/filters/extract_indices.h>
int main(int argc, char **argv) {
std::cout << "Hello, world!" << std::endl;
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud (new pcl::PointCloud<pcl::PointXYZ>);
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_projected (new pcl::PointCloud<pcl::PointXYZ>);
cloud->width = 500;
cloud->height = 1;
cloud->points.resize(cloud->width * cloud->height);
for(size_t i = 0; i < cloud->points.size(); ++i )
{
cloud->points[i].x = 1024 * rand() / (RAND_MAX + 1.0f);
cloud->points[i].y = 1024 * rand() / (RAND_MAX + 1.0f);
cloud->points[i].z = 1024 * rand() / (RAND_MAX + 1.0f);
}
std::cerr << "cloud before projection: " << std::endl;
for(size_t i = 0; i < cloud->points.size(); ++i)
{
std::cerr << " " << cloud->points[i].x << " "
<< cloud->points[i].y << " "<< cloud->points[i].y << " \n";
}
//create a set of planar coefficients with X=Y=0, Z = 1
pcl::ModelCoefficients::Ptr coefficients (new pcl::ModelCoefficients ());
coefficients->values.resize (4);
coefficients->values[0] = coefficients->values[1] = 0;
coefficients->values[2] = 1.0;
coefficients->values[3] = 0;
//create the filtering object
pcl::ProjectInliers<pcl::PointXYZ> proj;
proj.setModelType(pcl::SACMODEL_PLANE);
proj.setInputCloud(cloud);
proj.setModelCoefficients(coefficients);
proj.filter(*cloud_projected);
std::cerr << "cloud after projection: " << std::endl;
for (size_t i = 0; i < cloud_projected->points.size(); ++i)
{
std::cerr << " " << cloud_projected->points[i].x << " "
<< cloud_projected->points[i].y << " "<< cloud_projected->points[i].z << std::endl;;
}
pcl::PCDWriter writer;
writer.write("original_points.pcd", *cloud, false);
writer.write("project_inliers.pcd", *cloud_projected, false);
return 0;
}
最后的结果图














 1036
1036











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









