







机器人 机械臂右手定则
flyfish
图片部分 来自wiki
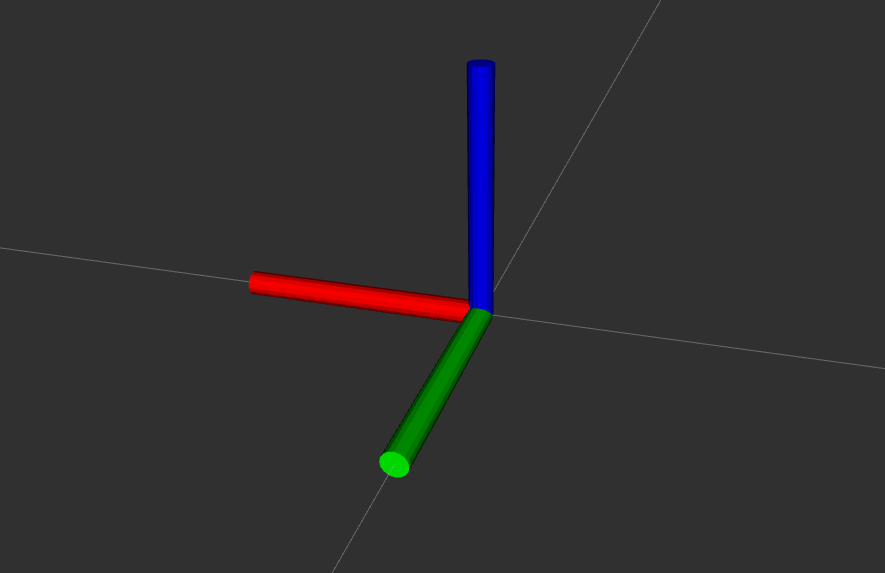
x轴的正方向,红色R
y轴的正方向,绿色G
z轴的正方向,蓝色B
x表示在X轴方向上的平移
y表示在Y轴方向上的平移
z表示在Z轴方向上的平移
rx表示在X轴方向的旋转
ry表示在Y轴方向的旋转
rz表示在Z轴方向的旋转
右手握住的方向是z轴旋转的正方向 (+)
顺序:
平移x,
平移y,
平移z,
旋转rx,
旋转ry,
旋转rz
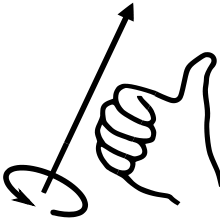
右手定则
食指表示轴
中指表示轴
拇指表示z轴
颜色是RGB。
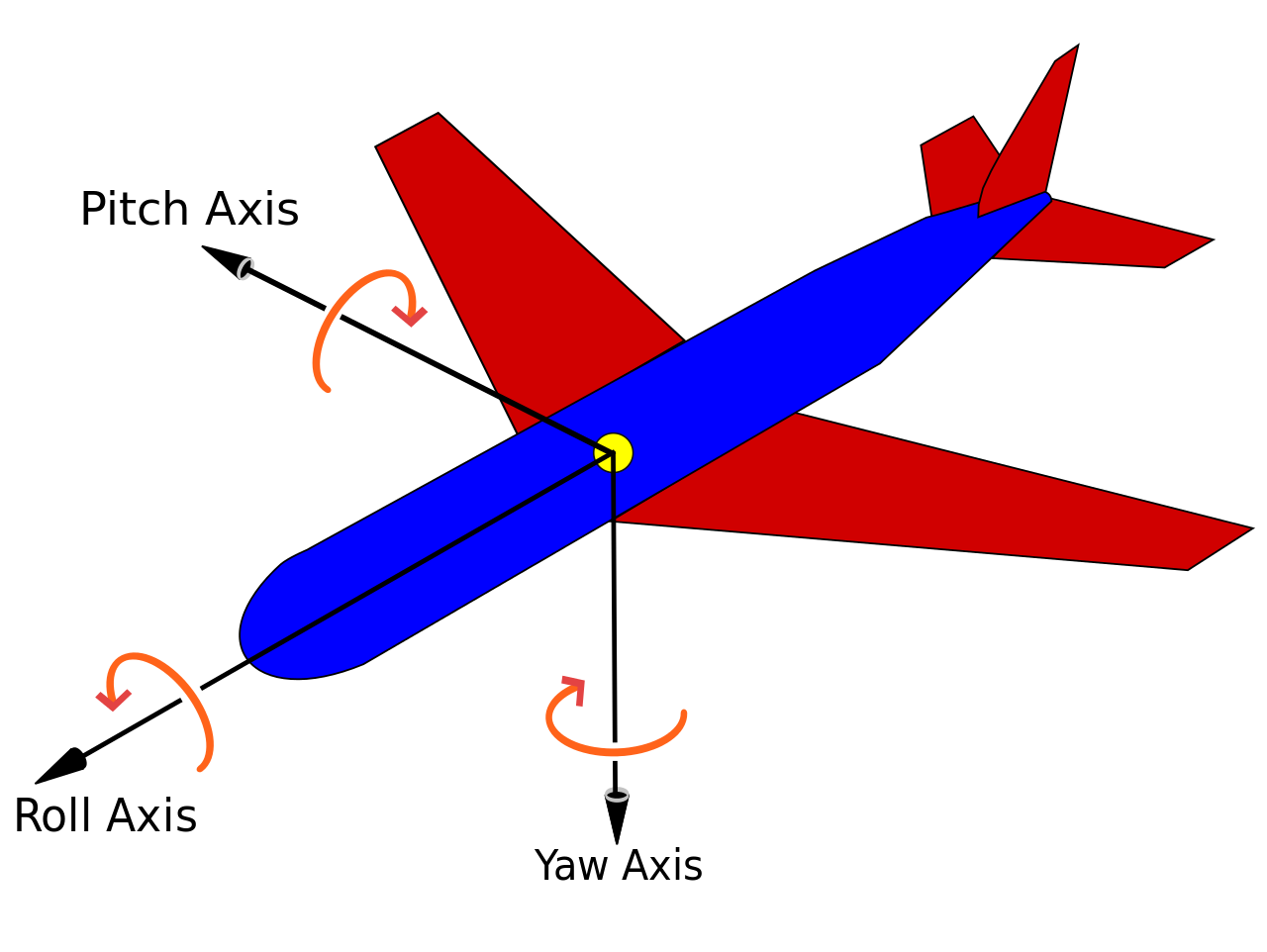
关于旋转
roll表示绕z轴旋转
pitch表示绕y轴旋转
yaw表示绕x轴旋转
来自wiki
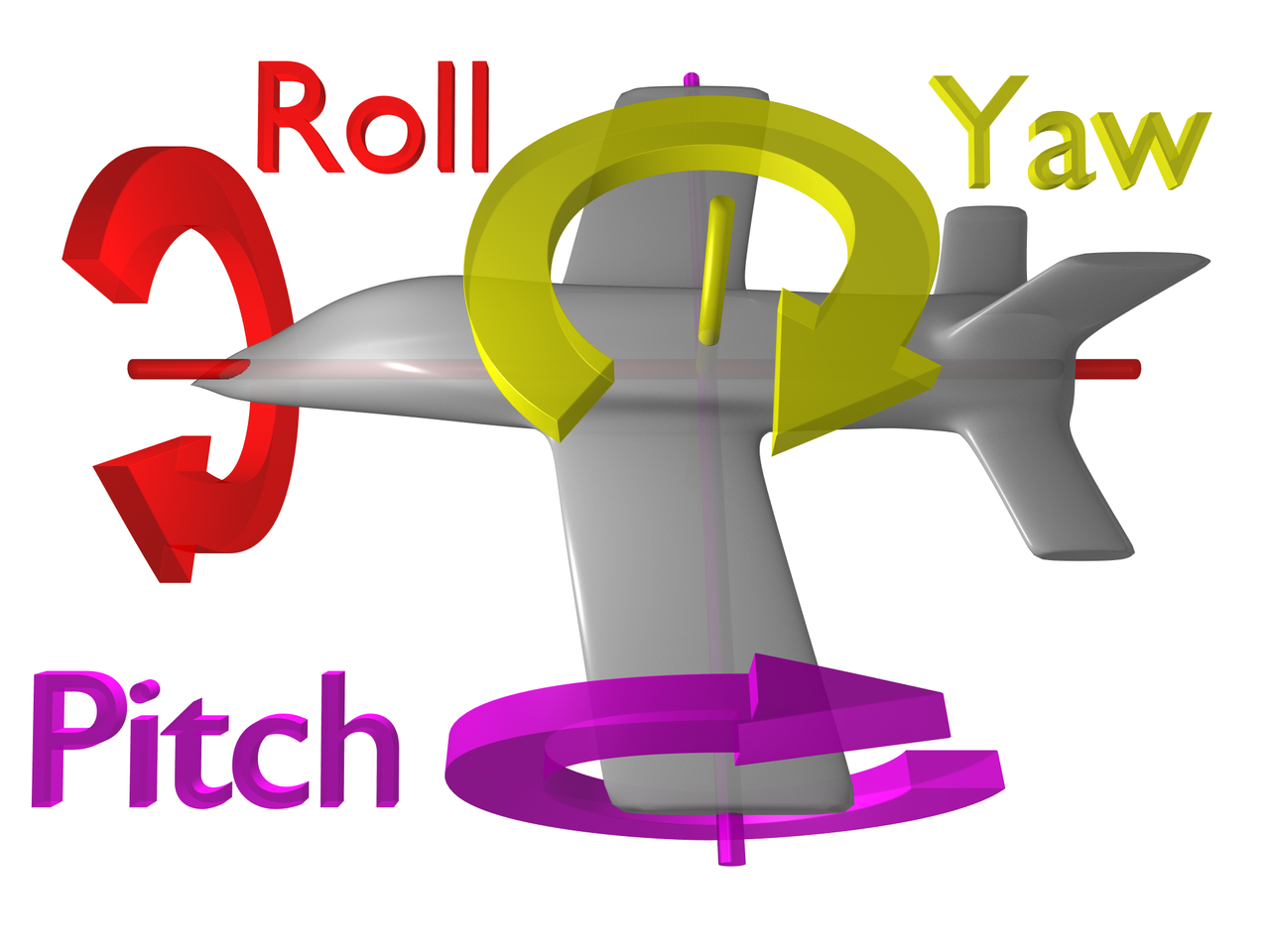
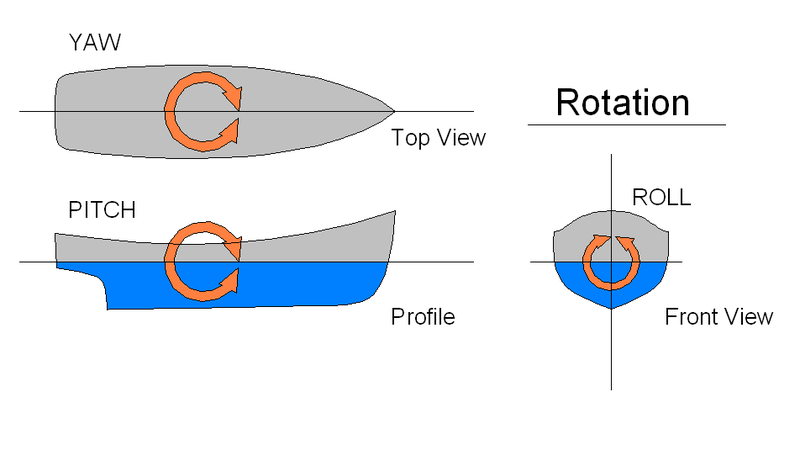
roll

pitch

yaw



















 9859
9859

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











