







收录有关于ros使用过程中遇到rviz2不能正常显示机器人及图像的异常处理。
一.Global Status : Error
如图,启动rviz仿真出现如下图所示:Global Status : Error
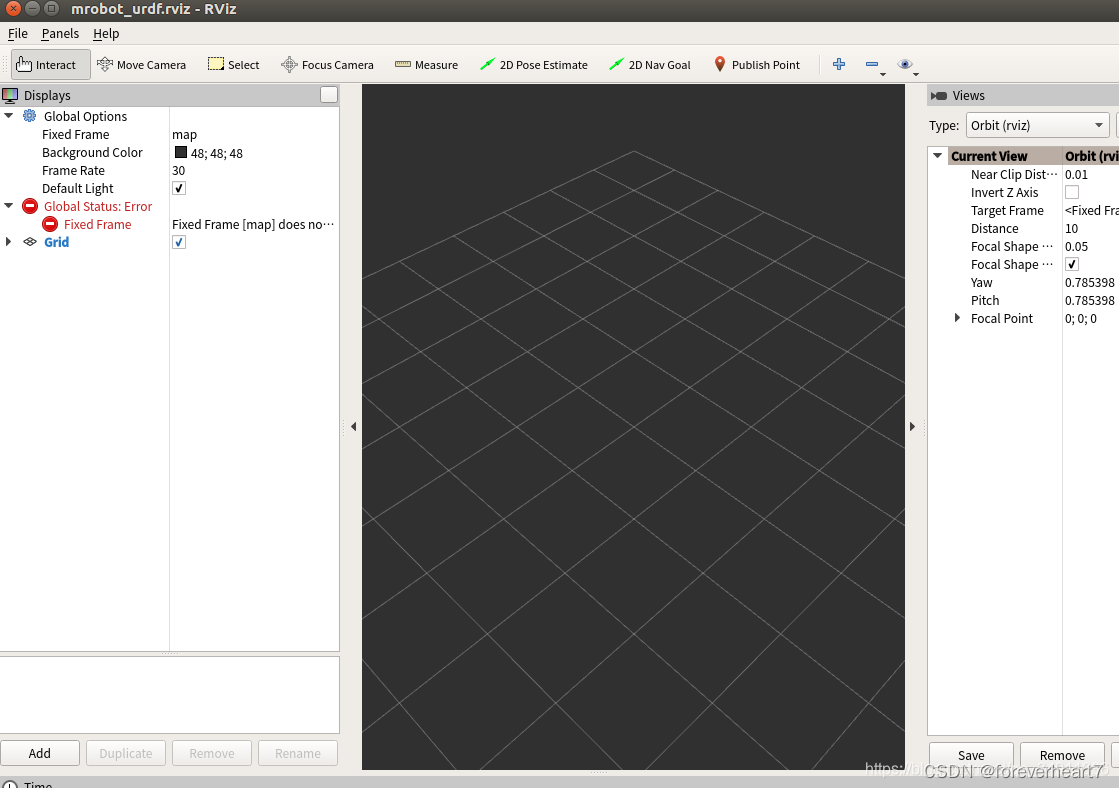
1.1解决方法一:
在rviz界面左上角Fixed Frame 的map选项该改成base_link,如下所示

1.2解决方法二:
打开终端在终端中输入
rosrun tf static_transform_publisher 0 0 0 0 0 0 map base_link 50
1.3解决方法三:
在rviz左下角点击Add按键,出现如下图所示,在弹出的界面中下拉选择RobotModel,然后点击ok,至此问题解决
















 982
982











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









