







http://blog.csdn.net/v1_vivian/article/details/52038037
《Andrew Ng 机器学习笔记》这一系列文章文章是我再观看Andrew Ng的Stanford公开课之后自己整理的一些笔记,除了整理出课件中的主要知识点,另外还有一些自己对课件内容的理解。同时也参考了很多优秀博文,希望大家共同讨论,共同进步。
网易公开课地址:http://open.163.com/special/opencourse/machinelearning.html
本篇博文涉及课程四:牛顿方法
主要内容有:
(1)牛顿法(Newton's Method)
(2)指数分布族
(3)广义线性模型(GLMS) (下篇博文具体分析)
(4)多项式分布 (下篇博文具体分析)
牛顿法
牛顿方法也是对解空间进行搜索。
基本思想:
对于函数f(x),如果我们要找到使得函数值为0的x值时,做法如下:
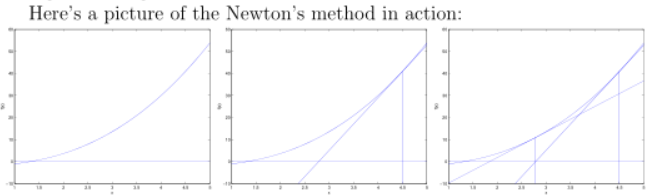
1、随机选一个点(θ0),然后求出该点的切线,即导数。
2、延长它使之与x轴相交,以相交时的x的值(θ1)。
3、重复1、2直到f(x)==0
我们可以得知:其中θ的更新规则为:

对于机器学习问题,我们优化的目标函数为极大似然估计函数,当极大似然估计函数取得最大时,其导数为0。
所以,我们可以使得 ,由此可得:
,由此可得:
,由此可得:

上面是当参数θ为实数时的情况,当参数为向量时,更新规则为:(其中,H是一个n*n的矩阵,n为参数向量的长度,即特征数,H是函数的二阶导数矩阵,被称为Hessian矩阵,此时,用一个表示一阶导数的向量乘上一个表示二阶导数的矩阵的逆,来表达上式中的一阶导数除以二阶导数)
H矩阵中元素Hij计算公式如下:
牛顿方法的优点:
牛顿方法与梯度下降方法功能一样,都是在寻到解空间,但相比较而言,牛顿方法的优点是收敛速度快,通常只要经过十几次迭代就可以达到收敛。牛顿方法也被称为二次收敛,因为当迭代到距离收敛值比较近的时候,每次迭代都能使误差变为原来的平方。
牛顿方法的缺点:
牛顿方法的缺点是当参数向量较大时,每次迭代都需要计算一次Hessian矩阵的逆,比较耗时。
指数分布族
指数分布族是指可以表示为指数形式的概率分布。指数分布族的形式如下:(其中,η称为分布的自然参数(nature parameter);T(y)是充分统计量(sufficient statistic),通常T(y)=y。当参数a、b、T都固定时,就定义了一个以η为参数的函数族):

以将高斯分布和伯努利分布为例,我们将它们表示称为指数分布族的形式。
1.将伯努利分布写成指数分布族的形式
伯努利分布是对0,1问题进行建模的分布,它可以用如下形式表示:

将其转换形式:
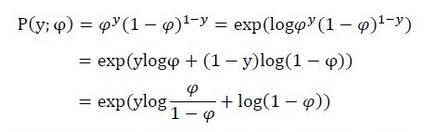
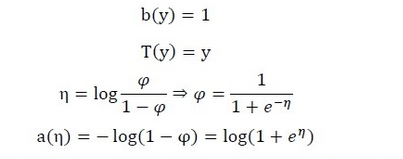
此时,我们就将伯努利分布表示成了指数分布族的形式;其中:
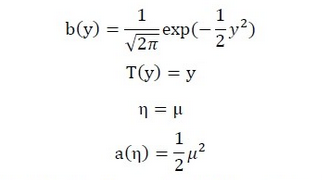
2.将高斯分布写成指数分布族的形式
由高斯分布可以推导出线性模型,由线性模型的假设函数可知,高斯分布的方差
σ²
与假设函数无关,所以简便起见,我们可以将σ²的值设为1,推导过程如下:

此时,我们就将高斯分布表示成了指数分布族的形式;其中:
实际上,大多数概率分布都可以表示成指数分布族的形式。比如:
(1)伯努利分布:对0、1问题进行建模;
(2)多项式分布:多有K个离散结果的事件的建模;
(3)泊松分布:对计数过程进行建模,比如网站访问量的计数问题,放射性衰变的数目,商店 顾客数量等问题;
(4)伽马分布与指数分布:对有间隔的正数进行建模,比如公交车的到站时间问题;
(5)β分布:对小数建模;
(6)Dirichlet分布:对概率分布建模;
(7)Wishart分布:协方差矩阵的分布;
(8)高斯分布;

















 1663
1663

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









