







Makerbase ESP32 FOC 例程13 无线蓝牙控制
第一部分 硬件介绍
1.1 硬件清单
| 序号 | 品名 | 数量 |
|---|---|---|
| 1 | ESP32 FOC V2.0 主板 | 1 |
| 2 | 2808航模电机 | 2 |
| 3 | 12V电源适配器 | 1 |
| 4 | AS5600编码器和配线 | 1 |
注意:MKS 2808是航模无刷电机,带有AS5600编码器,可实现360°连续运转。
主要参数如下:
| 序号 | 名称 | 参数 |
|---|---|---|
| 1 | 输入电压 | 12V |
| 2 | 极对数 | 7 |
| 3 | KV值 | 700KV |
| 4 | 最大转速 | 78400ERPM |
| 5 | 编码器分辨率(I2C)接口 | 12bit |
| 6 | 编码器分辨率(Analog)接口 | 1024 |
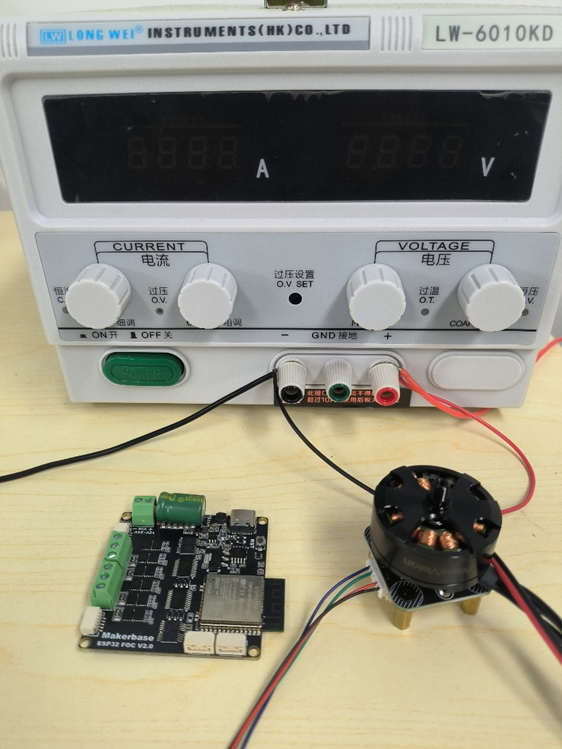
硬件清单如下图所示:
ESP32 FOC V2.0原理图和例程代码等资料请加入企鹅群(732557609)下载

1.2 硬件连接
1.电机的三根相线连接至ESP32 FOC V2.0 主板M0端。
2.连接电机的AS5600编码器至ESP32 FOC V
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1233
1233

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









