







一. 模块介绍
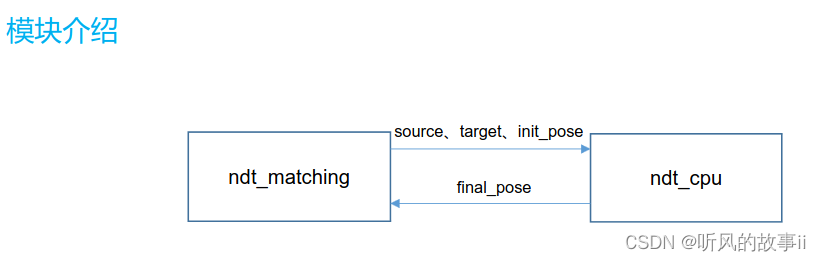
ndt_cpu模块是ndt算法的具体实现过程,通过ndt_matching提供的source(输入scan)、target(map)和init_pose,最终得到一个精确的final_pose.
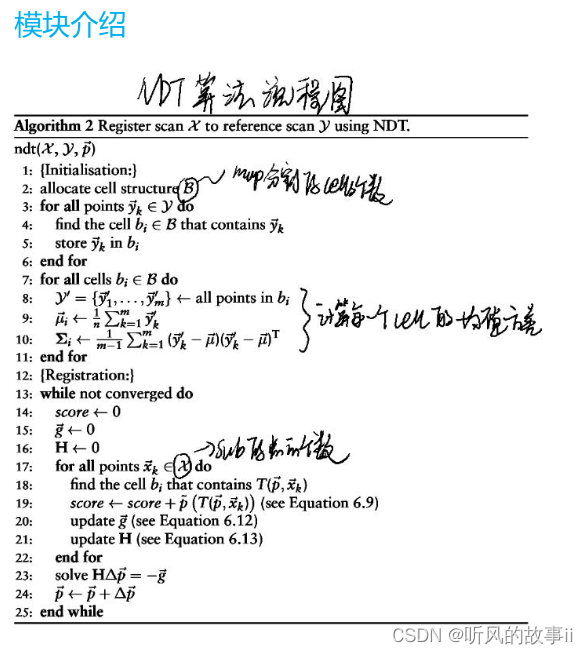
2d和3d通用,需要先熟悉这张框架图,再进行源码解析,同论文中的公式来一一对应
二. 源码解析
关键函数VoxelGrid :
void NormalDistributionsTransform<PointSourceType, PointTargetType>::setInputTarget(typename pcl::PointCloud<PointTargetType>::Ptr input)
{
Registration<PointSourceType, PointTargetType>::setInputTarget(input);
// Build the voxel grid
// 将map分割成为多个cell,resolution_分辨率默认为1,分辨率越大算力越强
if (input->points.size() > 0) {
voxel_grid_.setLeafSize(resolution_, resolution_, resolution_);
voxel_grid_.setInput(input);
}
}
将map分割成为多个cell,resolution_分辨率默认为1,分辨率越大算力越强:
void VoxelGrid<PointSourceType>::setInput(typename pcl::PointCloud<PointSourceType>::Ptr input_cloud)
{
if (input_cloud->points.size() > 0) {
/* If no voxel grid was created, then
* build the initial voxel grid and octree
*/
source_cloud_ = input_cloud;
findBoundaries();
std::vector<Eigen::Vector3i> voxel_ids(input_cloud->points.size());
// 计算每一个输入point在分割后的voxel中的实际id
for (int i = 0; i < input_cloud->points.size(); i++) {
Eigen::Vector3i &vid = voxel_ids[i];
PointSourceType p = input_cloud->points[i];
vid(0) = static_cast<int>(floor(p.x / voxel_x_));
vid(1) = static_cast<int>(floor(p.y / voxel_y_));
vid(2) = static_cast<int>(floor(p.z / voxel_z_));
}
// 插入八叉树中
octree_.setInput(voxel_ids, input_cloud);
voxel_ids.clear();
initialize();
// 如下两个函数用于计算每个voxel的centroid(μ)和 covariance(Σ)
scatterPointsToVoxelGrid();
computeCentroidAndCovariance();
}
}
同ndt_matching模块通过调用此函数正式进行ndt优化的运算:
//同ndt_matching模块通过调用此函数正式进行ndt优化的运算
template <typename PointSourceType, typename PointTargetType>
void Registration<PointSourceType, PointTargetType>::align(const Eigen::Matrix<float, 4, 4> &guess)
{
converged_ = false;
final_transformation_ = transformation_ = previous_transformation_ = Eigen::Matrix<float, 4, 4>::Identity();
trans_cloud_.points.resize(source_cloud_->points.size());
for (int i = 0; i < trans_cloud_.points.size(); i++) {
trans_cloud_.points[i] = source_cloud_->points[i];
}
computeTransformation(guess);
}
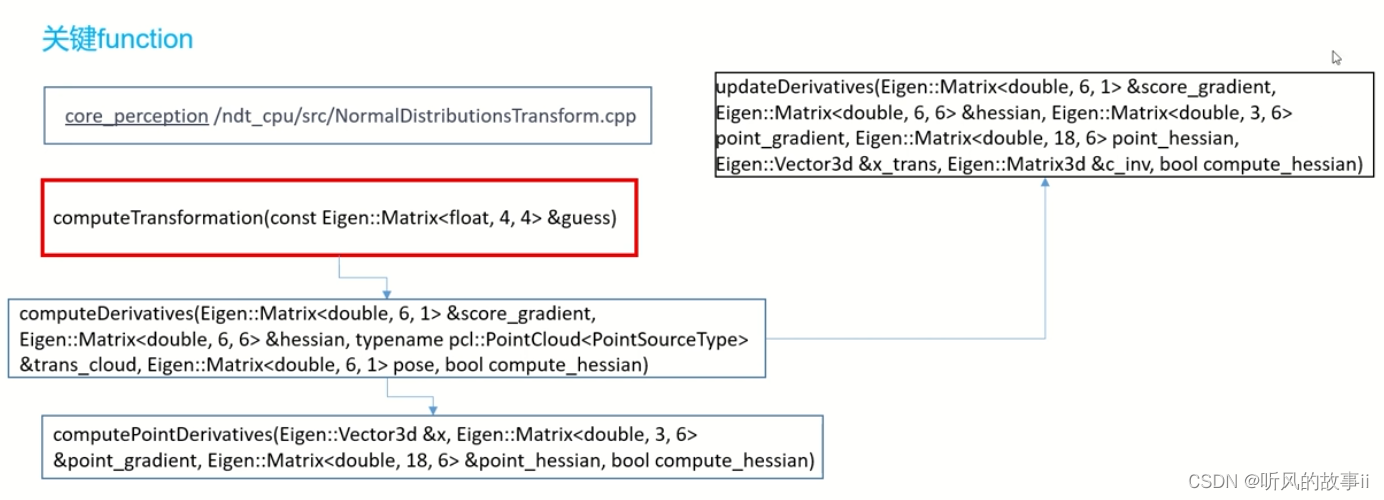
正式通过computeTransformation()函数进行计算:
void NormalDistributionsTransform<PointSourceType, PointTargetType>::computeTransformation(const Eigen::Matrix<float, 4, 4> &guess)
{
nr_iterations_ = 0;
converged_ = false;
double gauss_c1, gauss_c2, gauss_d3;
gauss_c1 = 10 * ( 1 - outlier_ratio_);
gauss_c2 = outlier_ratio_ / pow(resolution_, 3);
// 这里的计算公式参考NDT那篇博士论文中的公式6.8,最终主要是为了求取d1和d2,也就是为之后建立优化函数计算系数
gauss_d3 = - log(gauss_c2);
gauss_d1_ = -log(gauss_c1 + gauss_c2) - gauss_d3;
gauss_d2_ = -2 * log((-log(gauss_c1 * exp(-0.5) + gauss_c2) - gauss_d3) / gauss_d1_);
if (guess != Eigen::Matrix4f::Identity()) {
final_transformation_ = guess;
pcl::transformPointCloud(*source_cloud_, trans_cloud_, guess);
}
Eigen::Transform<float, 3, Eigen::Affine, Eigen::ColMajor> eig_transformation;
eig_transformation.matrix() = final_transformation_;
Eigen::Matrix<double, 6, 1> p, delta_p, score_gradient;
Eigen::Vector3f init_translation = eig_transformation.translation();
Eigen::Vector3f init_rotation = eig_transformation.rotation().eulerAngles(0, 1, 2);
p << init_translation(0), init_translation(1), init_translation(2), init_rotation(0), init_rotation(1), init_rotation(2);
Eigen::Matrix<double, 6, 6> hessian;
double score = 0;
double delta_p_norm;
//由此进入hession矩阵和score_gradient梯度矩阵的计算
score = computeDerivatives(score_gradient, hessian, trans_cloud_, p);
int points_number = source_cloud_->points.size();
//进行迭代运算
while (!converged_) {
previous_transformation_ = transformation_;
// 计算增量 H*delta_p=-g
Eigen::JacobiSVD<Eigen::Matrix<double, 6, 6> > sv(hessian, Eigen::ComputeFullU | Eigen::ComputeFullV);
delta_p = sv.solve(-score_gradient);
delta_p_norm = delta_p.norm();
if (delta_p_norm == 0 || delta_p_norm != delta_p_norm) {
trans_probability_ = score / static_cast<double>(points_number);
converged_ = delta_p_norm == delta_p_norm;
return;
}
// 给每次优化后的步长乘了一个步长系数,并且通过调用computeDerivatives()来更新score_gradient和hessian
delta_p.normalize();
//相当于一个补长搜索策略,涉及一些比较复杂的数学优化知识,感兴趣同学可以深入研究下,参考的论文和书籍已经附在函数里面
delta_p_norm = computeStepLengthMT(p, delta_p, delta_p_norm, step_size_, transformation_epsilon_ / 2, score, score_gradient, hessian, trans_cloud_);
delta_p *= delta_p_norm;
transformation_ = (Eigen::Translation<float, 3>(static_cast<float>(delta_p(0)), static_cast<float>(delta_p(1)), static_cast<float>(delta_p(2))) *
Eigen::AngleAxis<float>(static_cast<float>(delta_p(3)), Eigen::Vector3f::UnitX()) *
Eigen::AngleAxis<float>(static_cast<float>(delta_p(4)), Eigen::Vector3f::UnitY()) *
Eigen::AngleAxis<float>(static_cast<float>(delta_p(5)), Eigen::Vector3f::UnitZ())).matrix();
p = p + delta_p;
//Not update visualizer
// 收敛或达到最大迭代次数,停止迭代运算
if (nr_iterations_ > max_iterations_ || (nr_iterations_ && (std::fabs(delta_p_norm) < transformation_epsilon_))) {
converged_ = true;
}
nr_iterations_++;
}
if (source_cloud_->points.size() > 0) {
trans_probability_ = score / static_cast<double>(source_cloud_->points.size());
}
}
double NormalDistributionsTransform<PointSourceType, PointTargetType>::computeDerivatives(Eigen::Matrix<double, 6, 1> &score_gradient, Eigen::Matrix<double, 6, 6> &hessian,
typename pcl::PointCloud<PointSourceType> &trans_cloud,
Eigen::Matrix<double, 6, 1> pose, bool compute_hessian)
{
PointSourceType x_pt, x_trans_pt;
Eigen::Vector3d x, x_trans;
Eigen::Matrix3d c_inv;
score_gradient.setZero ();
hessian.setZero ();
//Compute Angle Derivatives
// 根据输入6Dpose来计算一阶和二阶雅克比(Hession矩阵)中的关键项
computeAngleDerivatives(pose);
std::vector<int> neighbor_ids;
Eigen::Matrix<double, 3, 6> point_gradient;
Eigen::Matrix<double, 18, 6> point_hessian;
double score = 0;
point_gradient.setZero();
point_gradient.block<3, 3>(0, 0).setIdentity();
point_hessian.setZero();
for (int idx = 0; idx < source_cloud_->points.size(); idx++) {
neighbor_ids.clear();
x_trans_pt = trans_cloud.points[idx];
// 遍历输入cloud中的每一个point,寻找它在指定距离内的邻近voxels的id
voxel_grid_.radiusSearch(x_trans_pt, resolution_, neighbor_ids);
for (int i = 0; i < neighbor_ids.size(); i++) {
int vid = neighbor_ids[i];
x_pt = source_cloud_->points[idx];
x = Eigen::Vector3d(x_pt.x, x_pt.y, x_pt.z);
x_trans = Eigen::Vector3d(x_trans_pt.x, x_trans_pt.y, x_trans_pt.z);
//得到当前遍历voxel的均值和方差
x_trans -= voxel_grid_.getCentroid(vid);
c_inv = voxel_grid_.getInverseCovariance(vid);
//根据当前遍历point,生成一阶和二阶雅克比矩阵
computePointDerivatives(x, point_gradient, point_hessian, compute_hessian);
score += updateDerivatives(score_gradient, hessian, point_gradient, point_hessian, x_trans, c_inv, compute_hessian);
}
}
return score;
}















 9122
9122











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









