







1. 背景
- URDF(Unified Robot Description Format)是ROS中用于描述机器人的标准格式
- SDF(Simulation Description Format)是Gazebo中支持的机器人建模的原生格式。
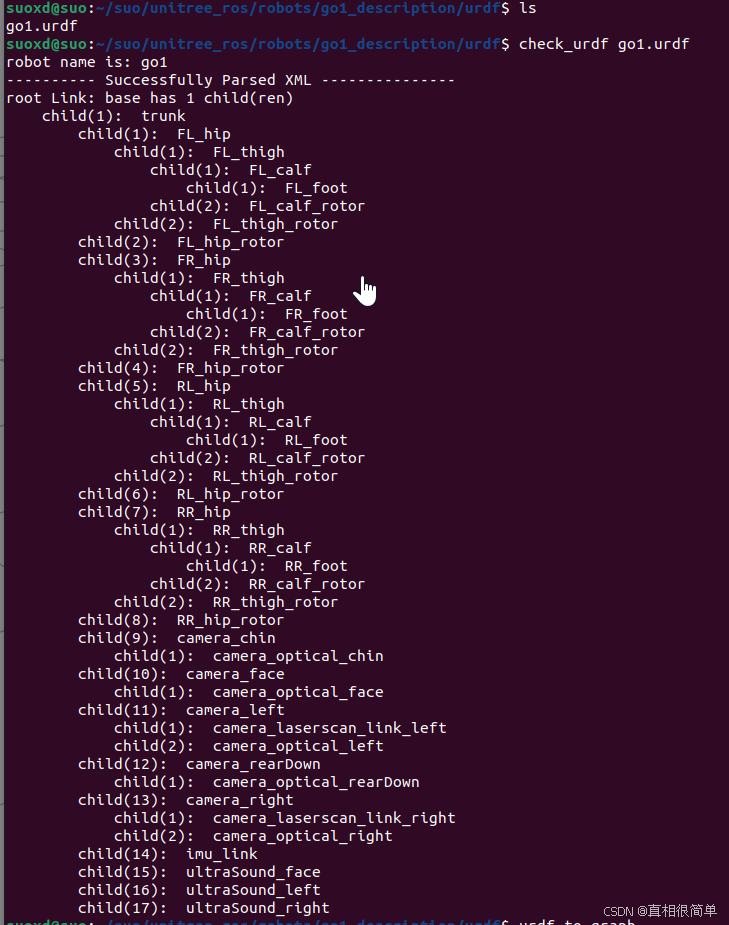
2. 校验URDF文件
check_urdf
3. 转换为SDF(可选)
urdf_to_sdf your_robot.urdf > your_robot.sdf
gz sdf -p your_robot.urdf > your_robot.sdf
4. Gazebo菜单加载(方案一)
gazebo
- 点击左侧面板的“Insert”按钮。
- 在弹出的对话框中,选择“Model”选项卡。
- 点击“Choose File”按钮,并导航到保存URDF或SDF文件的目录。
- 选择文件,然后点击“Open”按钮。
- 在模型名称输入框中,为模型指定一个名称。
- 点击“OK”按钮,Gazebo将加载并显示机器人模型。
5. ROS加载(方案二)
<launch>
<!-- 将URDF文件的内容加载到参数服务器 -->
<param name="robot_description" textfile="$(find your_robot_description_package)/urdf/your_robot.urdf" />
<!-- 启动Gazebo -->
<include file="$(find gazebo_ros)/launch/empty_world.launch" />
<!-- 在Gazebo中显示机器人模型 -->
<node pkg="gazebo_ros" type="spawn_model" name="model" args="-urdf -model my_robot -param robot_description" />
</launch>
使用roslaunch命令启动launch文件:
roslaunch your_launch_file.launch


















 1294
1294

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











