






机器人控制:物理人机交互控制中的不稳定性因素及其解决思路
物理人机交互控制中的不稳定性是指在机器人或相关物理系统与人类进行交互时,系统行为表现出的一种非预期、不可控或难以预测的动态特性。这种不稳定性可能源于多个方面,包括但不限于系统硬件的缺陷、控制算法的局限性、环境的不确定性以及人机交互过程中的人为因素等。
物理人机交互控制中的不稳定性可能表现为:
运动不稳定:机器人在执行动作或响应人类指令时,其运动轨迹、速度或加速度可能出现非预期的波动或变化,导致交互过程不平稳或难以控制。
响应延迟:由于系统处理速度的限制或传感器数据的误差,机器人可能无法及时响应人类的操作或指令,导致交互过程中的时间延迟。
控制精度下降:由于环境噪声、系统误差或交互过程中的干扰,机器人的控制精度可能下降,无法准确执行预期的任务或动作。
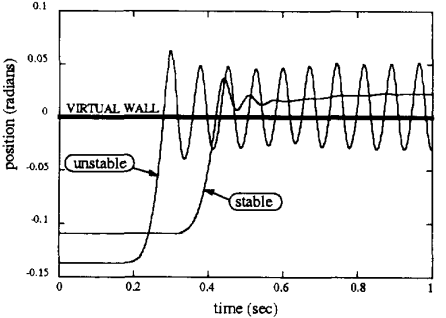
接触力波动:由于弹性环境的变形和恢复特性,机器人在与其接触时可能会遭受到不断变化的接触力。这种接触力的波动可能导致机器人的运动轨迹不稳定,难以精确控制。
位置偏差:机器人试图与弹性环境建立稳定接触时,由于环境的弹性,机器人的实际位置可能与其预期位置之间存在偏差。这种位置偏差可能随着接触力的变化而不断变化,使得机器人难以准确执行预定任务。

为了证明机器人与弹簧阻尼墙壁碰撞是不稳定的,可以模拟这样的系统并观察其行为。假设机器人以一定的初速度向墙壁移动,墙壁具有弹簧和阻尼特性。使用MATLAB脚本来模拟这个过程。
% 参数设置
m = 1; % 机器人的质量
k_robot = 10; % 机器人的阻抗控制刚度系数
c_robot = 2; % 机器人的阻抗控制阻尼系数
k_wall = 1; % 墙壁的弹簧刚度系数
c_wall = 0.5; % 墙壁的阻尼系数
x_target = 1; % 机器人的目标位置
v0 = 0.5; % 机器人的初始速度
dt = 0.01; % 时间步长
t_end = 10; % 模拟的总时间
% 初始化变量
t = 0:dt:t_end; % 时间向量
x = zeros(size(t)); % 机器人的位置
v = v0 * ones(size(t)); % 机器人的速度
f_robot = zeros(size(t)); % 机器人受到的力(阻抗控制产生的力)
f_wall = zeros(size(t)); % 墙壁对机器人施加的力(弹簧阻尼力)
is_contact = false(size(t)); % 记录机器人是否与墙壁接触
% 设置初始位置和速度
x(1) = 0; % 假设机器人从原点开始
v(1) = v0; % 初始速度
% 模拟碰撞过程
for i = 2:length(t)
% 使用前一步的位置和速度来计算当前步的力和加速度
e = x_target - x(i-1); % 位置误差
f_robot(i-1) = -k_robot * e - c_robot * v(i-1); % 阻抗控制力
% 检查机器人是否与墙壁接触
if x(i-1) <= 0
is_contact(i-1) = true; % 记录接触状态
f_wall(i-1) = -k_wall * x(i-1) - c_wall * v(i-1); % 墙壁对机器人的力
else
is_contact(i-1) = false; % 记录未接触状态
f_wall(i-1) = 0; % 墙壁对机器人的力(当机器人未与墙壁接触时)
end
% 计算加速度,更新速度和位置
a = (f_robot(i-1) + f_wall(i-1)) / m; % 加速度
v(i) = v(i-1) + a * dt; % 更新速度
x(i) = x(i-1) + v(i-1) * dt; % 更新位置,注意这里使用v(i-1)
end
% 绘制结果
figure;
subplot(3,1,1);
plot(t, x);
xlabel('Time (s)');
ylabel('Position (m)');
title('Robot Position vs. Time');
grid on;
subplot(3,1,2);
plot(t, v);
xlabel('Time (s)');
ylabel('Velocity (m/s)');
title('Robot Velocity vs. Time');
grid on;
subplot(3,1,3);
plot(t, f_robot, 'b', t, f_wall, 'r--');
legend('Robot Force', 'Wall Force');
xlabel('Time (s)');
ylabel('Force (N)');
title('Forces Acting on the Robot');
grid on;
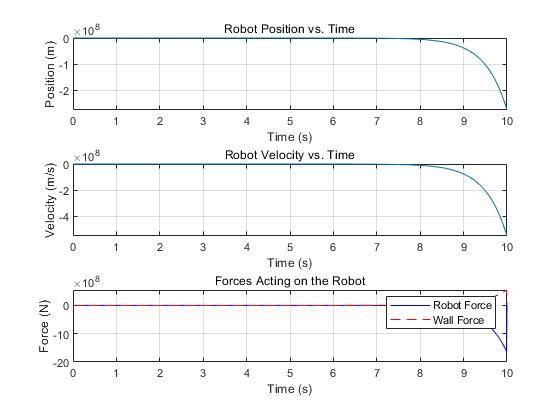
这个程序模拟了一个基本的物理系统,其中机器人受到目标位置的阻抗控制力和墙壁的弹簧阻尼力。以下是程序运行结果体现出的物理现象:















 375
375











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









