






一. 简介
起重机是用于垂直升降或者垂直升降并水平移动重物的机电设备,例如,塔式起重机(塔机),门式起重机(龙门吊),行式起重机(行车、行吊)等。
起重机通常使用带电磁抱闸制动器的电机,或者使用电机+液压抱闸制动器。对于起重机而言,最重要的性能通常包含以下三点:
(1)运行过程平稳,负载运动过程中无摇摆。
(2)启停过程平稳,拥有较好的抱闸时序,保证启停时刻没有溜车和拉抱闸。
(3)加减速时间短,可以从停止快速加速到目标挡位(速度),从目标速度快速停机抱闸。
二. 经典抱闸时序
经典的起重机抱闸时序如下图1所示,该时序虽然是最原始最简单的时序,但是,却是最经典的时序,其他各类时序可由其发展和优化而来。弄懂了这个经典时序,其他时序以此类推,大道三千,殊途同归。
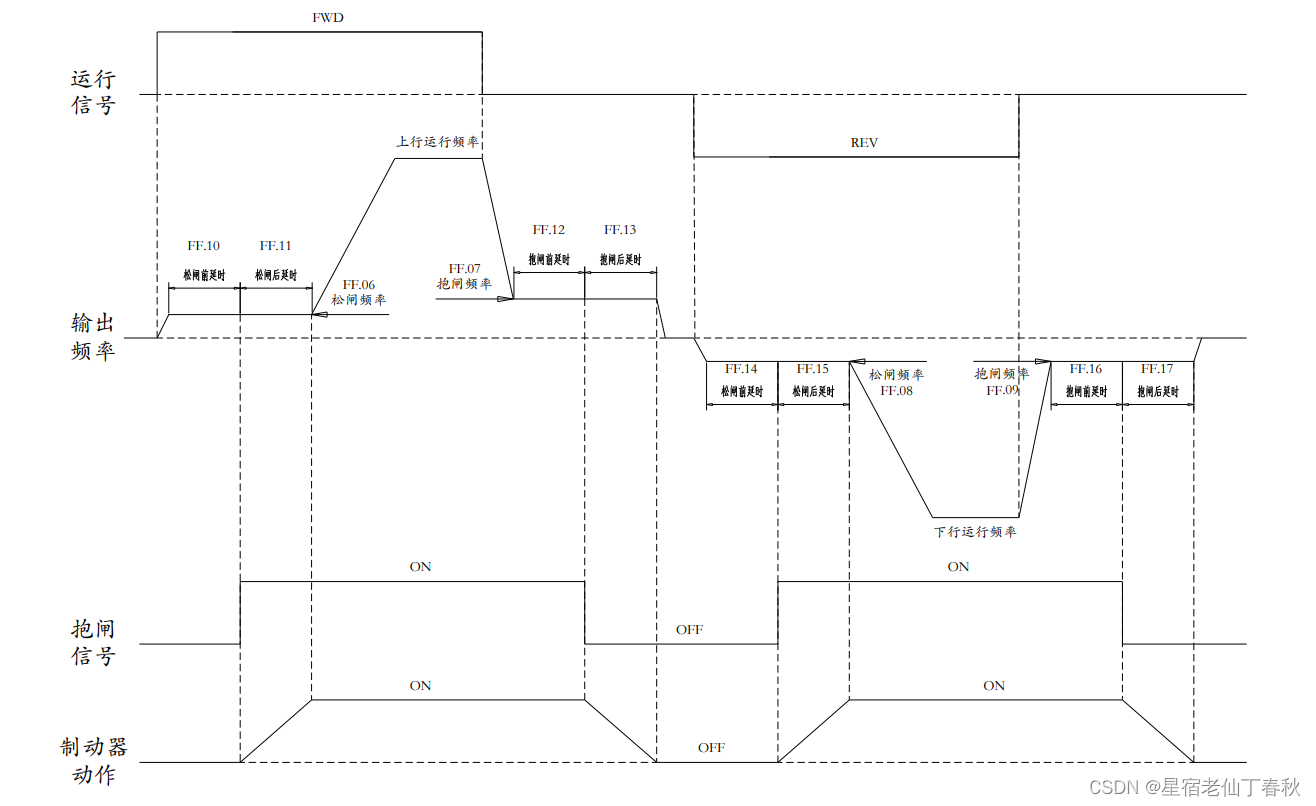
图1. 起重机抱闸时序图
三. 抱闸时序分析
抱闸动作过程中,各个阶段及其参数都有各自具体的目的和作用,下面来分析一下各个动作阶段所起的作用:
(1)为什么要有松闸频率
希望在松闸时,让电机提供力矩,不至于在电机启动还没来得及产生足够力矩时就松闸。
(2)为什么要松闸前延迟
配合松闸频率,使得松闸指令下发时,电机能提供足够的力矩,使得电机能够平稳启动。
(3)为什么要松闸后延迟
抱闸接触器动作需要时间,预留时间给抱闸接触器完成吸合动作,制动器松开抱闸,再松开抱闸时,电机已经逐步承担了负载重力,减小抱闸对平衡负载的出力,使得抱闸出力平衡负载到电机出力平衡负载交接过程能平稳过渡。
(4)为什么要有抱闸频率
希望在抱闸动作时,电机还继续提供力矩,不至于在停机完成,电机无力矩时才抱闸。
(5)为什么要抱闸前延迟
配合抱闸频率,使得抱闸指令下发时,电机以抱闸频率所对应的速度稳定旋转,并且,当抱闸指令下发时,电机仍然继续提供足够的力矩。
(6)为什么要松闸后延迟
预留时间给抱闸接触器完成释放动作,制动器抱闸,保证在接触器动作完成时,电机还在提供相对稳定的力矩,不至于过早开始减小力矩到0,当抱闸抱住后,再逐渐撤掉电机出力,使得抱闸逐渐出力去平衡负载,平稳停止。
四. 抱闸动作过程物理分析
4.1 受力分析
假设停机时,制动器处于抱闸状态,负载悬空在空中,此时,电机不出力,负载重力与制动器抱闸时产生的静摩擦力平衡,保持负载处于静止状态。
假设需要提升负载,当变频器启动但抱闸还没松开时,电机逐渐产生向上的拉力,负载重力保持不变,由于负载始终处于静止状态,所以,负载的向下重力始终与向上的拉力相等,电机向上的拉力+制动器向上的静摩擦力 = 负载重力。在启动后松闸前,电机拉力逐渐增大,制动器静摩擦力逐渐减小,二者之和保持不变等于负载重力。
理想状态是在制动器松闸的瞬间,电机的拉力刚好等于负载的重力,此时,制动器所出的摩擦力为0,此时,抱闸松开,负载的重力从开始的完全由制动器抱闸摩擦力来平衡无缝切换到完全由电机拉力来平衡。
实际情况通常不会是理想状态,但是,想要平稳启动,需要使得制动器实际松闸瞬间,电机所提供的拉力与负载重力接近,让制动器抱闸所提供的摩擦力尽量小一些。如果负载重力与电机拉力差距较小,在松闸后,通过速度环PI调节器和电流环PI调节器的快速调节,能够快速的让电机所提供的拉力补齐与负载重力的差额,从而使电机拉力与负载重力平衡,实现平稳启动。如果二者之间差距很大,会导致启动时过渡不平稳,例如:向下快速溜钩或者快速向上过冲。
停机抱闸过程分析与此类似,不再重复分析。
4.2 电机机械特性分析
以三相异步电机为例,电机在启动后且实际松闸前,一直处于堵转状态,转差率 ,此时产生的力矩为启动转矩;已启动的电机,在达到抱闸频率,渡过抱闸前延迟,抱闸指令已经下发且制动器已经实际抱闸后,如果抱闸后延迟时间还未达到,则电机将处于堵转状态,转差率
,直到时时的给定运行频率到达0Hz,此时,电机的出力力矩为堵转转矩(与启动转矩相同,只是由于产生的条件不同,而使用了不同的名称)。如下图2所示,启动转矩为
,启动转矩需要大于启动时的负载转矩,否则电机将无法启动,被一直堵转。
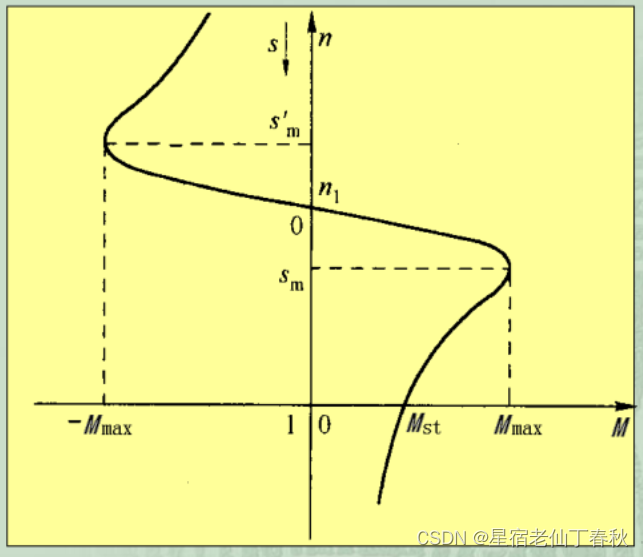
图2. 异步电机机械特性
如果起重机的变频器使用的是VF模式,在保持松闸频率不变时,若制动器还没有实际松闸(如果不考虑定子电压降,假设电机定子磁通 维持恒定不变),在该固定频率堵转下,如果到达稳态,电机的启动转矩将维持恒定。随着松闸频率的改变,启动转矩的大小将发生改变,如下图3所示。
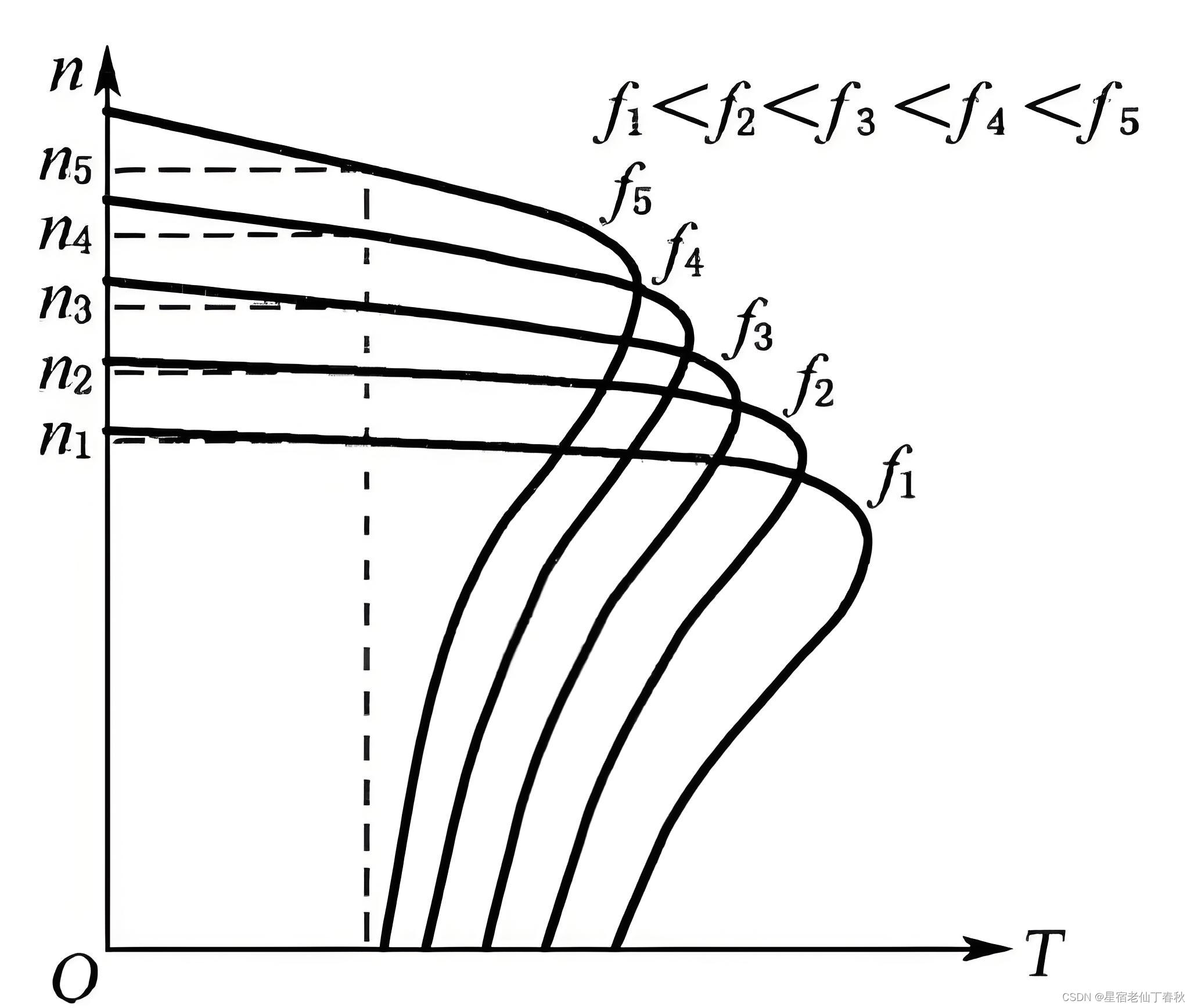
图3. 三相异步电机VF模式变频调速机械特性
如果起重机的变频器使用的是矢量模式,则,在起重机启动时,实际松闸时的输出转矩(启动转矩)由速度环PI调节器调节输出,调节器最终的输出转矩大小由松闸时序参数设置以及速度环和电流环调节器等控制参数配置决定。

















 5015
5015

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









