







 本文详细介绍了YOLOv2目标检测算法的理论知识,包括其原理、网络结构、锚框优化和多尺度预测。同时展示了如何在MATLAB中使用预训练模型进行训练,并提供了关键代码片段。
本文详细介绍了YOLOv2目标检测算法的理论知识,包括其原理、网络结构、锚框优化和多尺度预测。同时展示了如何在MATLAB中使用预训练模型进行训练,并提供了关键代码片段。
目录
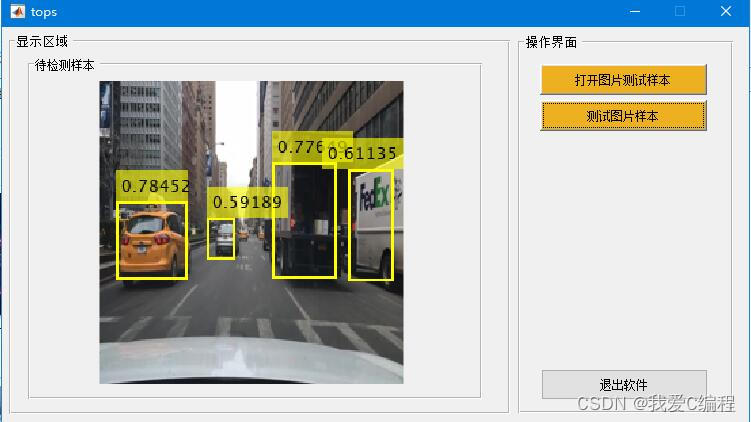
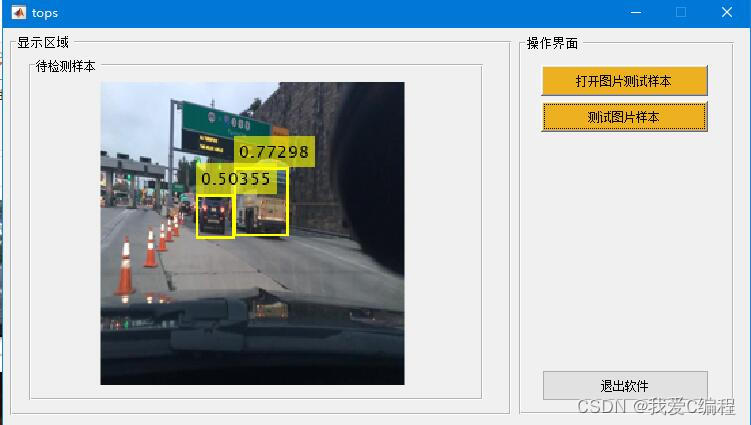
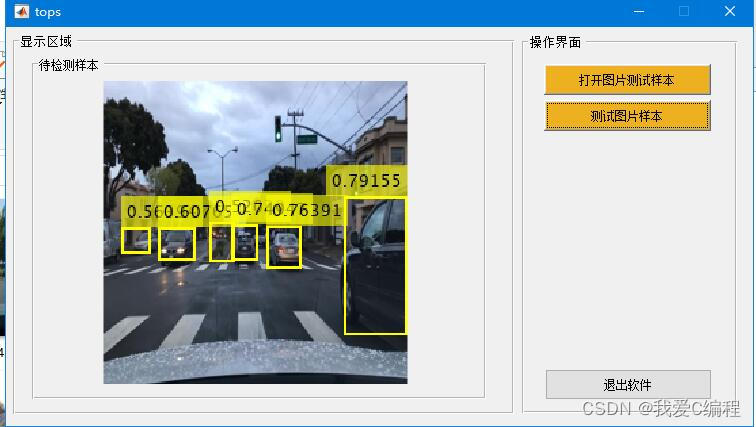
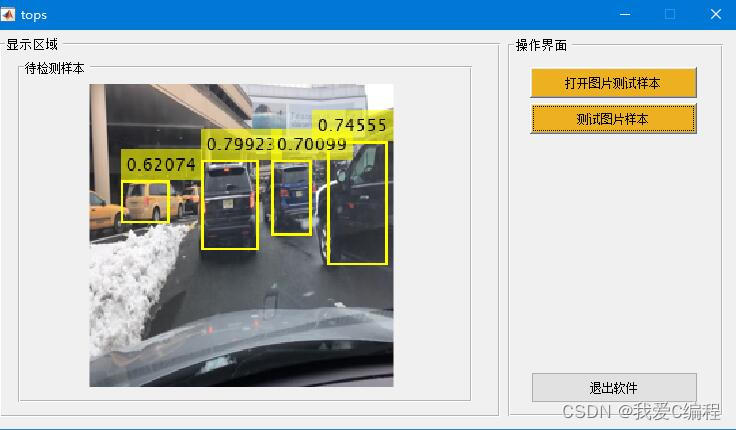
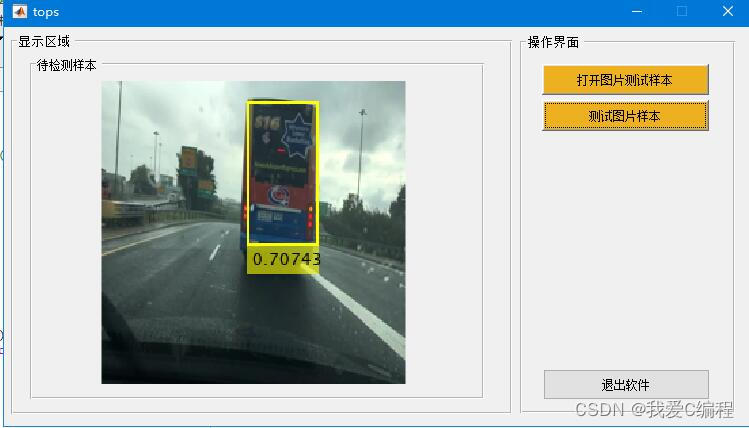
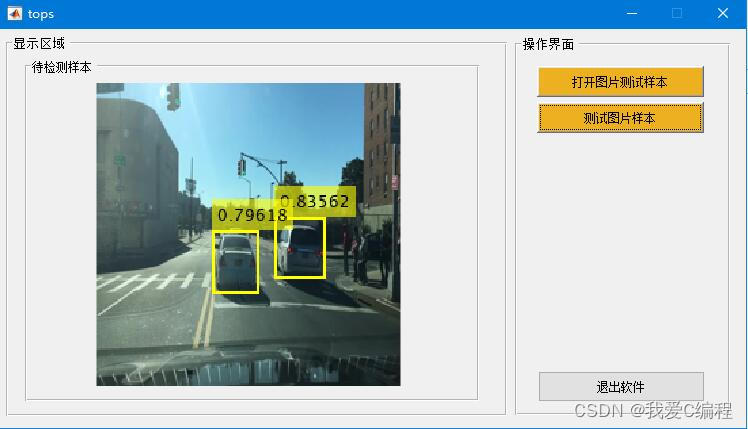
1.算法仿真效果
matlab2022a仿真结果如下:


2.算法涉及理论知识概要
YOLOv2是一种基于深度学习的实时目标检测算法,由Joseph Redmon等人在论文《YOLO9000: Better, Faster, Stronger》中提出。其主要特点是将图像识别任务视为一个回归问题,网络一次前向传播就能预测出图像中所有目标的位置和类别。
网络结构: YOLOv2采用Darknet-19作为特征提取网络,这是一种卷积神经网络(CNN),能有效抽取图像的深层特征。
网格划分与Anchor Boxes: 将输入图像划分为SxS个网格,每个网格负责预测B个边界框(anchor boxes)。对于每个网格单元,网络输出T个类别概率(C类物体+C类背景)、B个边界框的坐标(x, y, w, h)以及每个框的置信度(confidence score),表示框内存在物体且预测框准确的程度。公式表示为:
Confidence Score = IOU(pred_box, true_box) * Objectness Probability
其中IOU代表交并比,Objectness Probability是网络预测的框内存在物体的概率。
坐标预测与归一化: 边界框坐标预测使用相对坐标,公式如下:
x, y:预测框中心相对于网格单元的偏移量,范围[0, 1]。
w, h:预测框宽高相对于整幅图像宽高的比例,经过sigmoid激活后同样范围在[0, 1]。
损失函数: YOLOv2采用了一种复合损失函数,包括位置误差、分类误差以及置信度误差:
Localization Loss: 对于每个网格单元,只有当它包含ground truth box的中心时,才对其负责预测的边界框计算定位误差,通常采用L1或L2损失。
Confidence Loss: 包含物体的网格单元,其置信度损失是预测的置信度与真实IOU的交叉熵损失;不包含物体的网格单元,其置信度损失仅考虑背景类别的交叉熵损失。
Classification Loss: 对于每个预测框,使用softmax函数处理类别概率,并计算多分类交叉熵损失。
Batch Normalization: 在YOLOv2中广泛使用批量归一化层,加速训练过程,提高模型性能。
Anchor Boxes优化: YOLOv2采用了K-means聚类方法优化预设锚框尺寸,使得锚框更好地匹配数据集中的物体形状。
多尺度预测: YOLOv2通过在不同尺度的特征图上进行预测,提高了对不同尺寸目标的检测能力。
3.MATLAB核心程序
........................................................................
sidx = randperm(size(FACES,1));% 打乱数据集索引
idx = floor(0.75 * length(sidx));% 将75%的数据用作训练集
train_data = FACES(sidx(1:idx),:);% 选取训练集
test_data = FACES(sidx(idx+1:end),:);% 选取测试集
% 图像大小
image_size = [224 224 3];
num_classes = size(FACES,2)-1;% 目标类别数量
anchor_boxes = [% 预定义的锚框大小
43 59
18 22
23 29
84 109
];
% 加载预训练的 ResNet-50 模型
load mat\Resnet50.mat
% 用于目标检测的特征层
featureLayer = 'activation_40_relu';
% 构建 YOLOv2 网络
lgraph = yolov2Layers(image_size,num_classes,anchor_boxes,Initial_nn,featureLayer);
options = trainingOptions('sgdm', ...
'MiniBatchSize', 8, ....
'InitialLearnRate',1e-4, ...
'MaxEpochs',200,...
'CheckpointPath', Folder, ...
'Shuffle','every-epoch', ...
'ExecutionEnvironment', 'gpu');% 设置训练选项
% 训练 YOLOv2 目标检测器
[detector,info] = trainYOLOv2ObjectDetector(train_data,lgraph,options);
save model.mat detector
0Y_023m
4.完整算法代码文件获得
V
















 3194
3194











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











