







在《通用机械臂的动力学最小参数集》中,介绍456轴轴线交于一点的机械臂动力学,这里介绍关于协作机械臂的动力学最小参数集形式。说起来关于最小集形式动力学,也花了不少时间,估计一个多月有余,还是那个问题,网上搜索出来的关于协作机械臂的动力学最小集形式更是少的可怜,比前面456轴轴线交于一点的机械臂更少,几乎没有人愿意做,还是说大家做了,有些是不愿分享或者说都是把本体参数测量出来,我不得而知,这里把协作机械臂的动力学最小参数集形式分享出来,验证了理论是正确的。只不过理论上的东西到实际仿真出来的得到的结果这步就已经把很多人给难倒了。
(一)、修改DH模型:
这里先采用UR类型的构型,
在这基础上,在各个关节建立坐标系得到如下:
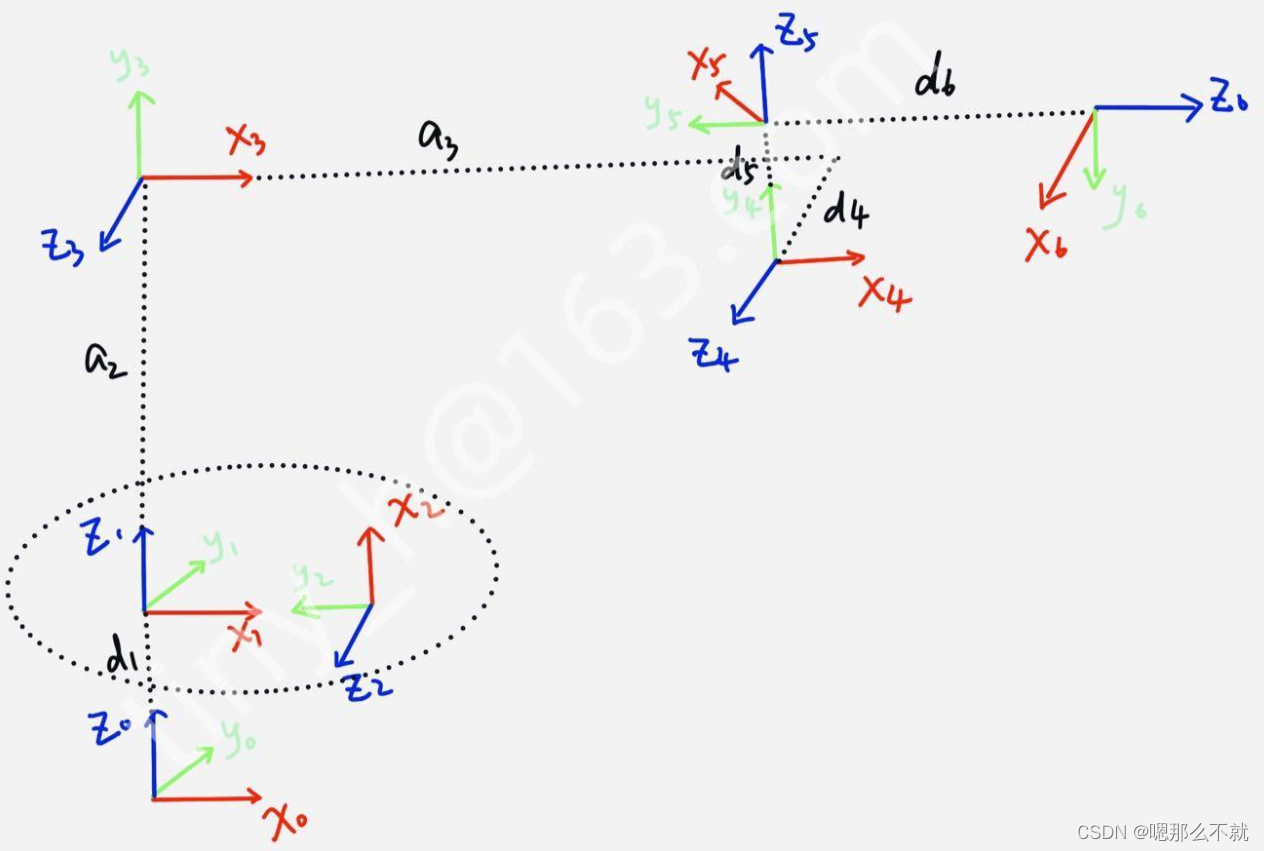
根据上图建立如下dh表格
| 0 | 0 | 0 | ||
| 90 | 0 | 90 | 0 | |
| 0 | 0 | 0 | ||
| 0 | 0 | |||
| -90 | 0 | 90 | ||
| 90 | 0 | 180 |
建立Matlab的Simulink程序如下:
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 3083
3083

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









