







(1)安装QT与配置编译器gcc
下载qt-linux-opensource-5.6.0-x86offline.run;
Terminator运行:
chmod +x qt-linux-opensource-5.6.0-x86-offline.run
./qt-linux-opensource-5.6.0-x86-offline.run
(2)QTCreator调试ros package
a) 新建catkin工作空间:
mkdir -p ~/catkin_ws/src
cd ~/catkin_ws/src
catkin_init_workspace
cd ~/catkin_ws/
catkin_make (配置环境空间)
从github上下载 ros_tutorials 包并copy到src文件中
b) 添加ros包:
启动Qtcreator,点击 Open Project 按钮,在弹出的对话框中选择~/catkin_ws/src/ros_tutorials/roscpp_tutorials/ 路径下的 CMakeLists.txt 文件。
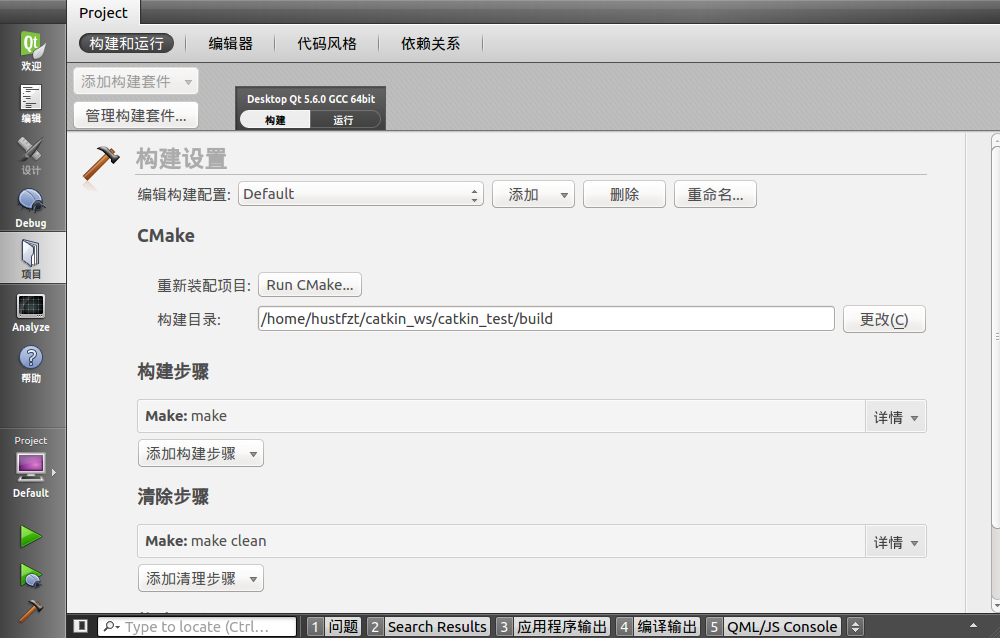
将编译路径修改为 ~/catkin_ws/build/ 的路径。
点击 Next 后,在出现的对话框的 Arguments 一栏填入 -DCMAKE_BUILD_TYPE=Debug ,然后点击 Run CMake 即可开始编译。如果没有错误信息,则点击 Finish 完成,在 Edit 界面可以看到工程文件。
c) 调试:
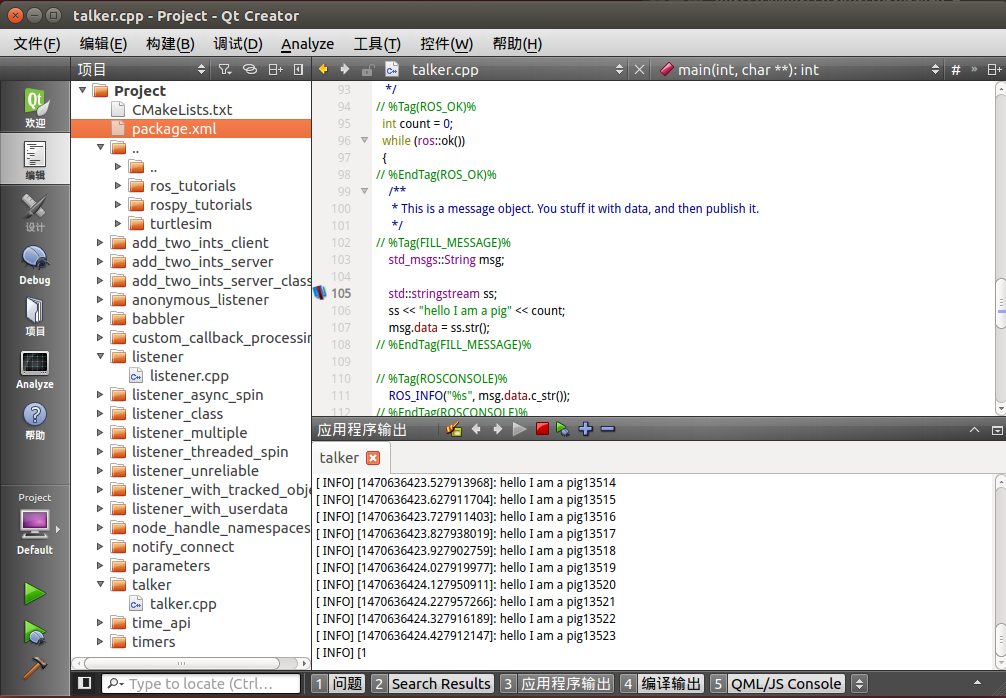
启动ROS Master,打开 talker.cpp 文件。然后找到 “hello world” 所在的位置,修改为 “hello I'm a pig”,然后保存。
从左下角的project default面板中选择 talker,然后运行调试,在弹出的 Application Output 界面能够看到修改后的信息,如下:
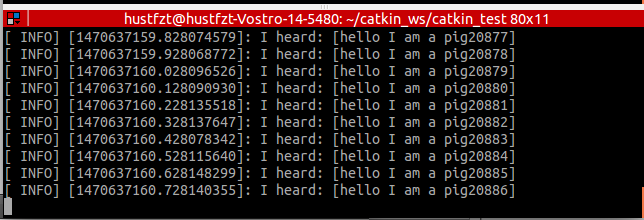
再开一个terminal窗口,输入 rosrun roscpp_tutorials listener 命令,可以看到正确的监听消息:
以通过左边的"Projects"->"Run CMake"重新设置参数:















 506
506

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









