本文探讨了三维欧几里得空间中的刚体运动概念及其表示方法,详细讲解了旋转运动的不同数学表达形式,并总结了刚体运动在不同场景中的应用。
本文探讨了三维欧几里得空间中的刚体运动概念及其表示方法,详细讲解了旋转运动的不同数学表达形式,并总结了刚体运动在不同场景中的应用。
以下内容为本人原创创作,转载请注明。谢谢
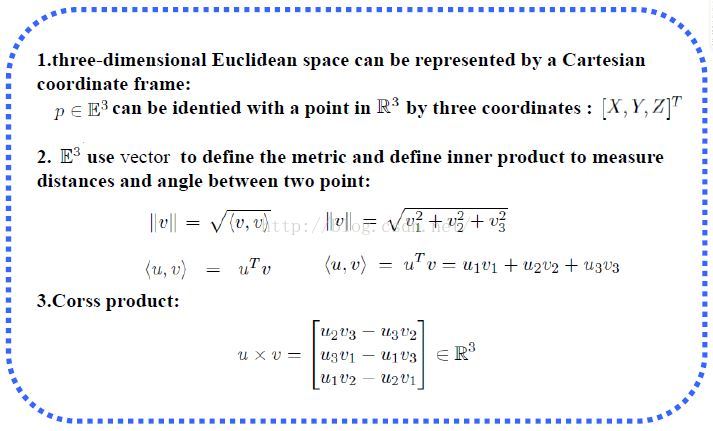
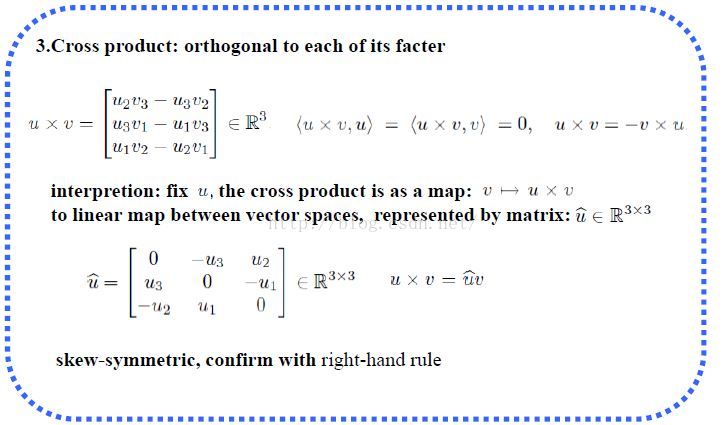
1.Three-dimensional Euclidean space
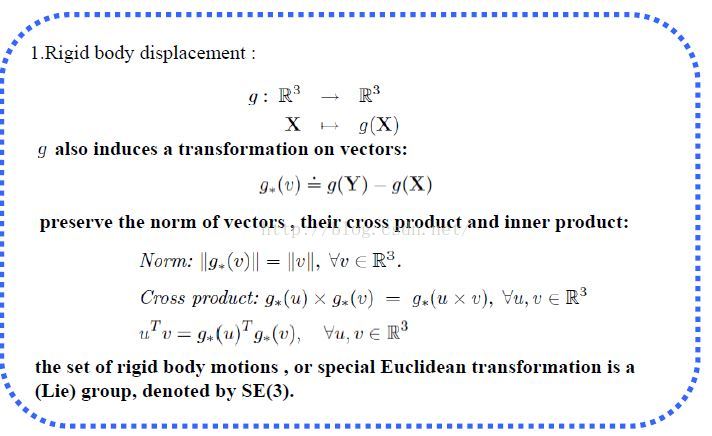
2.Rigid body motion
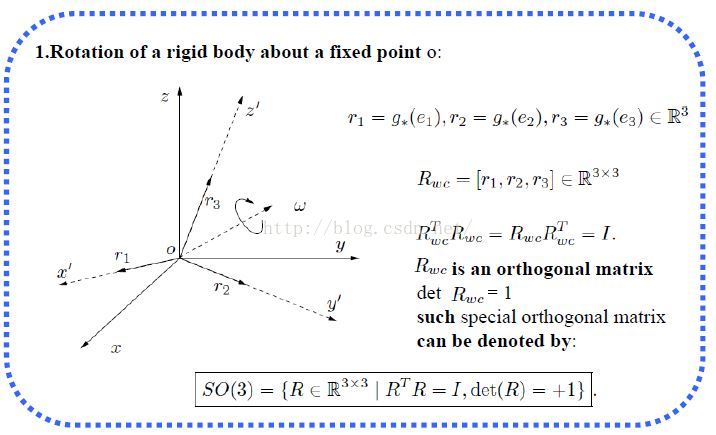
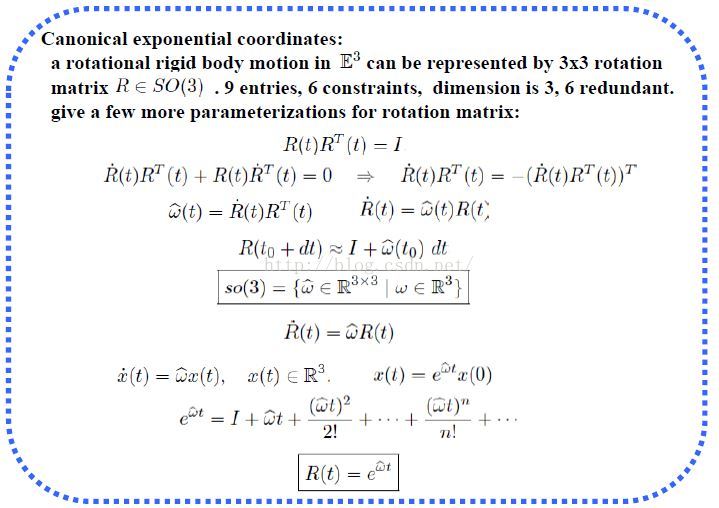
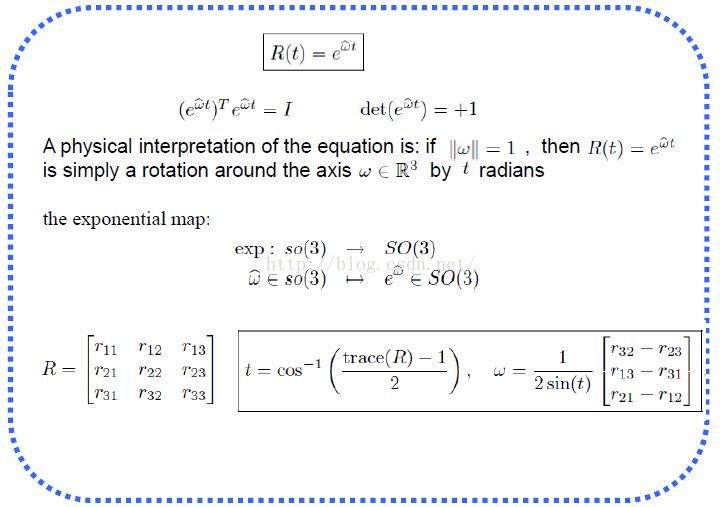
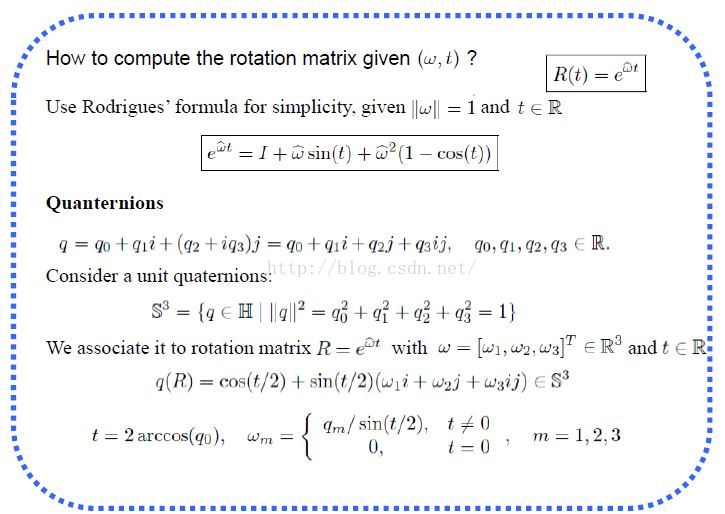
3. Rotation motion and its representations
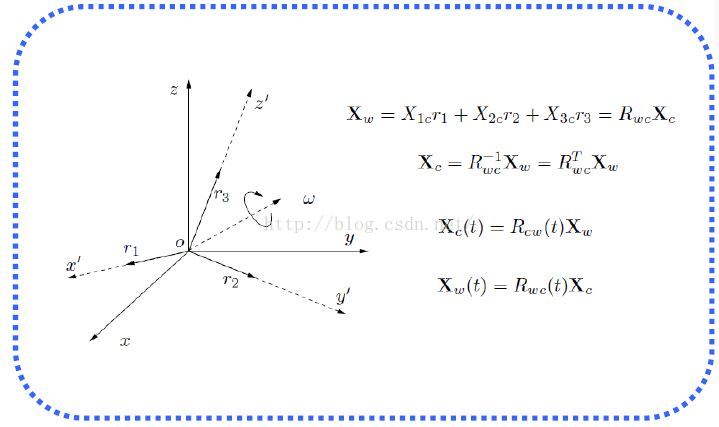
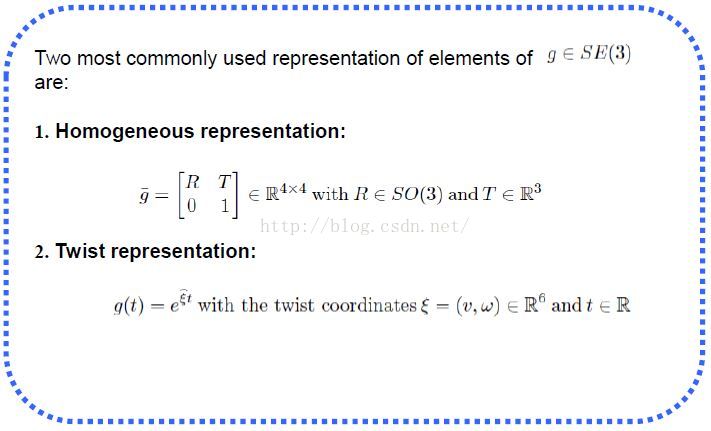
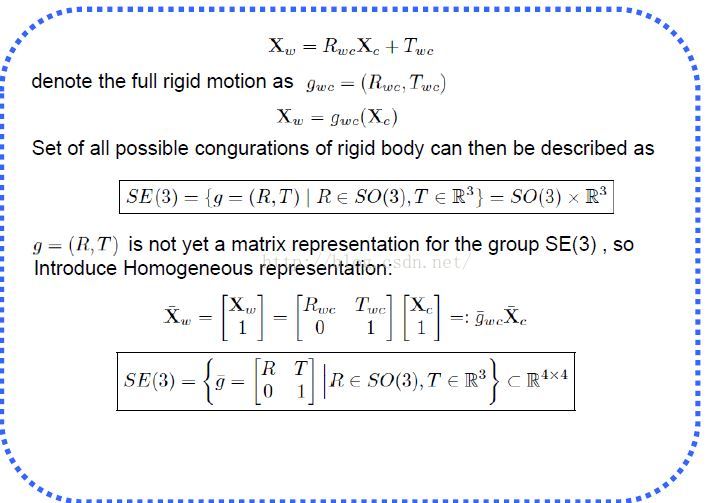
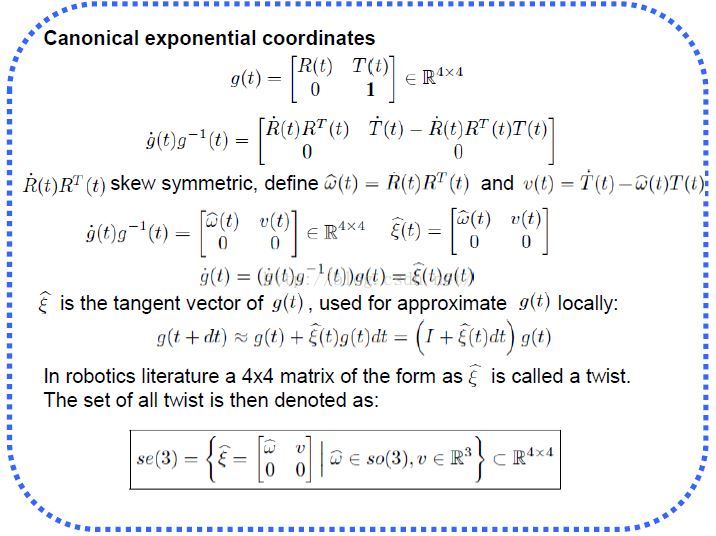
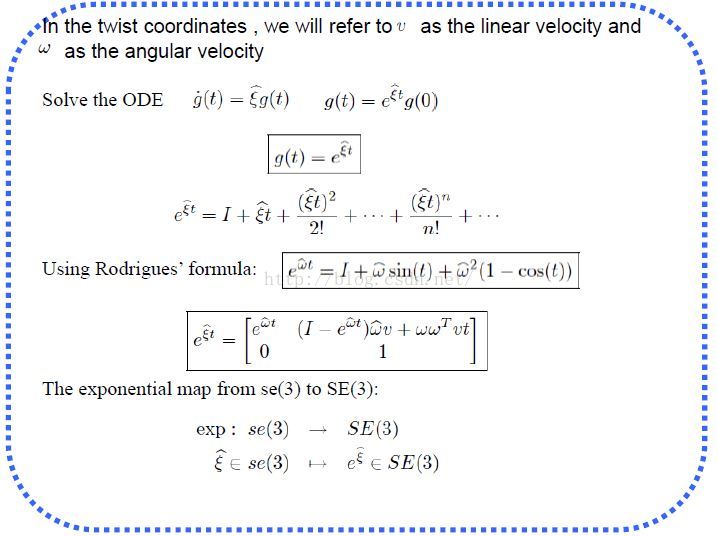
4. Rigid body motion and its representations
5. Summery
以下内容为本人原创创作,转载请注明。谢谢
1.Three-dimensional Euclidean space
2.Rigid body motion
3. Rotation motion and its representations
4. Rigid body motion and its representations
5. Summery
 466
466

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言