






g2o是一种非线性优化方法,用于计算最小二乘问题,因为感觉很重要,决定回过头再总结一下,明天再继续弄pnp部分。
参考了几篇好文章:
g2o入门(一)曲线拟合_111111111112454545的博客-CSDN博客_g2o教程
图优化中点指的是要优化的部分,边指的是误差项。
直接附上源码,和书中源码差距不大:
#include <iostream>
#include <opencv2/core/core.hpp>
#include <g2o/core/block_solver.h>
#include <g2o/core/optimization_algorithm_levenberg.h>
#include <g2o/solvers/dense/linear_solver_dense.h>
#include <eigen3/Eigen/Core>
#include <g2o/core/base_vertex.h>
#include <g2o/core/base_unary_edge.h>
class g2oVertex : public g2o::BaseVertex<3,Eigen::Vector3d>{
public:
EIGEN_MAKE_ALIGNED_OPERATOR_NEW
virtual void setToOriginImpl(){
_estimate << 0,0,0;
}
virtual void oplusImpl( const double* update ){
_estimate += Eigen::Vector3d(update);
}
// 存盘和读盘:留空
virtual bool read( std::istream& in ) {}
virtual bool write( std::ostream& out ) const {}
};
class g2oEdge : public g2o::BaseUnaryEdge<1,double, g2oVertex>{
public:
EIGEN_MAKE_ALIGNED_OPERATOR_NEW
g2oEdge(double x) : BaseUnaryEdge(), _x(x) {}
void computeError()
{
const g2oVertex* v = static_cast<const g2oVertex*> (_vertices[0]);
const Eigen::Vector3d abc = v->estimate();
_error(0,0) = _measurement - std::exp( abc(0,0)*_x*_x + abc(1,0)*_x + abc(2,0) ) ;
}
virtual bool read( std::istream& in ) {}
virtual bool write( std::ostream& out ) const {}
private:
double _x;
};
int main(){
//生成样本
double a = 2.0, b = 3.0, c = 4.0;
int N = 100;
double w = 0.5;
cv::RNG rand;
std::vector<double> XData,YData;
for(int i = 0; i < N; i++){
double x = i/100.0;
XData.push_back(x);
YData.push_back(std::exp(a*x*x + b*x + c)+rand.gaussian(w));
}
//初始化
typedef g2o::BlockSolver< g2o::BlockSolverTraits<3,1> > Block; // 每个误差项优化变量维度为3,误差值维度为1
Block::LinearSolverType* linearSolver = new g2o::LinearSolverDense<Block::PoseMatrixType>();
Block* SolverPtr = new Block(std::unique_ptr<Block::LinearSolverType>(linearSolver));
g2o::OptimizationAlgorithmLevenberg* Solver = new g2o::OptimizationAlgorithmLevenberg(std::unique_ptr<g2o::Solver>(SolverPtr));
g2o::SparseOptimizer Optimazer;
Optimazer.setAlgorithm(Solver);
Optimazer.setVerbose(1);
//增加顶点
g2oVertex* v = new g2oVertex();
v->setEstimate(Eigen::Vector3d(0,0,0));
v->setId(0);
Optimazer.addVertex(v);
//增加单边
for(int i = 0; i < N; i++){
g2oEdge* edge = new g2oEdge(XData[i]);
edge->setId(i);
edge->setVertex(0,v);
edge->setMeasurement(YData[i]);
edge->setInformation(Eigen::Matrix<double,1,1>::Identity()*1/(w*w));
Optimazer.addEdge(edge);
}
//开始优化
Optimazer.initializeOptimization();
Optimazer.optimize(100);
Eigen::Vector3d abc = v->estimate();
std::cout << abc.transpose() << std::endl;
}
有几点需要说明一下
首先是g2o中的各种数据结构,有些复杂,放一张图:
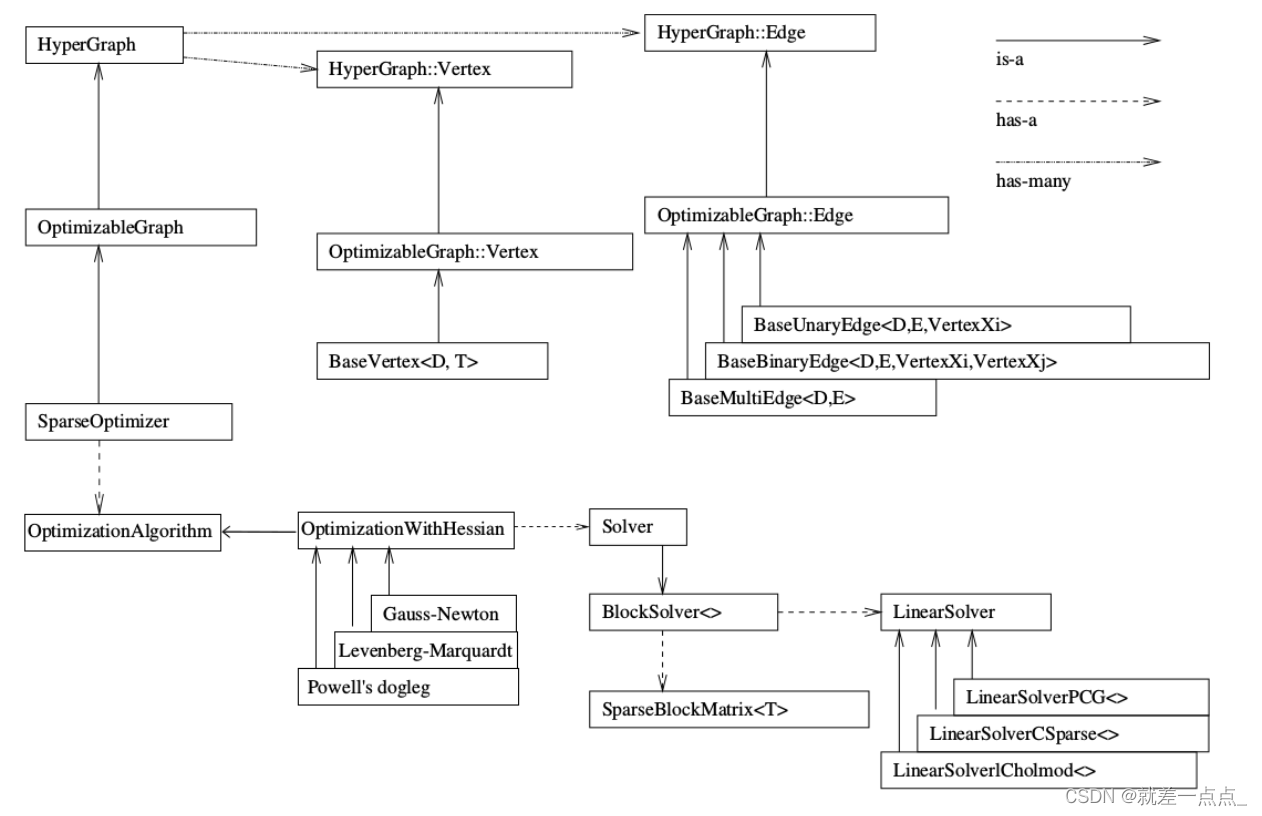
图片来源:深入理解图优化与g2o:g2o篇 - 半闲居士 - 博客园
我在写的过程中遇到的问题是,直接用了Optimazer.addVertex源码中写的OptimazableGraph::Vertex作为点的数据结果(毕竟代码就是这么写的),结果发现这个类中的函数为纯虚函数(末尾有=0),例如:
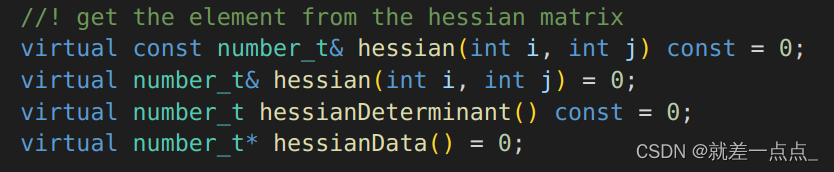
这意味着这个类为抽象类,抽象类是不能被实例化的。这就是为什么必须自己写一个类,再继承BaseVertex或者BaseUnaryEdge的原因。在类中需要重写几个函数,但我不知道自己写的话如何知道要重写这几个函数,看了很久也没有大佬讲解,不过也能看懂,只能暂时理解到这了。
其中setInformation是设置信息矩阵,其为协方差矩阵的逆。协方差矩阵一般设为同维数的对角阵。
剩下的就是set的过程了,没有太多可说的。















 1236
1236











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









