









 Cylinder3D是一个创新的3D框架,针对驾驶场景的LiDAR点云进行语义分割。通过柱状划分和非对称残差块,提升性能,结合维度分解语义建模,实现64.3%的mIoU准确性。该方法优化了原始数据处理,适用于不同稀疏性的点云数据。
Cylinder3D是一个创新的3D框架,针对驾驶场景的LiDAR点云进行语义分割。通过柱状划分和非对称残差块,提升性能,结合维度分解语义建模,实现64.3%的mIoU准确性。该方法优化了原始数据处理,适用于不同稀疏性的点云数据。
Cylinder3D: An Effective 3D Framework for Driving-scene LiDAR Semantic Segmentation(Cylinder3D:一种有效的三维驱动场景激光雷达语义分割框架)
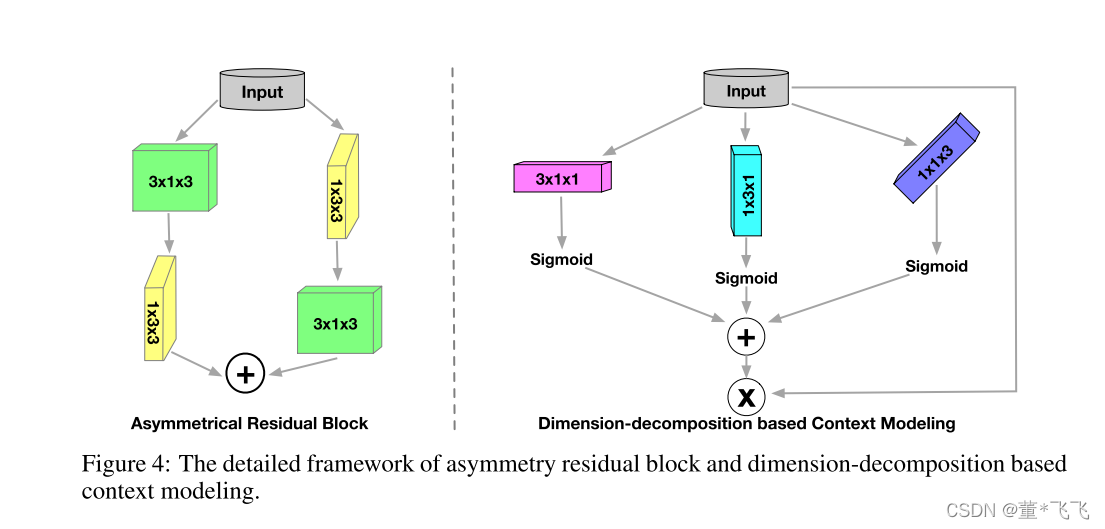
非一致性残差块、维度分解语义建模、柱状卷积骨干网络
一、重点内容提取
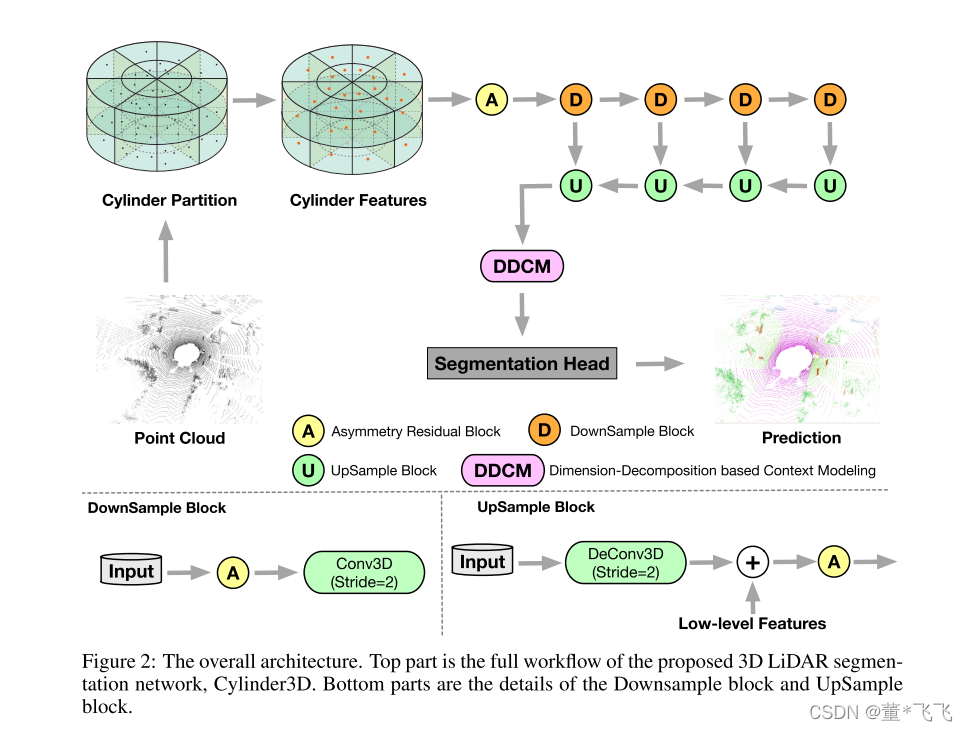
设计了一种柱面划分的三维点云表示,它适用于驱动场景激光雷达点云的不同稀疏性,并提出了一种基于三维卷积的网络。该骨干网络由两个组件组成,包括3D圆柱体分割(用于获取3D表示)和3D U-Net(用于处理3D表示)。通过用非对称残差块替换残差块,可以发现大约1.5%的mIoU性能增益;在添加基于维度分解的语义建模时,提出的Cylinder3D在mIoU方面实现了64.3%的准确性。
二、实验概括
- 网络架构示意图
- 坐标系转化
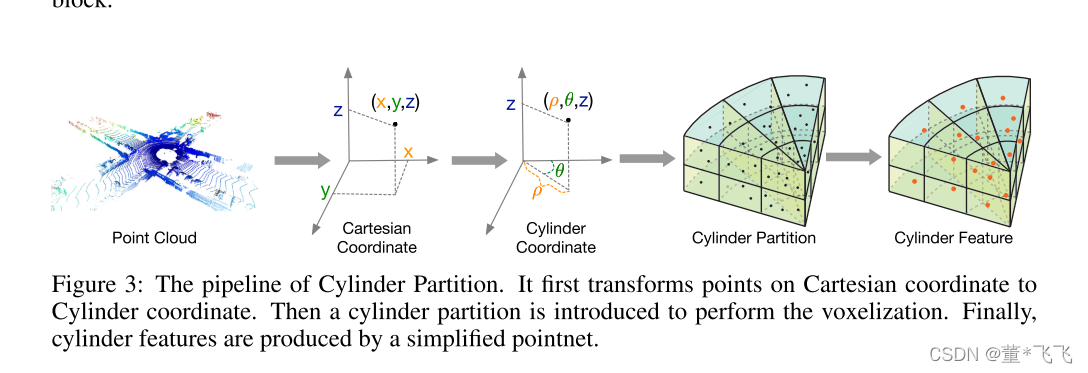
- 柱状划分块
三、进一步优化
- 为该方法找具体合适的应用场景
四、启发
- 充分利于原始数据的信息
- 用与原数据获取高度相似的处理方式对原始数据进行处理



















 5054
5054

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











