







一、线性输出调节问题
1. 问题描述
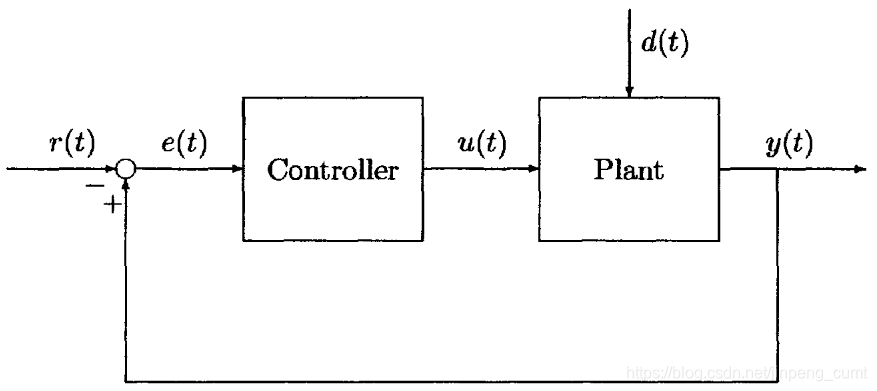
图1 单位反馈控制系统框图
图1的线性系统状态方程如下
(1)
则跟踪误差为
(2)
对于线性系统,参考输入和扰动输入
由线性自治系统产生
(3)
Remark:外系统的类型不一样也会造成解决方法不一样,外系统可分为线性系统和非线性系统,如果考虑时滞,则可分为输入时滞和扰动时滞的输出调节问题。这个为输出调节的研究方向之一。
使
(4)
将参考输入和扰动输入合并,则有
(5)
则系统状态方程和输入误差可写为
(6)
其中
经过上述转换,问题具有扰动的线性系统的跟踪问题或者扰动抑制问题转换为系统的稳定问题。现在所需要的解决的问题是在外部输入的作用下,使得系统(6)的输出量
趋于0。
综上所述,将外系统(5)和系统状态方程(6)进行合并,可得到线性输出调节问题的一般描述
(7)
其中,(7)式称为复合系统,状态量为 。现在的问题就是寻找合适的控制输入
,使得误差
能趋于0。
2. 线性输出调节解决思路
2.1 静态状态反馈控制
(8)
其中,和
为常数矩阵。这里与普通的状态反馈控制器
不一样的是多了一项
,这是因为系统(7)是一个复合系统,状态量包括
。
将控制量(8)式代入系统方程(7)中,可得
(9)
自此,要实现跟踪或者扰动抑制,现在的需要做的工作:通过求解微分方程组(9),寻找到合适的和
,使得系统(9)满足以下性质:
性质1:矩阵满足Hurwitz条件,即
的所有特征值均具有负实部。
性质2:对于所有的和
,系统(9)的轨迹满足
2.2 动态可测输出反馈
(10)
其中,为 ,
为可测量的输出量,为系统输出的部分可测量,
为常数矩阵。
(11)
特殊情况,当时,
,此时为误差输出反馈控制。
将控制量(10)式代入系统方程(7)中,可得
(12)
自此,要实现跟踪或者扰动抑制,现在的需要做的工作:通过求解微分方程组(12),寻找到合适的,使得系统(12)满足以下性质:
性质1:矩阵满足Hurwitz条件,即
的所有特征值均具有负实部。
性质2:对于所有的和
,系统(9)的轨迹满足
综上,对两类反馈控制进行归纳,可得线性输出调节问题 (LORP)的一般描述如下:
(13)
目标:要实现跟踪或者扰动抑制,
手段:通过求解微分方程组(13),寻找到合适的控制增益,使得系统(13)满足以下性质:
性质1:矩阵满足Hurwitz条件,即
的所有特征值均具有负实部。
性质2:对于所有的和
,系统(9)的轨迹满足
3. 求解过程
3.1 必要假设
系统方程(7)必须满足以下假设条件:
假设1:的所有特征值都有非负实部。
假设2:矩阵对是可镇定的。
假设3:矩阵对
是可检测的。
Remark:假设2对应性质1,在此假设下存在状态反馈控制器使得矩阵满足Hurwitz条件;假设3与假设2确保系统有可测的输出反馈控制器。
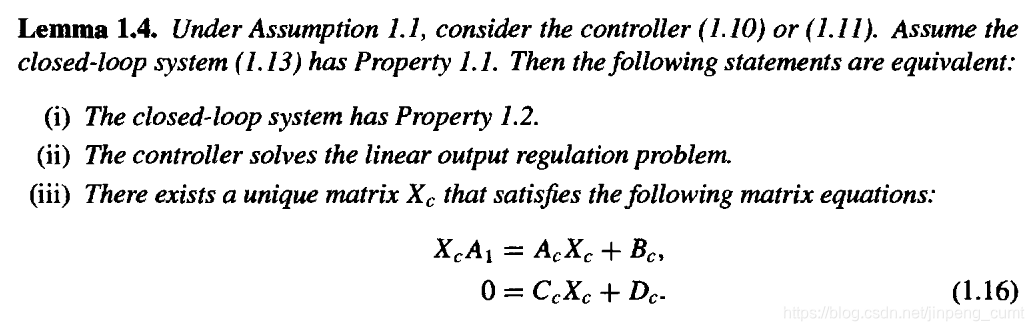
3.2 重要引理
3.3 求解步骤(以状态反馈控制器设计为例)
通常是将其转化为增广系统系统的稳定性问题,状态反馈控制器设计步骤如下:
步骤1: 将输出调节问题转化为增广矩阵的镇定问题,如(15)式所示;
步骤2:根据满足Hurwitz theorem,确定反馈增益系数
;
步骤3: 根据Sylvester 方程,求解反馈增益系数。
因此,输出调节的难点就在于:(1) 内模控制器的构造;(2) 增广系统的镇定问题。
4. 仿真实例
二、线性输出调节问题和线性鲁棒输出调节问题的异同点
分析:线性输出调节和线性鲁棒输出调节所用的控制器不一样,因为线性输出调节问题在参数扰动下不成立。


















 933
933

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











