







基于 FPFH特征匹配和基于L32D特征匹配两个点云。
点云特征匹配算法:基于不同特征建立KDTree,并使用search_knn_vector_xd计算距离,匹配点云。
import numpy as np
import open3d as o3d
if __name__ == "__main__":
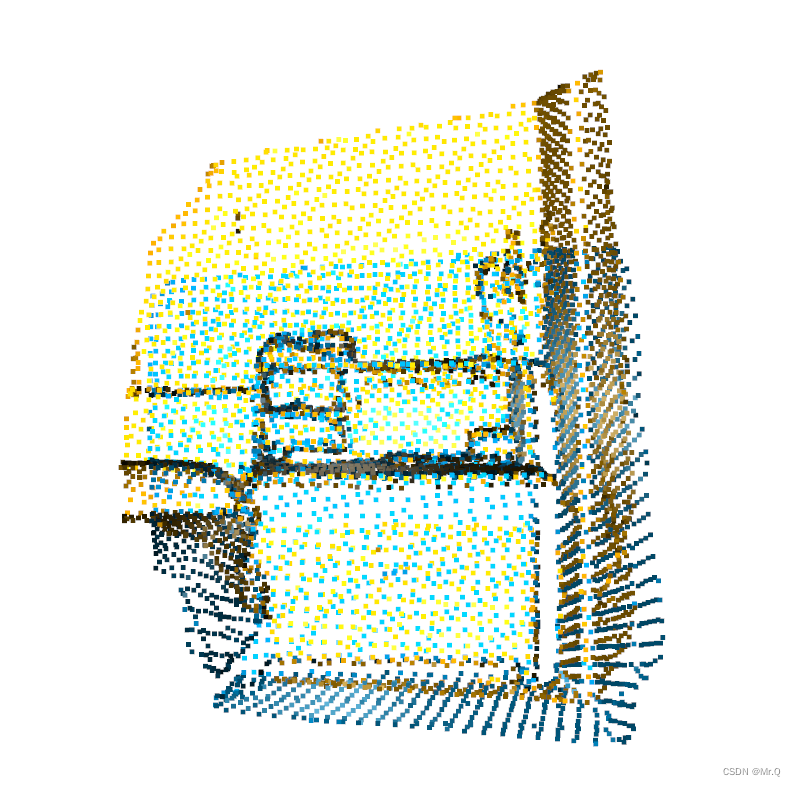
# 1. read *.pcd file
print("Load two aligned point clouds.")
demo_data = o3d.data.DemoFeatureMatchingPointClouds()
pcd0 = o3d.io.read_point_cloud(demo_data.point_cloud_paths[0]) # *.pcd
pcd1 = o3d.io.read_point_cloud(demo_data.point_cloud_paths[1]) # *.pcd
pcd0.paint_uniform_color([1, 0.706, 0])
pcd1.paint_uniform_color([0, 0.651, 0.929])
o3d.visualization.draw_geometries([pcd0, pcd1])
# 2. FPFH feature matching. 读取两个点云各自的特征size(33, num_pt)
print("Load their FPFH feature and evaluate.")
print("Black : matching distance > 0.2")
print("White : matching distance = 0")
feature0 = o3d.io.read_feature(demo_data.fpfh_feature_paths[0]) # return open3d.pipelines.registration.Feature
feature1 = o3d.io.read_feature(demo_data.fpfh_feature_paths[1]) #
# 2.1. 建立f1 KDTree
fpfh_tree = o3d.geometry.KDTreeFlann(feature1) # 基于其中一个点云的特征size(33,num_pt)建立KDTree
# 2.2 f0匹配f1
# p0 match p1, 并在p0可视化距离匹配到的相应点距离。
for i in range(len(pcd0.points)): # 遍历p0所有点,在f1 tree中匹配f0中点
# f0第i个点匹配f1
[_, idx, _] = fpfh_tree.search_knn_vector_xd(query=feature0.data[:, i], knn=1) # f1中查询与f0第i个点邻近的1个点
# 计算p0第i个点,和p1匹配到的idx点距离。
# np.linalg.norm用于求范数, linalg本意为linear(线性) + algebra(代数),norm则表示范数。
dis = np.linalg.norm(x=pcd0.points[i] - pcd1.points[idx[0]]) # 默认二范式:平方和的开根。dis是欧式距离
# np.fmin: 数组元素的元素最小值。Compare two arrays and returns a new array containing the element-wise minima.
# 把dis归一化到0-1之间,其中大于0.2直接置为0,等于0.2置为1, dis等于0的置为1。 以此值定为颜色值
c = (0.2 - np.fmin(dis, 0.2)) / 0.2
pcd0.colors[i] = [c, c, c]
o3d.visualization.draw_geometries([pcd0])
print("")
# 3. L32D feature matching. 读取两个点云各自的特征size(32, num_pt)
print("Load their L32D feature and evaluate.")
print("Black : matching distance > 0.2")
print("White : matching distance = 0")
feature0 = o3d.io.read_feature(demo_data.l32d_feature_paths[0])
feature1 = o3d.io.read_feature(demo_data.l32d_feature_paths[1])
# 3.1 建立f1 KDTree
fpfh_tree = o3d.geometry.KDTreeFlann(feature1)
for i in range(len(pcd0.points)):
[_, idx, _] = fpfh_tree.search_knn_vector_xd(feature0.data[:, i], 1)
dis = np.linalg.norm(pcd0.points[i] - pcd1.points[idx[0]])
c = (0.2 - np.fmin(dis, 0.2)) / 0.2
pcd0.colors[i] = [c, c, c]
o3d.visualization.draw_geometries([pcd0])
print("")
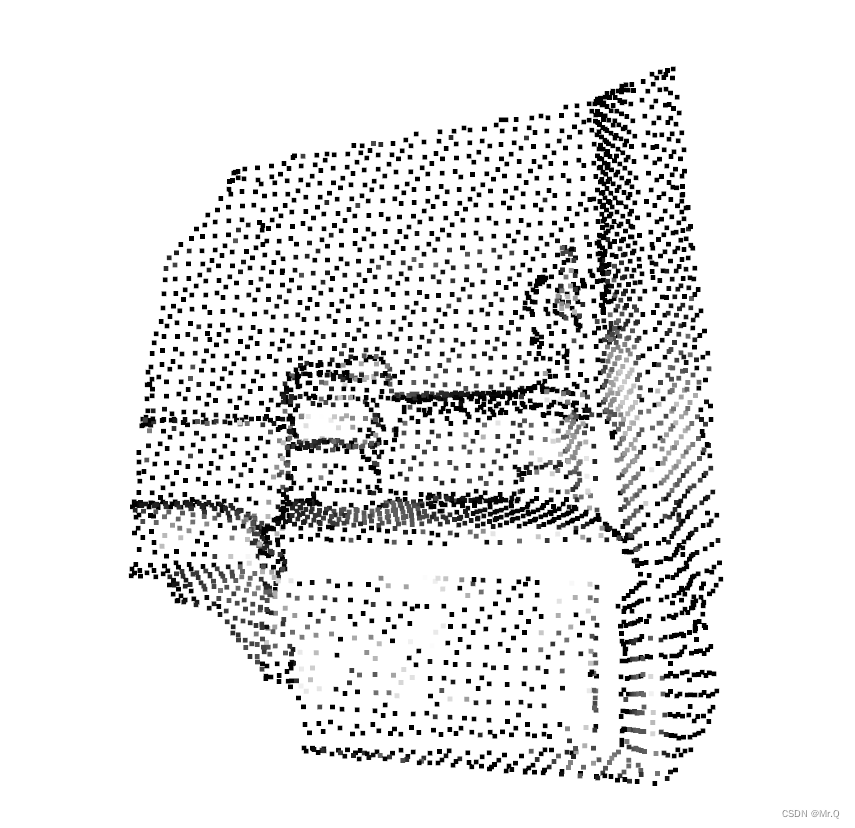
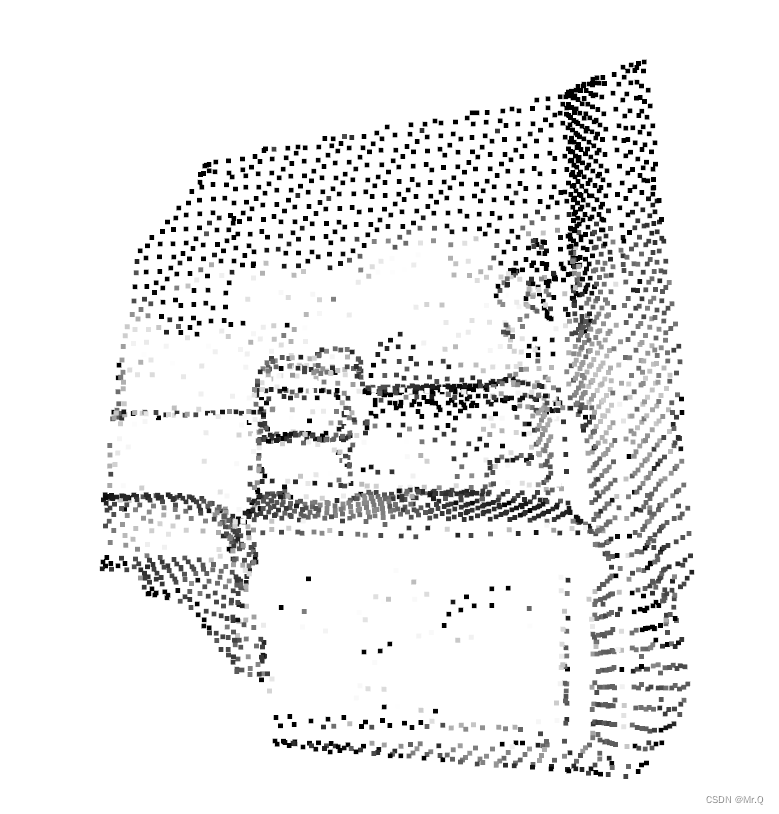
基于FPFH特征 基于L32D特征

















 180
180











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











