






一、gmapping
作用:创建基于二维的栅格化地图
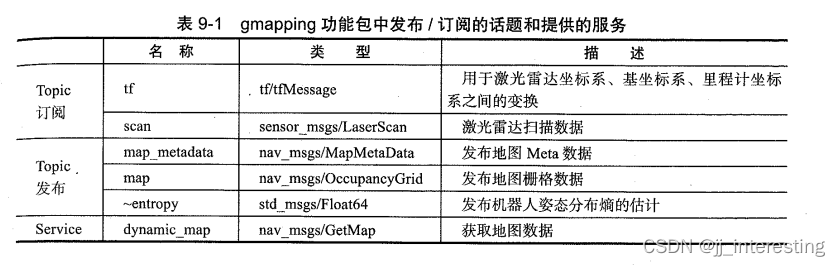
1.话题和服务
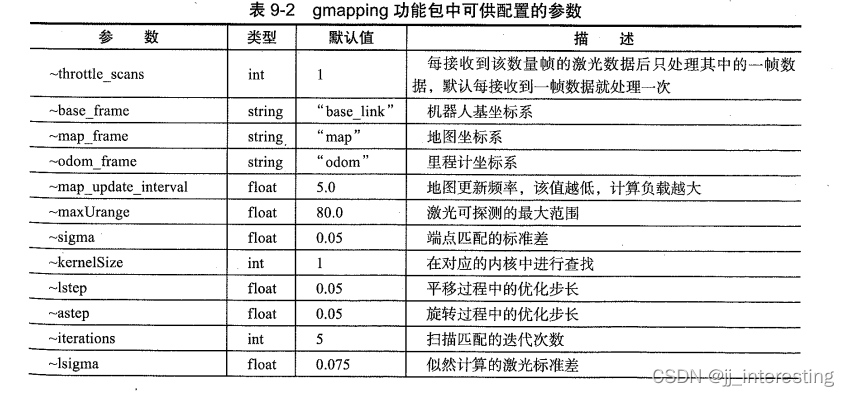
2.参数
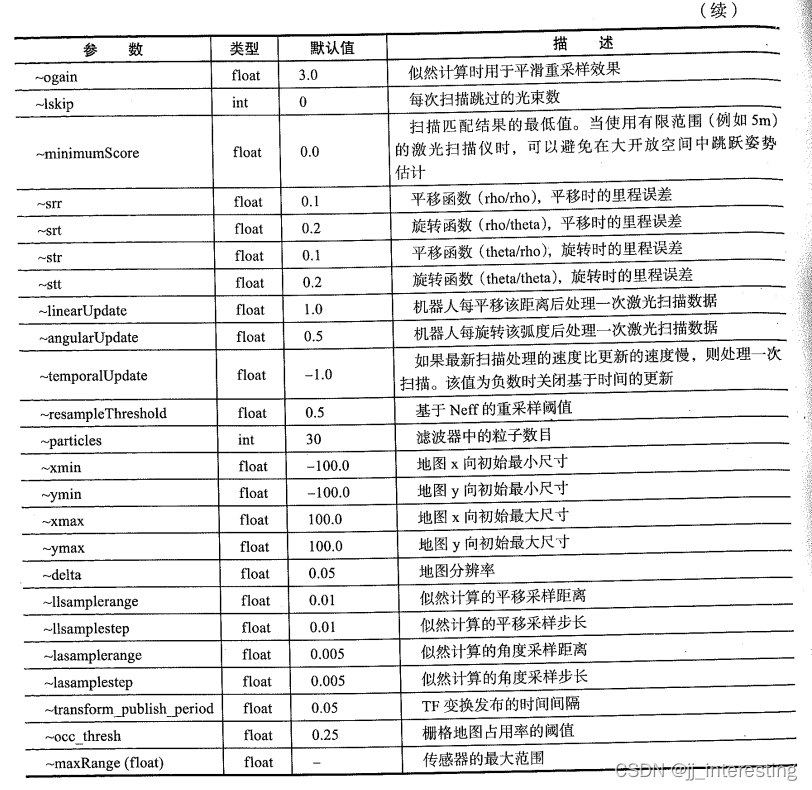
似然计算:相当于概率的逆反,通过函数结构来推测函数的参数。
在编写gmapping.launch时终点关注odom_fram和/scan对应机器人的参数是否一致,/scan话题名如果不一致,使用重映射remap (<remap from="scan" to="$(arg scan_topic)"/>)
二、hector-slam
与gmapping相同的是,也会发布map话题,提供构建完成的地图信息;不同的是,还会发布slam_out_pose和poseupdate两个话题
1话题和服务
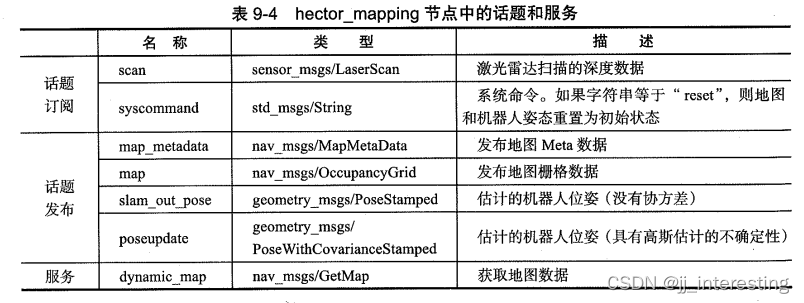
hector-slam和gmapping最大的不同在于不需要订阅里程计/odom消息,而是直接使用激光估算里程计信息,因此当机器人速度过快时会出现打滑的现象,导致建图会出现偏差。
三、......















 385
385











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









