







说明:可以作为对智能驾驶爱好者对摄像头参数理解或者从业工程人员对设计硬件选型参考
前言
在当前智能驾驶中,基于摄像头的 ADAS 因其应用、更高的可靠性和对新要求的适应性而被广泛采用。
ADAS 摄像头通常部署在汽车的前部、侧面和后部,提供驾驶和停车辅助。
前置摄像头系统最常安装在汽车的前部,后视镜后面。
后置摄像头安装在靠近车牌的后侧,而侧面摄像头安装在汽车两侧靠近镜子的位置
《了解布置位置可以点击视觉为王-小鹏以及特斯拉的自动驾驶方案》。
本文介绍了汽车摄像头系统的分辨率(以 Mpixel 为单位)和帧速率 (fps) 选择的见解,重点是单
目前置摄像头,当然也可以用于后/侧摄像头选择参考。
ADAS 前置摄像头 (FC) 系统从现实世界中捕获并识别感兴趣的对象(例如行人、汽车和两轮车)。
如 下 图 所 示 , ADAS FC 系 统 由 摄 像 头 模 块 ( 镜 头 和 传 感 器 ) 组 成 , 用 于 将 场 景 捕 获 为 一 系 列 图 像(即视频),然后在嵌入式处理器芯片上进行分析以识别感兴趣的对象。
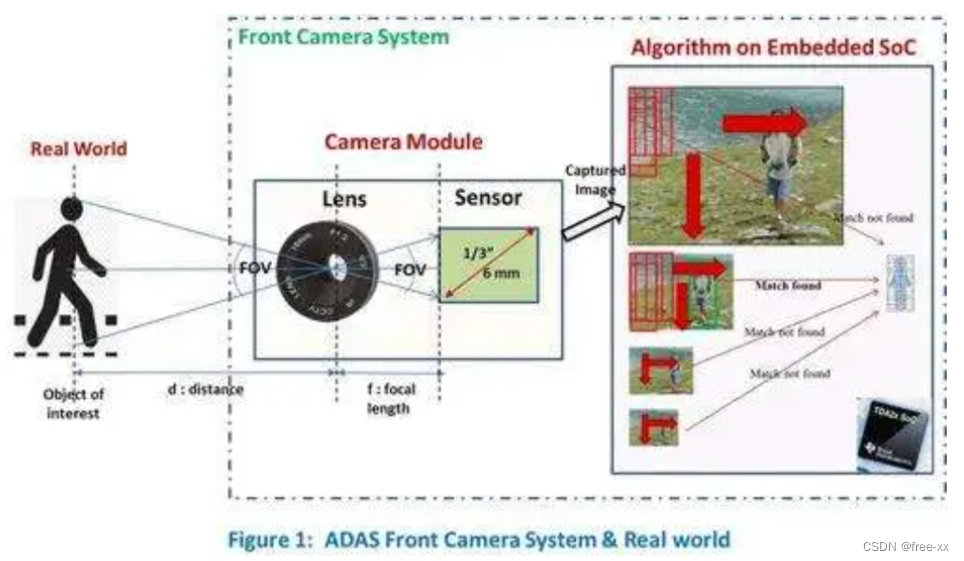
ADAS 前视视像头的关键功能是识别感兴趣的对象以及与汽车的距离,并在正确的时间应用紧急休
息以避免碰撞。
这些目标必须在给定解决方案的高精度检测、低成本、低功耗和小尺寸的严格限制下
实现。
该解决方案必须能够在夜间或弱光驾驶等不同场景下工作。
整体解决方案中的三个参与者相互交互以
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 651
651

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











