






提示:看了那么多使用ardupilot做飞控的,但是我想运行小车怎么办?
ArduPilot Rover SITL
前言
Rover is an easy platform to get started with. Unlike Copter or Plane there are no fast-moving propellers, so there is no need to arm motors. As movement is along the ground, there is no need to consider taking off or landing, and pausing/loitering/waiting is just “stopping”. At the end of initialization the Rover is ready to go!
链接: https://ardupilot.org/dev/docs/rover-sitlmavproxy-tutorial.html
简而言之:Rover不需要螺旋桨,毕竟是地上的汽车,要比Copter or Plane 简单
一、Preconditions首要条件
首要条件就是你系统上设置了SITL,并且已经使用——map和——console选项启动了SITL:
cd ~/ardupilot/Rover
sim_vehicle.py --map --console
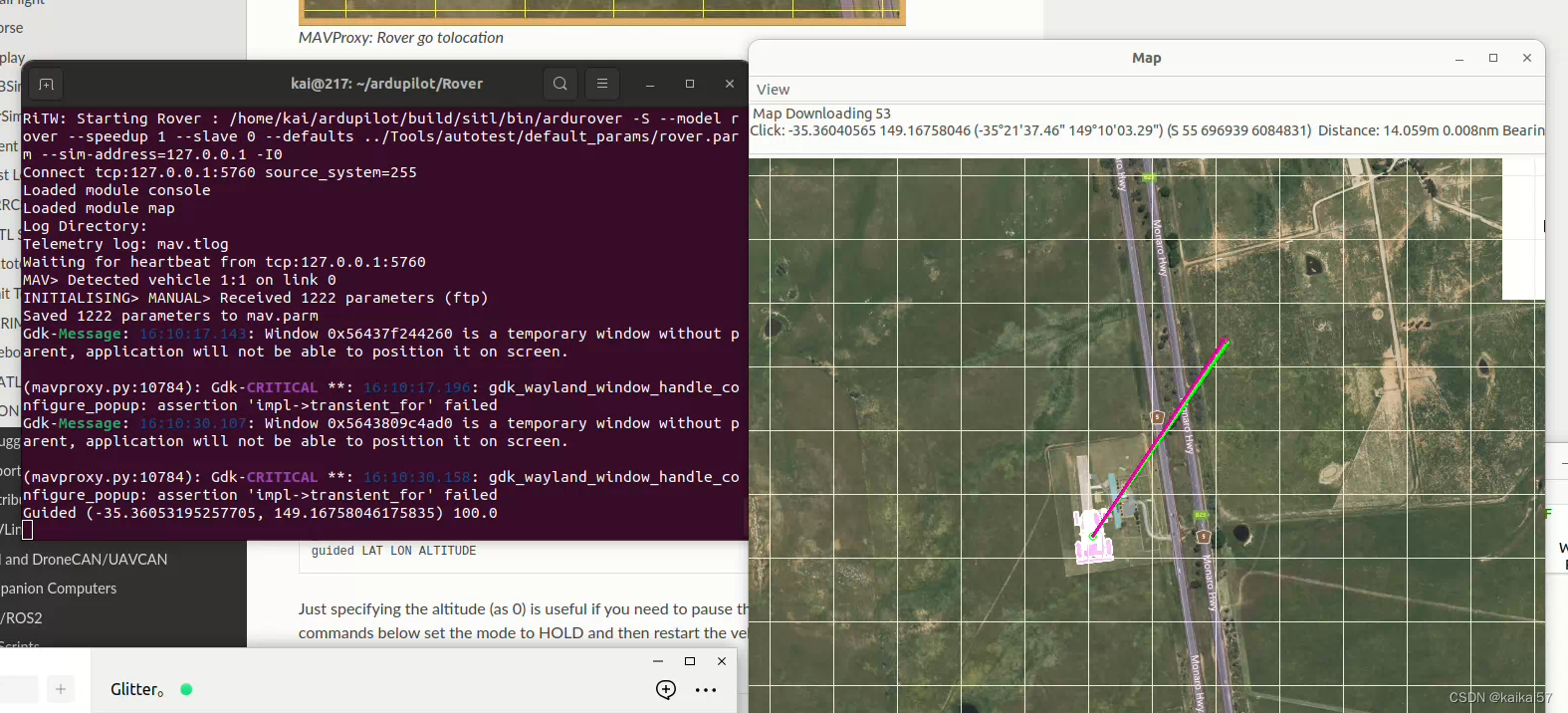
然后就出现了这个小车。
右键单击目标目的地的地图,选择Fly to,并输入高度(将忽略该高度)。漫游车应该行驶到该位置,然后暂停(仍处于引导模式)。目前我小车没有动,我也不明白,之后有理解了在回来。
二、Guiding the vehicle
上一节几乎涵盖了你需要知道的关于在导航模式下在地图上移动车辆的所有内容。
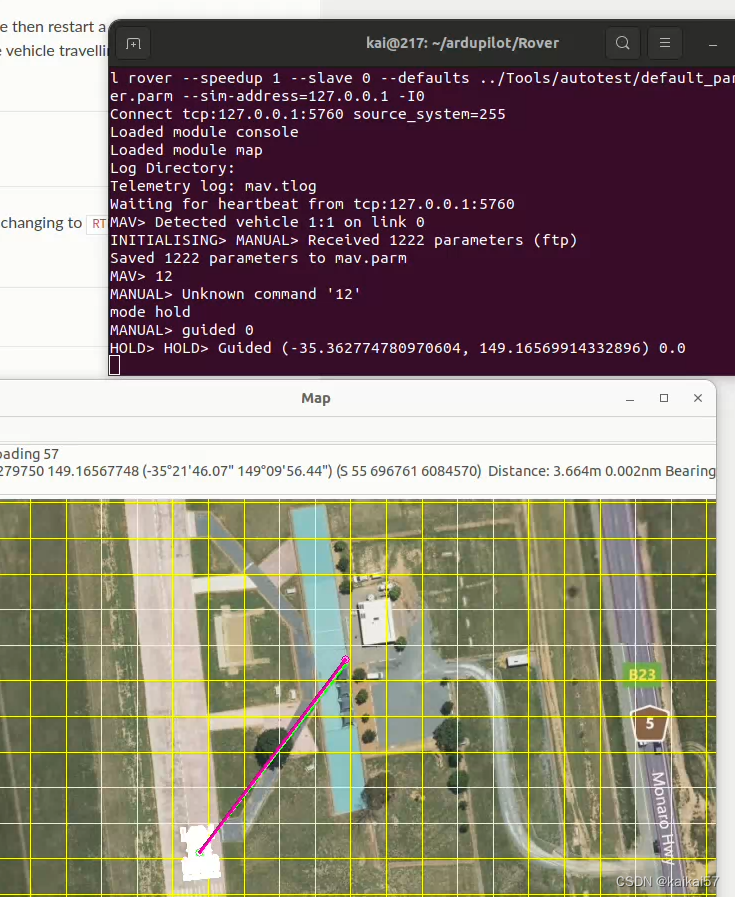
您也可以使用下面两种格式在命令行上手动输入目标位置。如果只指定高度,则使用最后指定的LAT/LON。
GUIDED> mode hold
HOLD> guided 0
GUIDED>
上边的指令应该是在这个红色的框框里输入。
总结
至于怎么动起来,我想明白在写上,如果有谁知道也可以私信我,感谢。

















 1396
1396

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









