







 本文档详细介绍了如何在Ubuntu Linux环境下配置ardupilot源码,为Rover小车编译固件,并通过USB接口直接将固件下载到硬件板上。主要步骤包括配置板子型号,执行编译命令以及使用USB进行固件更新。
本文档详细介绍了如何在Ubuntu Linux环境下配置ardupilot源码,为Rover小车编译固件,并通过USB接口直接将固件下载到硬件板上。主要步骤包括配置板子型号,执行编译命令以及使用USB进行固件更新。
目录
摘要
本节开始讲解如何编译配置Rover小车代码,并通过ubuntu命令直接通过USB 下载代码到自己的板子。
1.配置自己板子
./waf configure --board 板子name
例如:fmuv5,执行下面命令
./waf configure --board fmuv5
2.编译自己板子生成固件
./waf rover
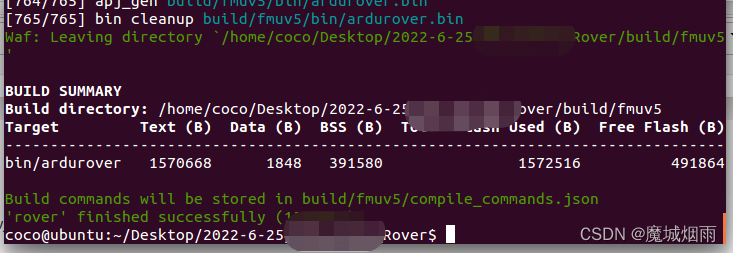
通过这个命令后,编译器可以编译出我们想要的固件,但是不能直接通过USB下载代码到我们的板子里面。
3.编译自己板子生成固件并直接通过USB下载到飞控
./waf --targets bin/ardurover --upload

通过这条命令后,直接通过USB连接就可以下载代码了。



















 1385
1385

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











