






产品为北京北斗星通导航技术股份有限公司得INS-D。
组合导航:位导(主天线,从天线,信号传输到黑盒子中)➕惯导(壳体子中带又IMU单元)。黑盒子中的数据输出端有com1、2、3三个端口,还有一个供电的两根线(地线和9-36v的线)。工作时需要通过这两根线来供电。
载体系的y轴指向前进方向,z轴垂直底面指向上方,是前进方向的右手边。
臂杆值为主从天线在载体系中的位置坐标,此外还有alpha,beta角度值具体定义参考pdf文档,
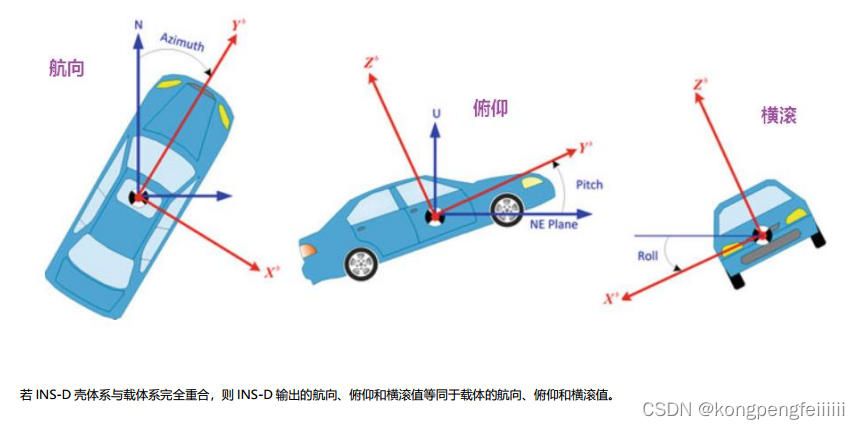
IMU可以获取壳体的横滚和俯仰角度,安装时主天线指向从天线的矢量与ins-d壳体系的y轴完全平行,那么双天线的航线就是壳体的航向,通过这种方法可以得出载体系的航向角。
安装时尽量使壳体(安装在车后背箱的后轴中心处)系与载体系重合。
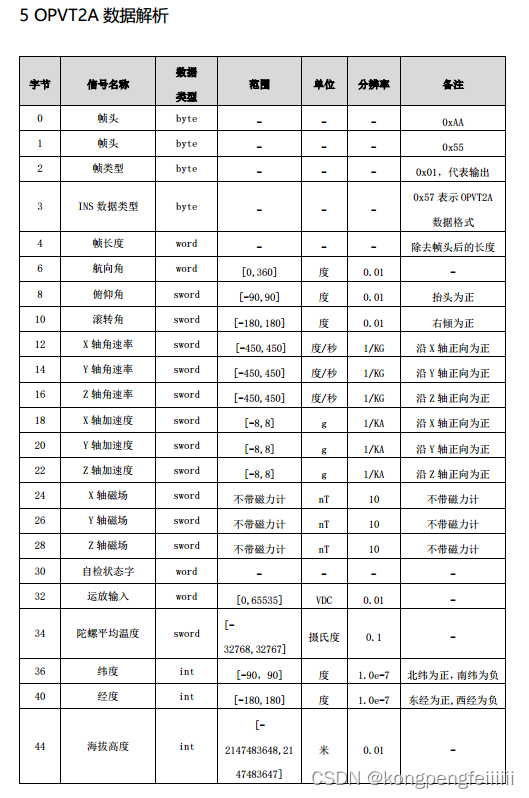
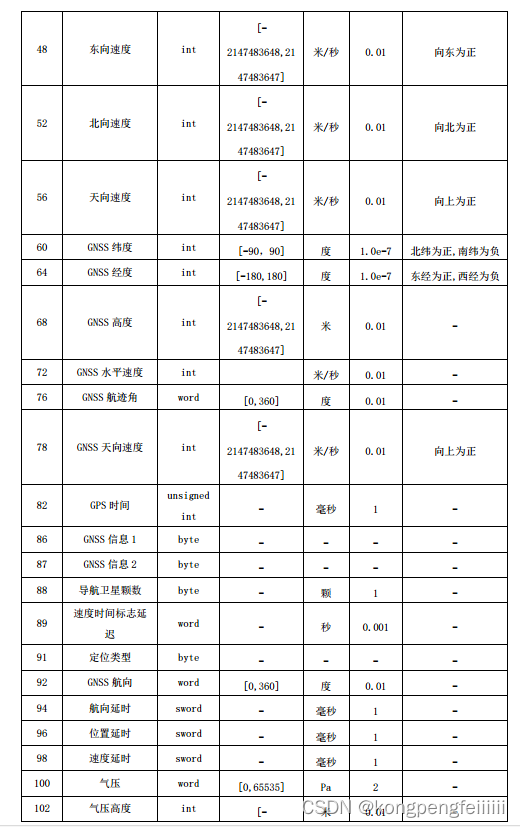
OPVT2A数据格式中,指的是绕壳体系中的XYZ轴的角速度。东北天向速度对应壳体在各个方向上的移动速度
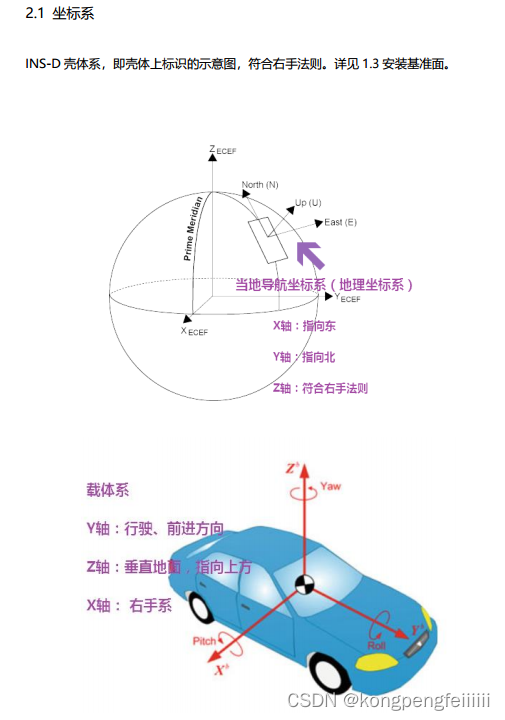
壳体系,载体系(车辆前进方向y轴,右手边x轴),当地导航坐标系(x轴东,y轴北,z轴天)。
ins-d所测得航向角实际是当地导航坐标系系的y轴与壳体系的y轴之夹角,所以当壳体系与载体系完全重合时,ind-s所输出的航向角等同于载体系的航向角。

















 1648
1648

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









