








示例选自ROS机器人程序设计(原书第2版)indigo源码
在书籍的第6章
1.新建工程
mkdir -p chapter6_tutorials/src
cd src
catkin_create_pkg chapter6_tutorials pcl_ros roscpp rospy sensor_msgs std_msgs
cd ..
catkin_make 2.编辑主函数pcl_create.cpp
内容如下
#include <ros/ros.h>
#include <pcl/point_cloud.h>
#include <pcl_conversions/pcl_conversions.h>
#include <sensor_msgs/PointCloud2.h>
main (int argc, char **argv)
{
ros::init (argc, argv, "pcl_create");
ros::NodeHandle nh;
ros::Publisher pcl_pub = nh.advertise<sensor_msgs::PointCloud2> ("pcl_output", 1);
pcl::PointCloud<pcl::PointXYZ> cloud;
sensor_msgs::PointCloud2 output;
// Fill in the cloud data
cloud.width = 100;
cloud.height = 1;
cloud.points.resize(cloud.width * cloud.height);
for (size_t i = 0; i < cloud.points.size (); ++i)
{
cloud.points[i].x = 1024 * rand () / (RAND_MAX + 1.0f);
cloud.points[i].y = 1024 * rand () / (RAND_MAX + 1.0f);
cloud.points[i].z = 1024 * rand () / (RAND_MAX + 1.0f);
}
//Convert the cloud to ROS message
pcl::toROSMsg(cloud, output);
output.header.frame_id = "odom";
ros::Rate loop_rate(1);
while (ros::ok())
{
pcl_pub.publish(output);
ros::spinOnce();
loop_rate.sleep();
}
return 0;
}3.编辑CMakeLists.txt
编辑/chapter6_tutorials/src/chapter6_tutorials路径下CMakeLists.txt加入
find_package(PCL REQUIRED)
include_directories(include${PCL_INCLUDE_DIRS})
link_directories(${PCL_LIBRARY_DIRS})
add_executable(pcl_create src/pcl_create.cpp)
target_link_libraries(pcl_create ${catkin_LIBRARIES} ${PCL_LIBRARIES})4.编译和在rviz中显示
编译
catkin_make 配置环境变量
source ./devel/setup.bash运行
rosrun chapter6_tutorials pcl_create打开rviz
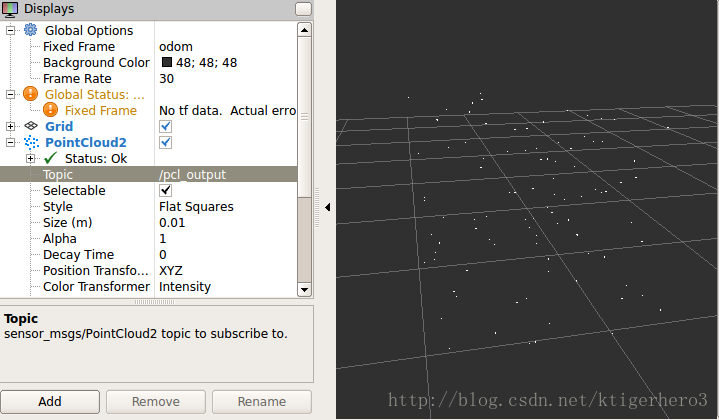
rosrun rviz rviz在rviz中增加PointCloud2d
topic 选 /pcl_output
fixed Frame 输入odom
如图















 1436
1436

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









