







在机器人仿真中, 经常会用到键盘控制程序teleop_twist_keyboard 对机器人进行控制。但是对各个键值是何种含义, 如何操作并没有任何资料介绍,初次使用时会不知所措。
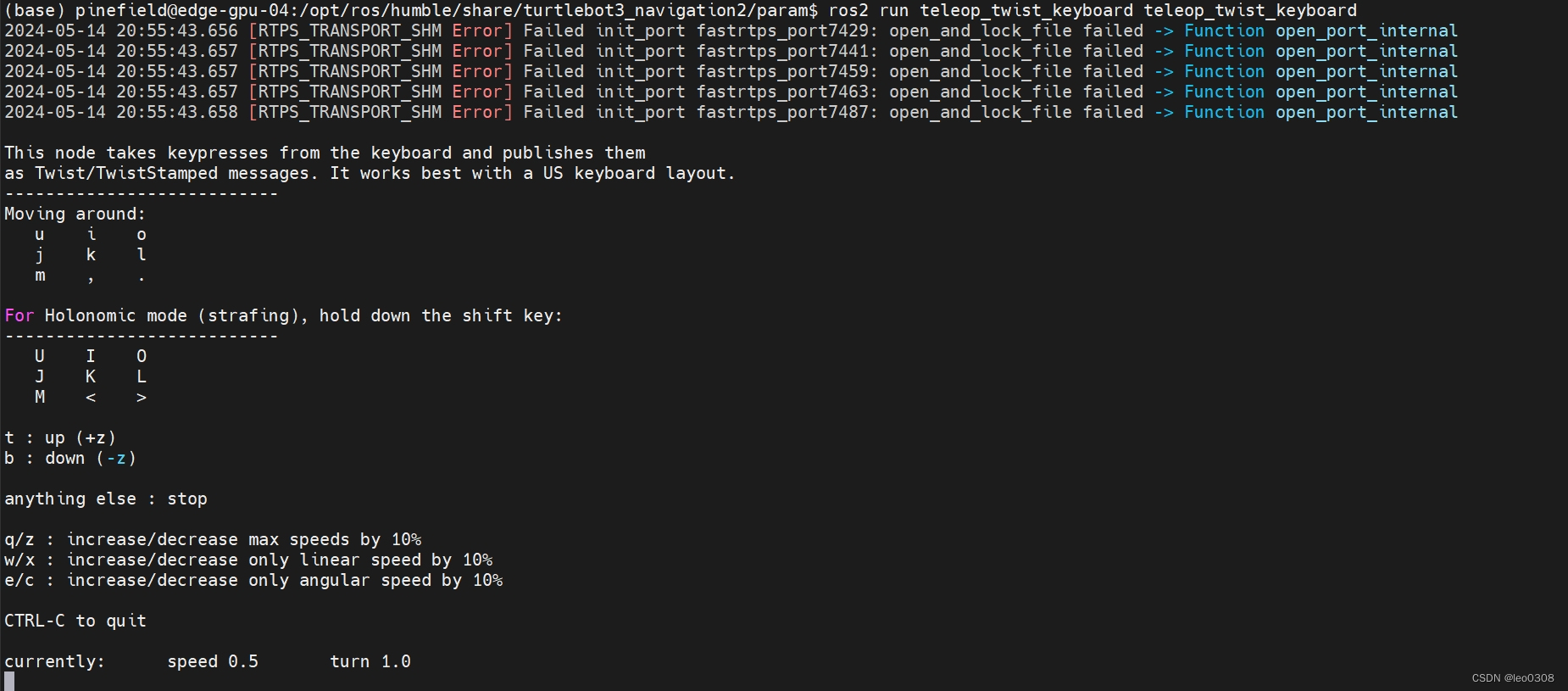
通过实践, 发现各个键值的作用如下:
u-- 向左前方前进
i-- 直行前进
o-- 向右前方前进
j-- 逆时针旋转
k-- 停止
l-- 顺时针旋转
m-- 向左后方后退
,-- 后退
. – 向右后方后退
q – 增加速度
z – 减小速度
操控小技巧: 开始操控不熟练时, 可以通过z 进行减速, 更容易控制。也可以用k键让机器人停止运动, 观察好了在让机器人运动。
注意进行扫描建图时, 尽量不要让机器人撞到障碍物, 非常影响建图精度。















 5567
5567

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









