







PX4模块设计之五:自定义MAVLink消息
基于PX4开源软件框架简明简介的框架设计,逐步分析内部模块功能设计。
MAVLink消息不像uORB消息,MAVLink(Micro Air Vehicle Link,微型空中飞行器链路通讯协议)是实际上一种链路通信协议,而在实际飞控中使用的时候通常基于无线硬件:433MHz的串行通信模块(UART) 或者 WiFi通信模块(UDP)等。
前面章节我们介绍了MAVLink简介,接下去我们介绍自定义MAVLink消息,因为这个才是实际开发过程中需要经常用到的,也就是将GCS地面站控制信息发送到飞控或者从飞控获得消息。
注:当然如果有伴飞电脑,两者之间的通信也可以采用MAVLink。不过MAVLink最初设计的时候是应用于低带宽,链路不稳定的场景。伴飞电脑通常是处理稳定高带宽的数据,比如:视频流等。
1. MAVLink Dialects
这里有必要首先提出Dialects的概念,可以认为是一种飞控与地面站之间的MAVLink协议。不同的飞控系统所使用的Dialects是不完全一样的。
根据MAVLink官网给出消息定义,目前主要是如下几种Dialects:
- ASLUAV.xml
- AVSSUAS.xml
- all.xml
- ardupilotmega.xml
- icarous.xml
- matrixpilot.xml
- paparazzi.xml
- python_array_test.xml
- storm32.xml
- uAvionix.xml
- ualberta.xml
根据/mavlink/messages/1.0和源代码目录整理内容如下:
目录结构 //对应上面官网提供的Dialects种类
.
├── ASLUAV.xml
├── AVSSUAS.xml
├── ardupilotmega.xml
├── icarous.xml
├── matrixpilot.xml
├── paparazzi.xml
├── python_array_test.xml
├── storm32.xml
├── uAvionix.xml
├── ualberta.xml
/* 分隔,用于解释说明:标准或者核心定义,目前看standard和common的概念有点模糊,代码是standard包含common,而官方定义是common包含standard;详见下面两个Dialects的分析 */
├── minimal.xml //the minimum set of entities (messages, enums, MAV_CMD) required to set up a MAVLink network.
├── standard.xml
├── common.xml
/* 分隔,用于解释说明 */
├── test.xml //Test XML definition file.
├── all.xml //This includes all other XML files, and is used to verify that there are no ID clashes (and can potentially be used by GCS to communicate with any core dialect).
/* 分隔,用于解释说明 */
└── development.xml
0 directories, 16 files
注:接下来我们针对比较熟悉的两个Dialects进行整理。
1.1 PX4 Dialects
development.xml version=0
├──> include standard.xml
│ └──> include common.xml
│ └──> include minimal.xml
├──> enums
│ ├──> WIFI_NETWORK_SECURITY
│ ├──> AIRSPEED_SENSOR_TYPE
│ ├──> PARAM_TRANSACTION_TRANSPORT
│ ├──> PARAM_TRANSACTION_ACTION
│ ├──> MAV_STANDARD_MODE
│ └──> MAV_CMD
└──> messages
├──> 19 PARAM_ACK_TRANSACTION
├──> 52 MISSION_CHANGED
├──> 53 MISSION_CHECKSUM
├──> 295 AIRSPEED
├──> 298 WIFI_NETWORK_INFO
├──> 361 FIGURE_EIGHT_EXECUTION_STATUS
├──> 396 COMPONENT_INFORMATION_BASIC
├──> 414 GROUP_START
├──> 415 GROUP_END
├──> 435 AVAILABLE_MODES
└──> 436 CURRENT_MODE
1.2 Paprazzi Dialects
paparazzi.xml version=3
├──> include standard.xml
│ └──> include common.xml
│ └──> include minimal.xml
└──> messages
├──> 180 SCRIPT_ITEM
├──> 181 SCRIPT_REQUEST
├──> 182 SCRIPT_REQUEST_LIST
├──> 183 SCRIPT_COUNT
└──> 184 SCRIPT_CURRENT
1.3 MAVLink XML File Format
- include: 引用其他XML定义
- version: Dialects的版本信息,用于HEARTBEAT中的mavlink_version字段
- dialect: TBD
- enums: Dialects的特定枚举值
- messages: Dialects的特定消息
注1:当XML抽象及标准后,就升级到了类似minimal.xml/standard.xml/common.xml的位置。
注2:基于这种概念,我认为官网给出的common包含standard再包含minimal是比较合适的(实际代码并非如此)。
<?xml version="1.0"?>
<mavlink>
<include>common.xml</include>
<include>other_dialect.xml</include>
<!-- NOTE: If the included file already contains a version tag, remove the version tag here, else uncomment to enable. -->
<!-- <version>6</version> -->
<dialect>8</dialect>
<enums>
<!-- Enums are defined here (optional) -->
</enums>
<messages>
<!-- Messages are defined here (optional) -->
</messages>
</mavlink>
2. 添加自定义MAVLink消息
注:这里我们借用PX4的例子src/examples/px4_mavlink_debug,但是我们会将每个步骤都清清楚楚明明白白的给大家整理出来。
2.1 步骤1:确认飞控代码使用的MAVLink Dialects
默认配置使用/src/modules/mavlink/CMakeLists.txt文件内的变量MAVLINK_DIALECT定义为:development
34 set(MAVLINK_DIALECT "development") # standard, development, etc
因此,代码将会使用的是/mavlink/messages/1.0/下的development配置文件development.xml
2.2 步骤3:新增uORB自定义消息
该步骤可参考PX4模块设计之三:自定义uORB消息。
注:这里使用了一个例子,我们给出找到的位置和代码msg/debug_vect.msg。
1 uint64 timestamp # time since system start (microseconds)
2 char[10] name # max. 10 characters as key / name
3 float32 x # x value
4 float32 y # y value
5 float32 z # z value
2.3 步骤3:建立uORB与MAVLink消息映射关系
| MAVLink message | uORB topic |
|---|---|
| DEBUG_VECT | debug_vect |
2.4 步骤4:新增MAVLink自定义XML消息
注:这里使用了一个例子,我们给出找到的位置和代码src/modules/mavlink/mavlink/message_definitions/v1.0/common.xml。
6521 <message id="250" name="DEBUG_VECT">
6522 <description>To debug something using a named 3D vector.</description>
6523 <field type="char[10]" name="name" instance="true">Name</field>
6524 <field type="uint64_t" name="time_usec" units="us">Timestamp (UNIX Epoch time or time since system boot). The receiving end can infer timestamp format (since 1.1.1970 or since system boot) by checking for the magnitude of the number.</field>
6525 <field type="float" name="x">x</field>
6526 <field type="float" name="y">y</field>
6527 <field type="float" name="z">z</field>
6528 </message>
2.5 步骤5:新增MAVLink自定义MavlinkStreamDebugVect消息类
注:这里使用了一个例子,我们给出找到的位置和代码src/modules/mavlink/streams/DEBUG_VECT.hpp
/****************************************************************************
*
* Copyright (c) 2020 PX4 Development Team. All rights reserved.
*
* Redistribution and use in source and binary forms, with or without
* modification, are permitted provided that the following conditions
* are met:
*
* 1. Redistributions of source code must retain the above copyright
* notice, this list of conditions and the following disclaimer.
* 2. Redistributions in binary form must reproduce the above copyright
* notice, this list of conditions and the following disclaimer in
* the documentation and/or other materials provided with the
* distribution.
* 3. Neither the name PX4 nor the names of its contributors may be
* used to endorse or promote products derived from this software
* without specific prior written permission.
*
* THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS
* "AS IS" AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT
* LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS
* FOR A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE
* COPYRIGHT OWNER OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT,
* INCIDENTAL, SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING,
* BUT NOT LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS
* OF USE, DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED
* AND ON ANY THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT
* LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN
* ANY WAY OUT OF THE USE OF THIS SOFTWARE, EVEN IF ADVISED OF THE
* POSSIBILITY OF SUCH DAMAGE.
*
****************************************************************************/
#ifndef DEBUG_VECT_HPP
#define DEBUG_VECT_HPP
#include <uORB/topics/debug_vect.h>
class MavlinkStreamDebugVect : public MavlinkStream
{
public:
static MavlinkStream *new_instance(Mavlink *mavlink) { return new MavlinkStreamDebugVect(mavlink); }
static constexpr const char *get_name_static() { return "DEBUG_VECT"; }
static constexpr uint16_t get_id_static() { return MAVLINK_MSG_ID_DEBUG_VECT; }
const char *get_name() const override { return get_name_static(); }
uint16_t get_id() override { return get_id_static(); }
unsigned get_size() override
{
return _debug_sub.advertised() ? MAVLINK_MSG_ID_DEBUG_VECT_LEN + MAVLINK_NUM_NON_PAYLOAD_BYTES : 0;
}
private:
explicit MavlinkStreamDebugVect(Mavlink *mavlink) : MavlinkStream(mavlink) {}
uORB::Subscription _debug_sub{ORB_ID(debug_vect)};
bool send() override
{
debug_vect_s debug;
if (_debug_sub.update(&debug)) {
mavlink_debug_vect_t msg{};
msg.time_usec = debug.timestamp;
memcpy(msg.name, debug.name, sizeof(msg.name));
msg.name[sizeof(msg.name) - 1] = '\0'; // enforce null termination
msg.x = debug.x;
msg.y = debug.y;
msg.z = debug.z;
mavlink_msg_debug_vect_send_struct(_mavlink->get_channel(), &msg);
return true;
}
return false;
}
};
#endif // DEBUG_VECT_HPP
2.5 步骤5:新增MavlinkStreamDebugVect类到mavlink_messages.cpp
注:这里使用了一个例子,我们给出找到的位置和代码src/modules/mavlink/mavlink_messages.cpp
127 # include "streams/DEBUG_VECT.hpp"
466 #if defined(DEBUG_VECT_HPP)
467 create_stream_list_item<MavlinkStreamDebugVect>(),
468 #endif // DEBUG_VECT_HPP
2.6 步骤6:完成debug_vect的uORB自定义消息发布DEMO
该步骤可参考PX4模块设计之三:自定义uORB消息。
注:这里使用了一个例子,我们给出找到的位置和代码src/examples/px4_mavlink_debug/px4_mavlink_debug.cpp,这里使用的是内部模块,所以相对来说工程更加简单。
/****************************************************************************
*
* Copyright (c) 2012-2015 PX4 Development Team. All rights reserved.
*
* Redistribution and use in source and binary forms, with or without
* modification, are permitted provided that the following conditions
* are met:
*
* 1. Redistributions of source code must retain the above copyright
* notice, this list of conditions and the following disclaimer.
* 2. Redistributions in binary form must reproduce the above copyright
* notice, this list of conditions and the following disclaimer in
* the documentation and/or other materials provided with the
* distribution.
* 3. Neither the name PX4 nor the names of its contributors may be
* used to endorse or promote products derived from this software
* without specific prior written permission.
*
* THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS
* "AS IS" AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT
* LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS
* FOR A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE
* COPYRIGHT OWNER OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT,
* INCIDENTAL, SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING,
* BUT NOT LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS
* OF USE, DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED
* AND ON ANY THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT
* LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN
* ANY WAY OUT OF THE USE OF THIS SOFTWARE, EVEN IF ADVISED OF THE
* POSSIBILITY OF SUCH DAMAGE.
*
****************************************************************************/
/**
* @file px4_mavlink_debug.cpp
* Debug application example for PX4 autopilot
*
* @author Example User <mail@example.com>
*/
#include <px4_platform_common/px4_config.h>
#include <unistd.h>
#include <stdio.h>
#include <string.h>
#include <poll.h>
#include <systemlib/err.h>
#include <drivers/drv_hrt.h>
#include <uORB/uORB.h>
#include <uORB/topics/debug_key_value.h>
#include <uORB/topics/debug_value.h>
#include <uORB/topics/debug_vect.h>
#include <uORB/topics/debug_array.h>
extern "C" __EXPORT int px4_mavlink_debug_main(int argc, char *argv[]);
int px4_mavlink_debug_main(int argc, char *argv[])
{
printf("Hello Debug!\n");
/* advertise named debug value */
struct debug_key_value_s dbg_key;
strncpy(dbg_key.key, "velx", 10);
dbg_key.value = 0.0f;
orb_advert_t pub_dbg_key = orb_advertise(ORB_ID(debug_key_value), &dbg_key);
/* advertise indexed debug value */
struct debug_value_s dbg_ind;
dbg_ind.ind = 42;
dbg_ind.value = 0.5f;
orb_advert_t pub_dbg_ind = orb_advertise(ORB_ID(debug_value), &dbg_ind);
/* advertise debug vect */
struct debug_vect_s dbg_vect;
strncpy(dbg_vect.name, "vel3D", 10);
dbg_vect.x = 1.0f;
dbg_vect.y = 2.0f;
dbg_vect.z = 3.0f;
orb_advert_t pub_dbg_vect = orb_advertise(ORB_ID(debug_vect), &dbg_vect);
/* advertise debug array */
struct debug_array_s dbg_array;
dbg_array.id = 1;
strncpy(dbg_array.name, "dbg_array", 10);
orb_advert_t pub_dbg_array = orb_advertise(ORB_ID(debug_array), &dbg_array);
int value_counter = 0;
while (value_counter < 100) {
uint64_t timestamp_us = hrt_absolute_time();
/* send one named value */
dbg_key.value = value_counter;
dbg_key.timestamp = timestamp_us;
orb_publish(ORB_ID(debug_key_value), pub_dbg_key, &dbg_key);
/* send one indexed value */
dbg_ind.value = 0.5f * value_counter;
dbg_ind.timestamp = timestamp_us;
orb_publish(ORB_ID(debug_value), pub_dbg_ind, &dbg_ind);
/* send one vector */
dbg_vect.x = 1.0f * value_counter;
dbg_vect.y = 2.0f * value_counter;
dbg_vect.z = 3.0f * value_counter;
dbg_vect.timestamp = timestamp_us;
orb_publish(ORB_ID(debug_vect), pub_dbg_vect, &dbg_vect);
/* send one array */
for (size_t i = 0; i < debug_array_s::ARRAY_SIZE; i++) {
dbg_array.data[i] = value_counter + i * 0.01f;
}
dbg_array.timestamp = timestamp_us;
orb_publish(ORB_ID(debug_array), pub_dbg_array, &dbg_array);
warnx("sent one more value..");
value_counter++;
px4_usleep(500000);
}
return 0;
}
3. 测试验证效果
3.1 编译+运行
$ make px4_sitl jmavsim
pxh> px4_mavlink_debug
Hello Debug!
WARN [px4_mavlink_debug] sent one more value..
WARN [px4_mavlink_debug] sent one more value..
WARN [px4_mavlink_debug] sent one more value..
...
3.2 QGroundControl查看
按照PX4开发环境搭建–模拟器编译及QGroundControl & RC遥控模拟配置方式链接sitl模拟飞控。
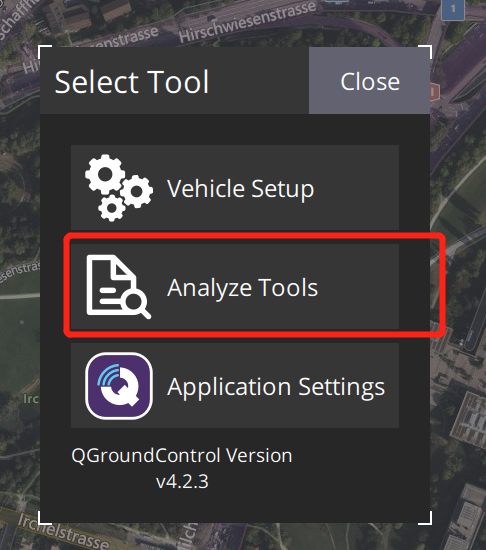
然后,选择Analyze Tools
 再选择MAVLink Inspector
再选择MAVLink Inspector
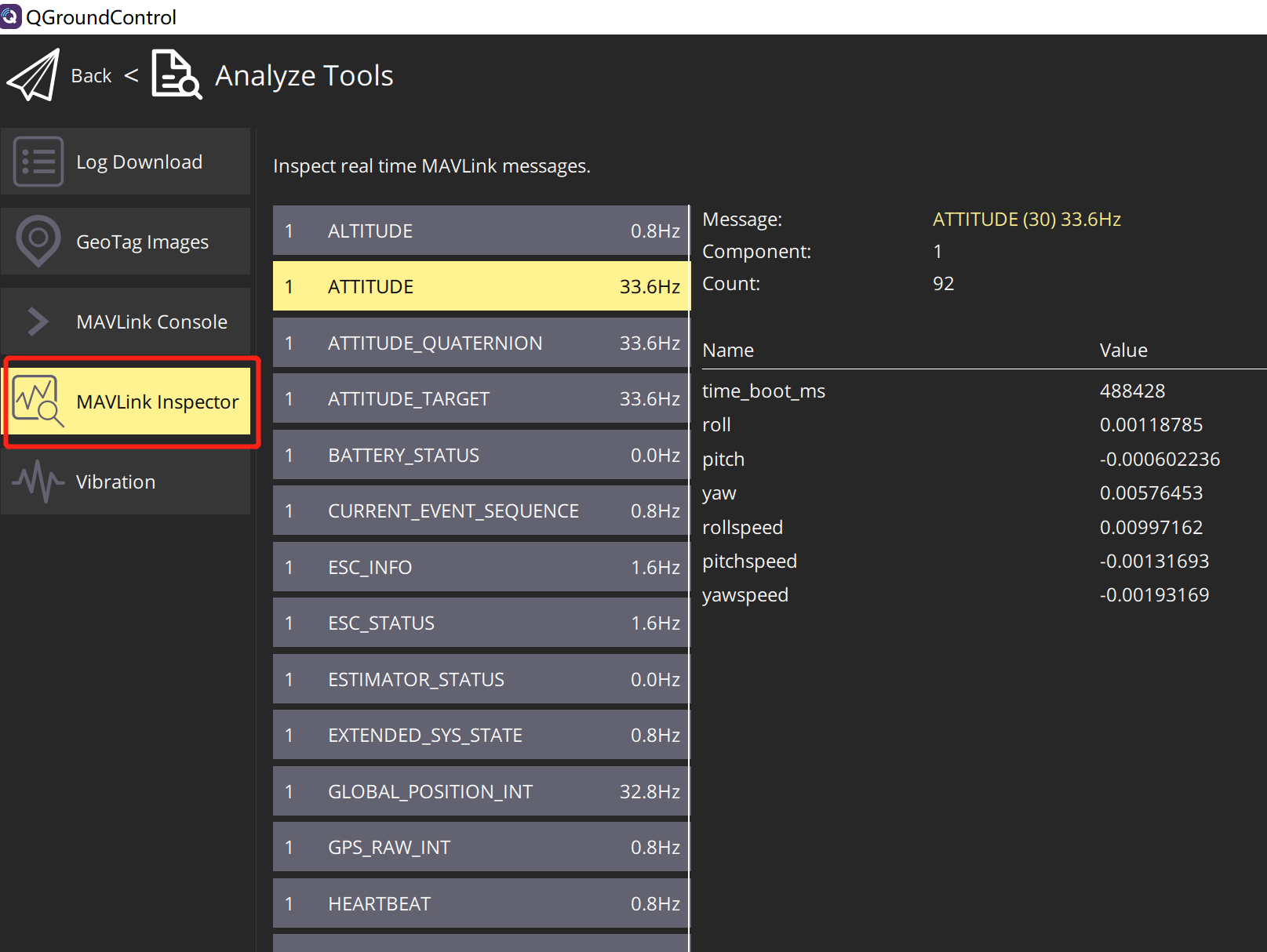 message是按照字母序排列的,没有DEBUG相关的消息信息。
message是按照字母序排列的,没有DEBUG相关的消息信息。
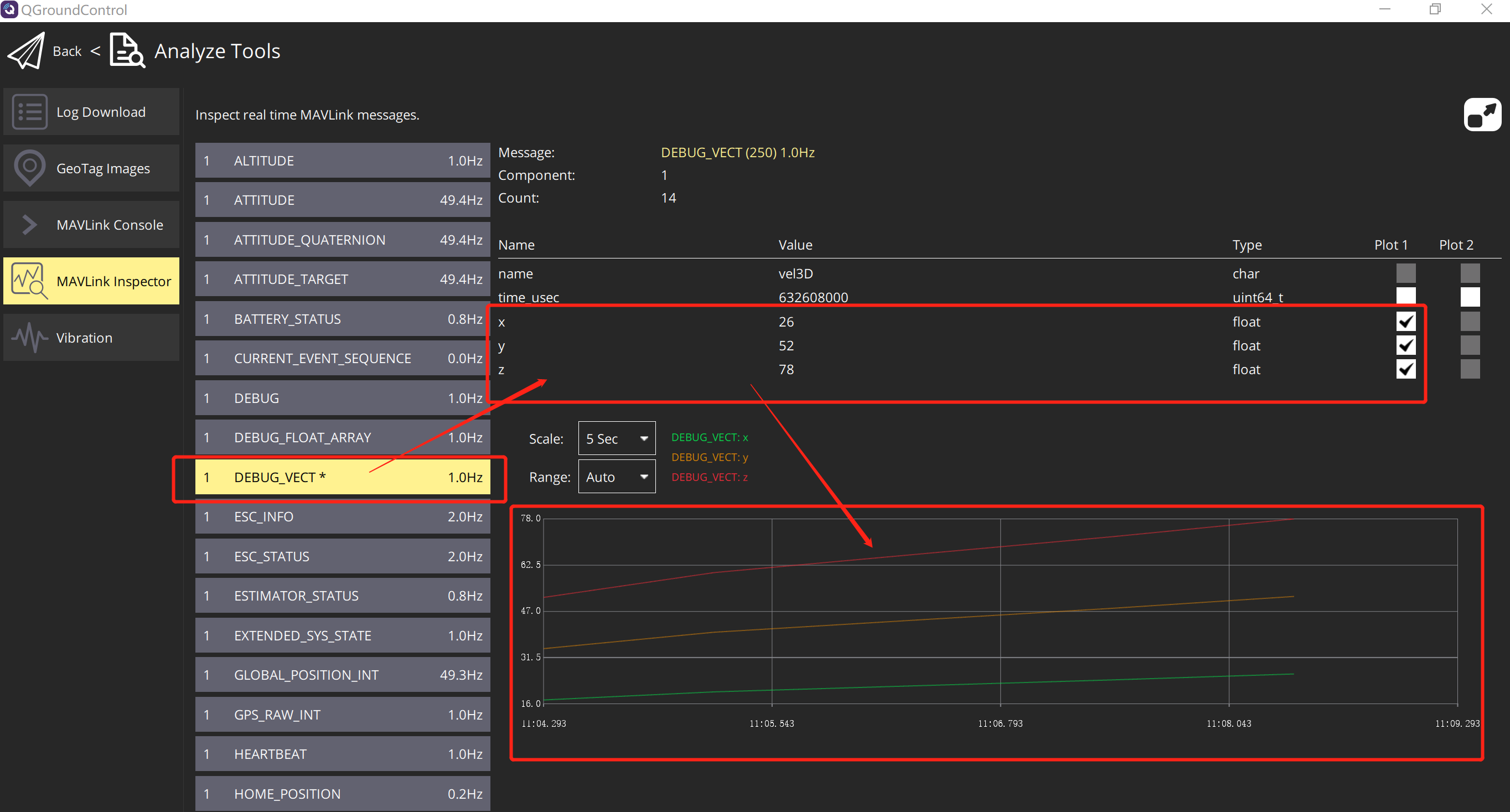
当运行px4_mavlink_debug程序,我们可以看到DEBUG_VECT消息收到。
4. 参考资料
【1】MAVLink Messaging
【2】MAVLink Developer Guide
【3】MAVLink XML File Schema/Format

















 2512
2512

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









