









Ardupilot开源代码之Rover上路 - 后续4
1. 源由
开源项目最主要的问题就是所有配置是开放式的,程序是迭代式开发的。
尤其随着技术的层出不穷,应用领域和范围的不断拓展,深度配置随着情况不同会遇到各种阻碍。
好了,接下来我们就总结下关于几个比较繁琐的配置问题。
2. 深度配置
2.1 设置倒车按钮
类似汽车的操作:
- 默认前进挡:深踩油门,加速前进
- 挂倒挡:深踩油门,加速后退
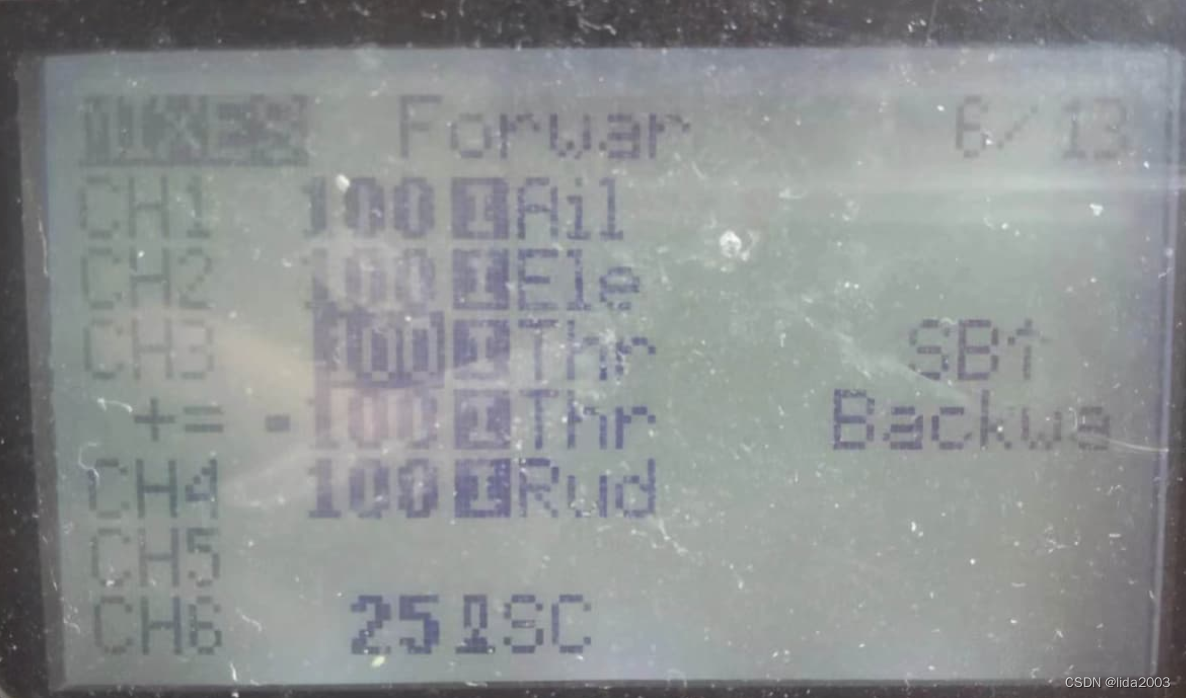
OpenTX12:Thr + SB
2.1.1 前进
- SB默认位置,Low
- Throttle油门往前推前进,拉到最低位置无油门输入

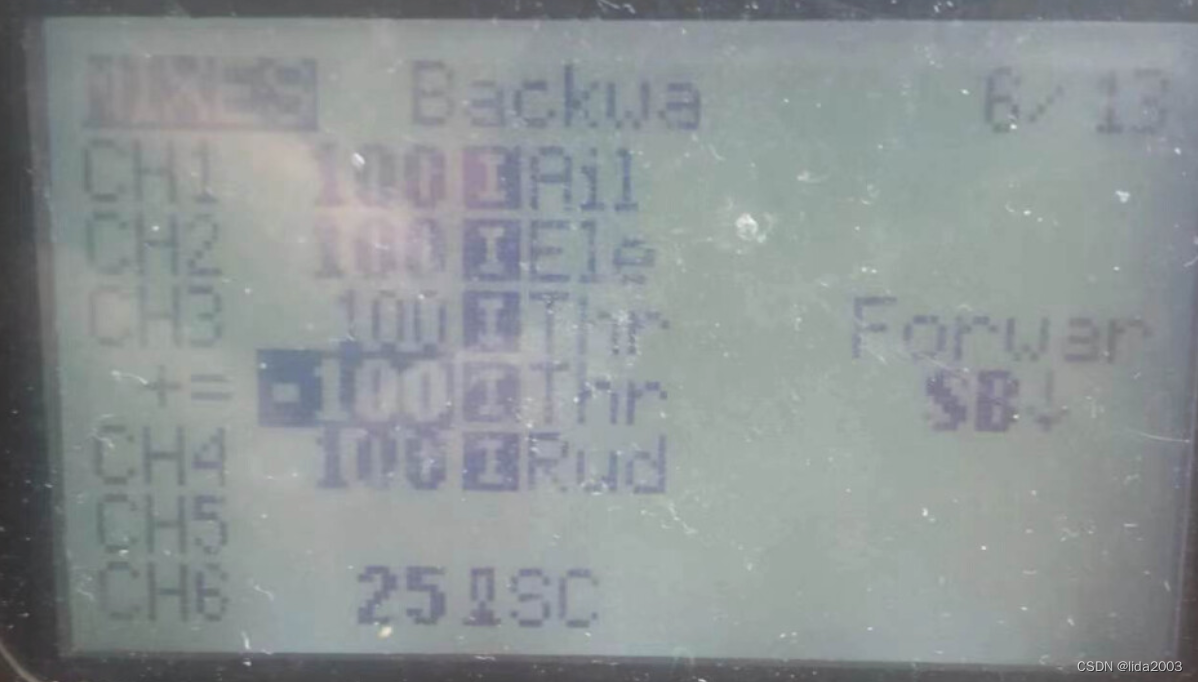
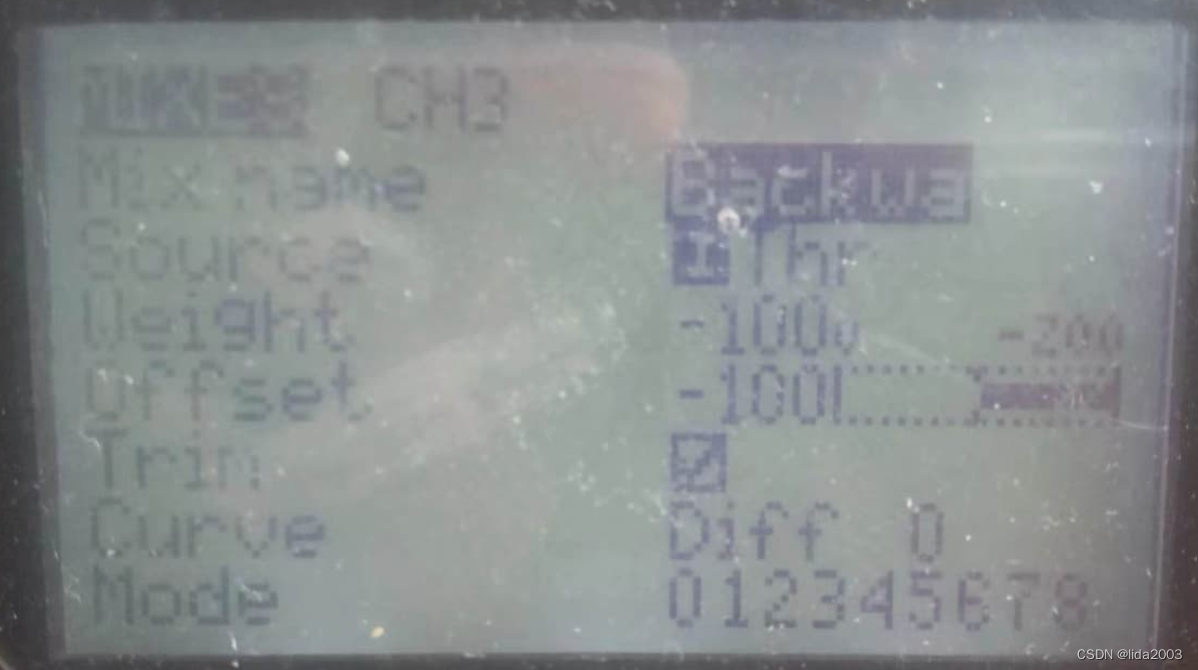
2.1.2 倒退
- SB,High
- Throttle油门往前推后退,拉到最低位置无油门输入
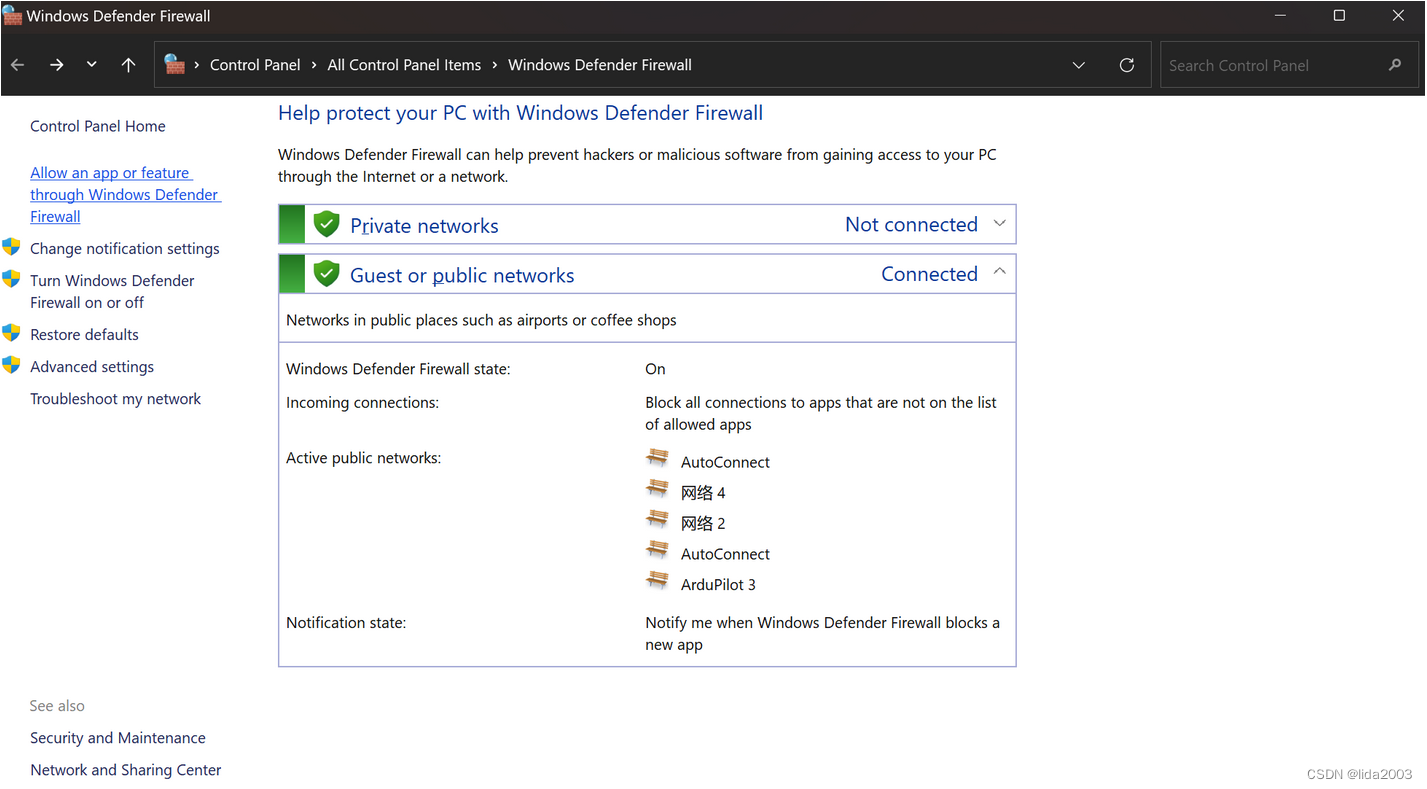
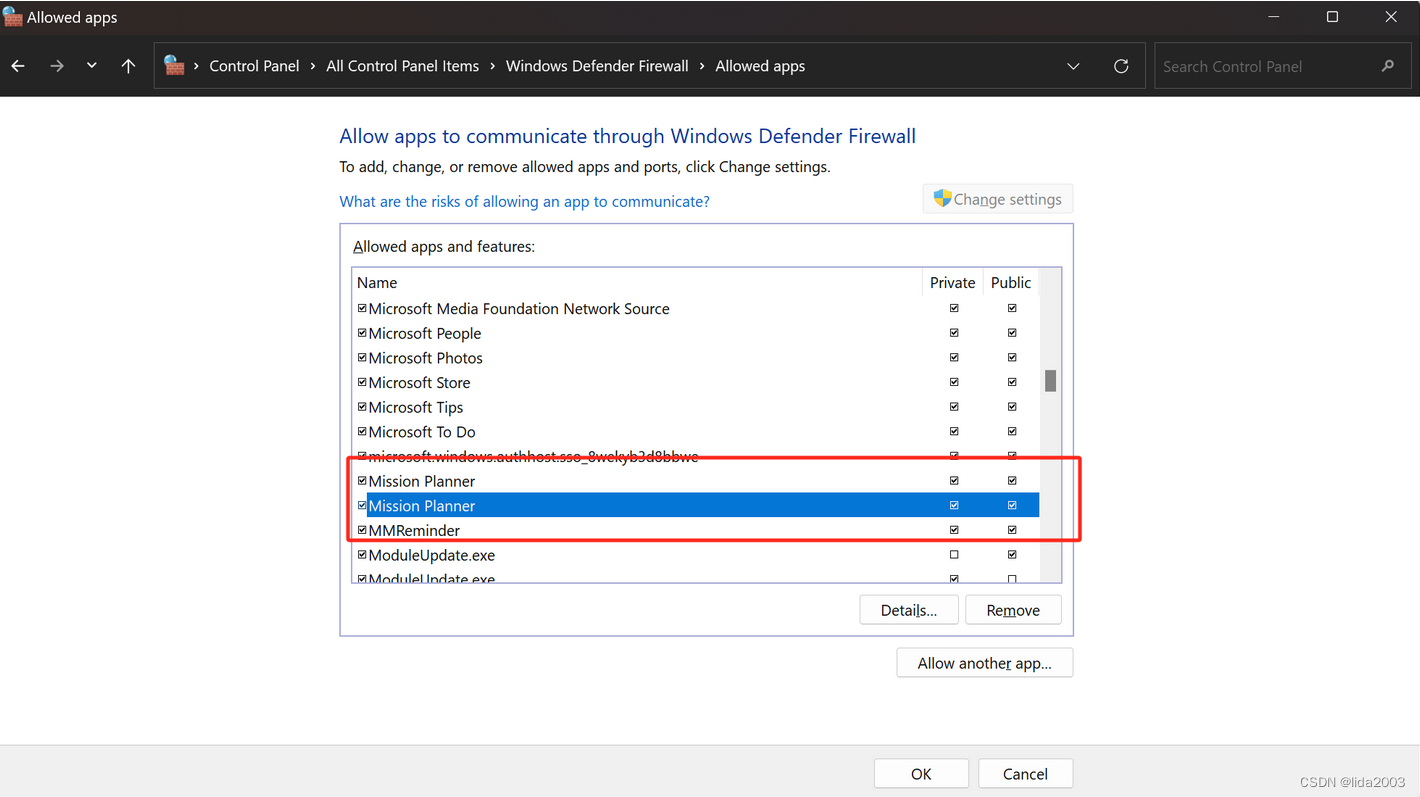
2.2 MP无法连接ESP8266
最终问题找到,防火墙配置导致Mission Planner无法与ESP32模块进行WiFi通信。
相关资料可以在这里找到:
注:有伴机电脑通信以后,一般都用QGC进行收集操作,很少用Mission Planner。
- 4.3 DEV can’t connect thru esp8266 wifi
- ESP8266 WiFi connection
- 64bit Windows 11 + MP 1.3.81 Can’t UDP connect 8266WiFi module (v1.2.3) #3356
2.3 最小油门校准
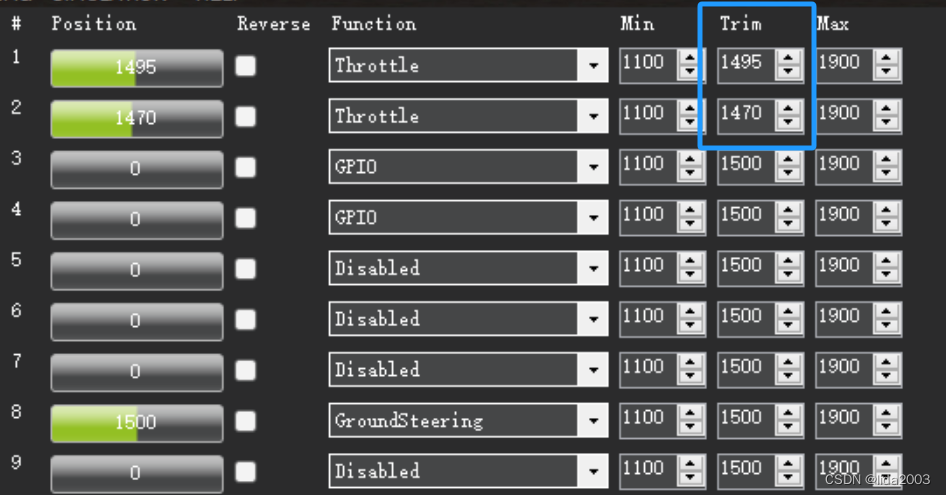
经过测试,上述设置可以两边18%油门同时转起来,因此设置MOT_THR_MIN = 18

2.4 4G高增益天线
越靠近地面信号发射接收越不易,所以:
- 增加高度
- 增加天线增益
期望拥有更好的信号。

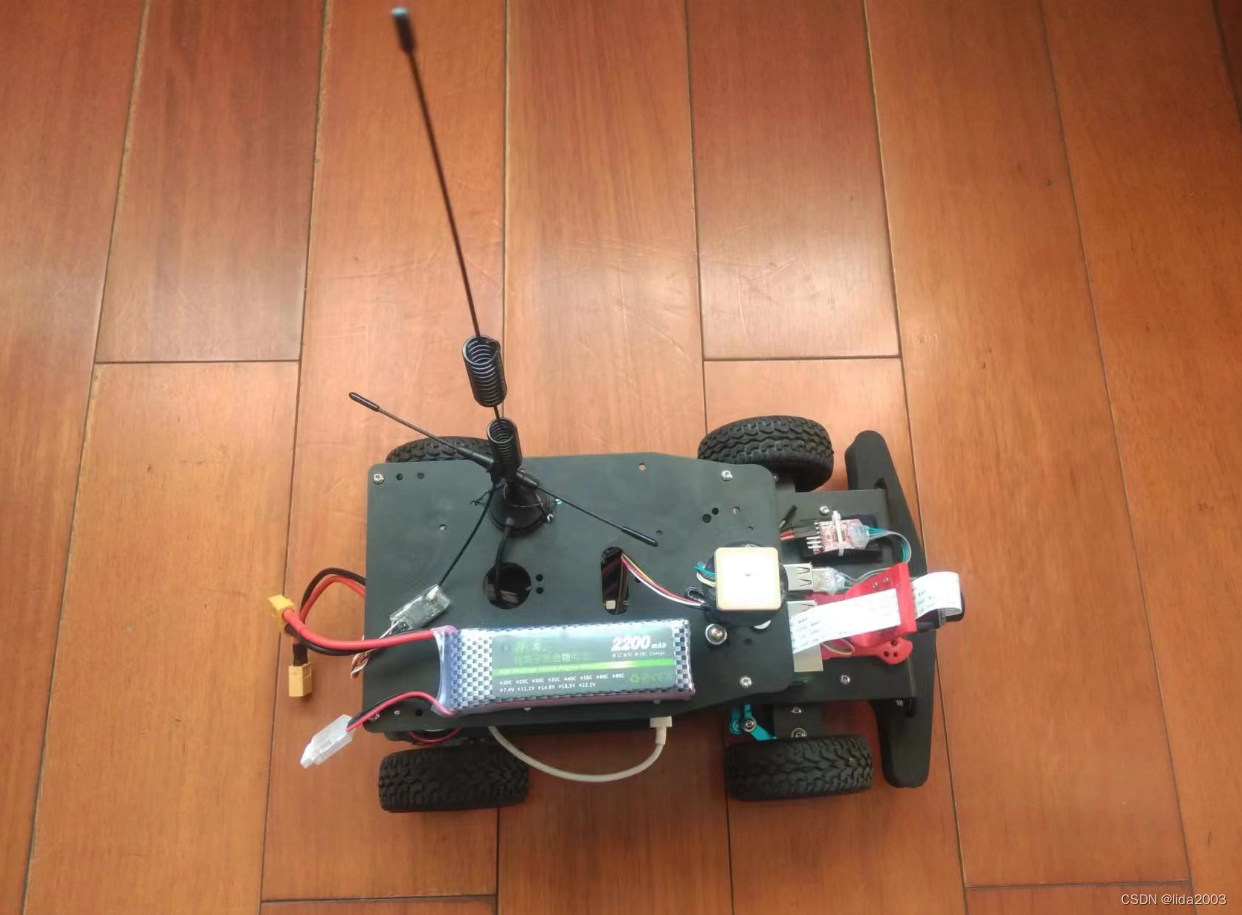
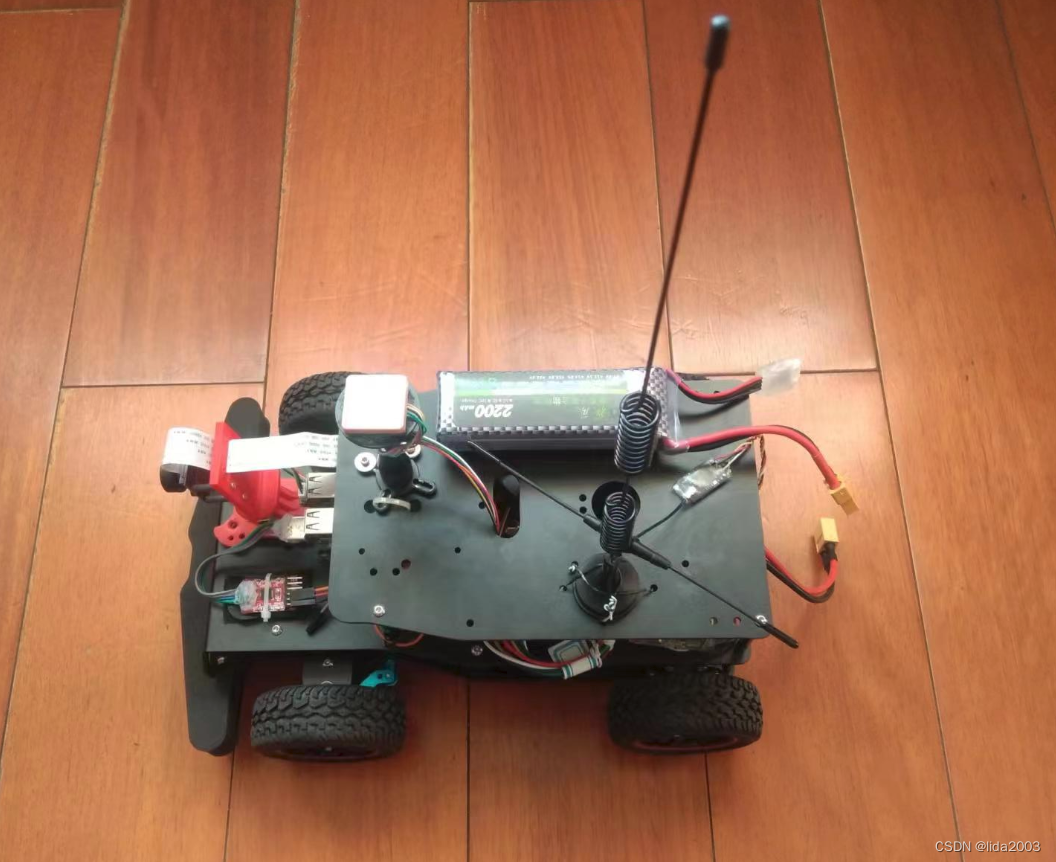
3. 整车外观
4. 遗留&后续
4.1 高精度编码器问题
OpenCTR采用的是STM32 F407,当前采用的H743性能应该远高于407。所以是否有进一步提升的空间,这个可能需要结构代码架构,以及内部设计进行讨论。
但是,这个不影响我们出去浪了。。。。。
4.2 OV5647 720P@30FPS 马赛克问题
希望通过增加ISO、Shutter Speed、Exposure Mode等参数进行调整,测试是否有所改善。
注:目前测试的IMX219摄像头也是类似情况!
4.3 QGC Rover行驶速度无法显示
虽然GPS定位没有,但是好歹也是有个编码器在上面,因此行驶速度应该是能够知道的。所以,理论上有两个速度来源:GPS、编码器。
5. 参考资料
【1】Ardupilot开源代码之Rover上路计划
【2】Ardupilot开源代码之Rover上路 - 后续1
【3】Ardupilot开源代码之Rover上路 - 后续2
【4】Ardupilot开源代码之Rover上路 - 后续3
6. 补充 - 固件
有朋友问Rover的固件哪里可以下载,官网是可以去获取,不过因为笔者配置可能和官网略有差别,这里将连接提供给需要的朋友。















 739
739











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









