






目录
安装vscode
Visual Studio Code - Code Editing. Redefined 官网下载deb
sudo dpkg -i code_xxxx.deb //就会打开 继续配置插件:Ubuntu18.04安装和使用VS Code_ubuntu安装scode_TT努力填坑的博客-CSDN博客
ctrl+shift+x 打开左侧扩展 安装c++|python|ros



安装opencv
安装依赖:
sudo apt-get install build-essential libgtk2.0-dev libavcodec-dev libavformat-dev libjpeg-dev libswscale-dev libtiff5-dev
sudo apt-get install libgtk2.0-dev
sudo apt-get install pkg-config
参考赵总:安装ros之后自带opencv3.2版本,最好先查看他的文件分布再说,比如有无pkgconfig文件夹,有无opencv.pc,以及他的libopencv的库放在哪里。双系统安装Ubuntu配置ROS,Qt,OpenCV,并安装搜狗输入法与微信。_zyyyxxxxx的博客-CSDN博客
Releases - OpenCV 下载source版本
#先解压
mkdir build
cd build
cmake -D CMAKE_BUILD_TYPE=Release -D CMAKE_INSTALL_PREFIX=/usr/local -D OPENCV_GENERATE_PKGCONFIG=ON ..//不要加sudo 会导致有些目录的所有者是root 最后一个选项用来生成opencv.pc
//(可用sudo updatedb
locate opencv.pc查看)
//make -j
make
sudo make install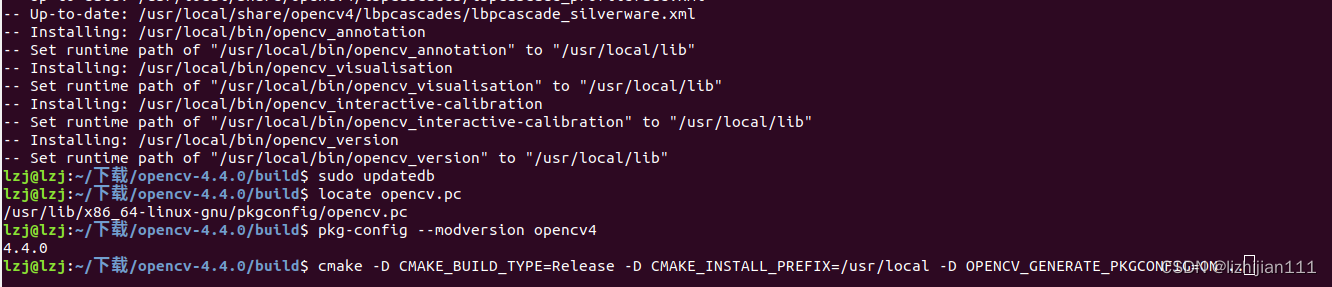
查看/usr/local/lib下是否有pkgconfig包,然后修改环境变量
sudo gedit /etc/ld.so.conf.d/opencv.conf
#在文本中写入:/usr/local/lib
sudo ldconfig
sudo gedit /etc/bash.bashrc
#文本中复制写入下面两行
PKG_CONFIG_PATH=$PKG_CONFIG_PATH:/usr/local/lib/pkgconfig
export PKG_CONFIG_PATH
source /etc/bash.bashrc查看版本 pkg-config --modversion opencv4 |找不到包看下面这篇Package opencv was not found in the pkg-config search path. Perhaps you should add the directory con_Yuan-fei的博客-CSDN博客
安装Cmake
已经安装ros,自带cmake 3.10 可通过cmake --version查看|存在/usr/bin/cmake下,自己安装的cmake在/usr/local/bin/cmakeCMake 安装升级更高版本,CMake 3.19.2 or higher is required. You are running version 3.10.2_一颗温暖的心_lucky的博客-CSDN博客
Linux的环境变量的读取顺序_向日葵骑士Faraday的博客-CSDN博客_linux 找环境变量顺序
Download | CMake 下载源码
#解压并且
./configure
make
sudo make install
#软链接
sudo ln -sf /usr/local/bin/cmake /usr/bin
安装微信
[ubuntu][原创]ubuntu18.04安装微信最简单方法2022年_FL1623863129的博客-CSDN博客_ubuntu18.04安装微信
去这下载deb,运行下面两条命令:
sudo apt-get install -f -y ./ukylin-wine_70.6.3.25_amd64.deb
sudo apt-get install -f -y ./ukylin-wechat_3.0.0_amd64.deb
//修改字体
env WINEPREFIX="$HOME/.ukylin-wine/wechat"
/usr/bin/ukylin-wine winecfg
安装qqmusic
QQ音乐下载页 - QQ音乐,音乐你的生活! 去官网下载linux版本的deb
sudo dpkg -i qqxxxx.deb
#启动
qqmusic更换镜像源
更换镜像源可以加快下载速度:Ubuntu18.04换源_Believe yourself!!!的博客-CSDN博客_ubuntu18.04换源
可以查看 软件和更新
同步时间
ubuntu系统和windows系统的时间获取机制不一样,会有时间差,所以需要同步时间!
Windows 和 Ubuntu 双系统的安装和卸载_哔哩哔哩_bilibili
#安装时间同步工具
sudo apt install ntpdate
#
sudo ntpdate time.windows.com
sudo hwclock --localtime --systohc启动菜单默认项
即设置默认启动项为windows
Windows 和 Ubuntu 双系统的安装和卸载_哔哩哔哩_bilibili
sudo gedit /etc/default/grub
#把GRUB——DEFAULT = 0 的0改成启动界面windows的序号,从0开始 然后保存
sudo update-grub
声音设置
解决ubuntu18.04听不到声音(很简单,不用每次开机都调)_群酱的博客-CSDN博客_ubuntu没有声音
#安装&打开
sudo apt install pavucontrol
pavucontrol安装搜狗输入法(没装上)
搜狗输入法 for linux 安装指南(搜狗输入法安装在Ubuntu虚拟机中的方法)_人生如路兮的博客-CSDN博客解决Ubuntu18.04搜狗输入法无法使用的问题_ourjaycn的博客-CSDN博客_ubuntu安装搜狗输入法后不能切换搜狗输入法 for linux 安装指南(搜狗输入法安装在Ubuntu虚拟机中的方法)_人生如路兮的博客-CSDN博客
下载x86_64版本的,不然软件中心安装不上!
成功:解决Ubuntu18.04搜狗输入法无法使用的问题_ourjaycn的博客-CSDN博客_ubuntu安装搜狗输入法后不能切换
建立txt文档模板
ubuntu20系统右键里面没有创建文本文件_舒泽的博客-CSDN博客_ubuntu右键没有新建文档
ROS安装
ubuntu 18.04 三五分钟即可一键安装ROS系统(亲测有效)_用券买土豆的博客-CSDN博客_ubuntu18.04安装ros
按上面教程装:
使用小鱼的一键安装
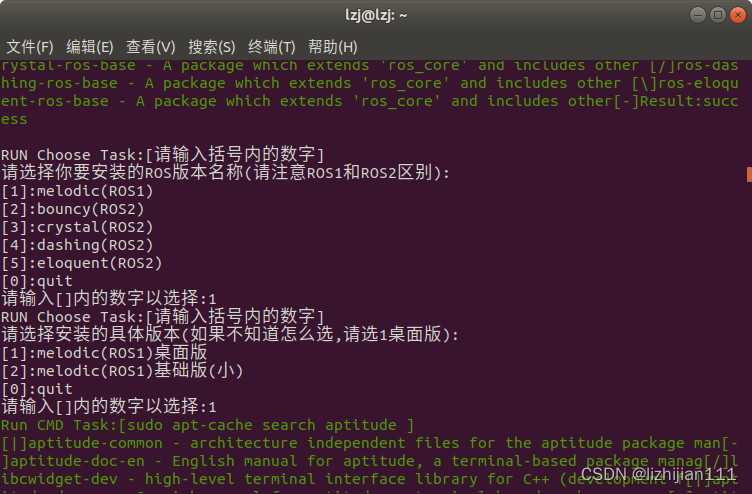
wget http://fishros.com/install -O fishros && . fishros出现下面选项--选 1
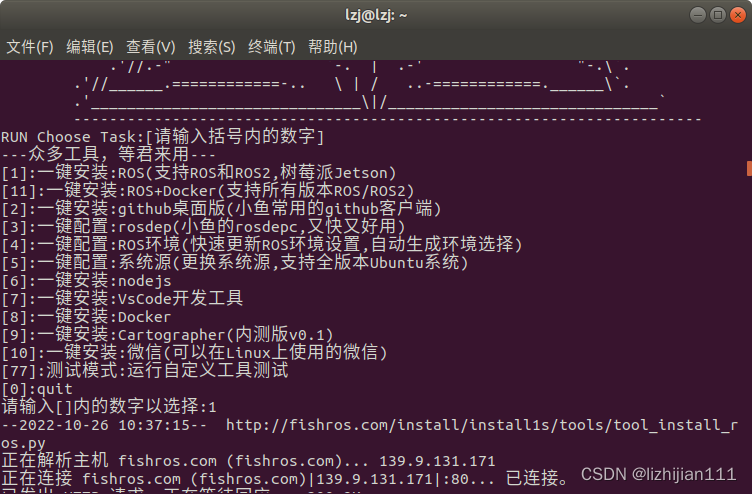
因为我之前换过阿里源,这里选2,但是貌似他还是给我用来清华源!建议选1
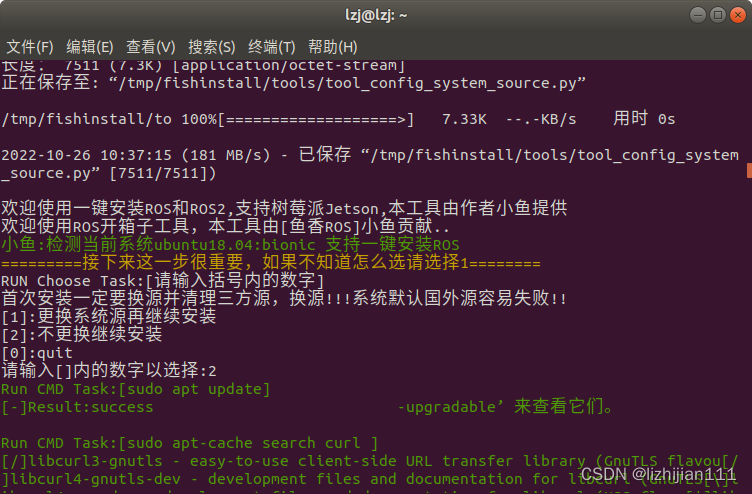
我是ubuntu18.04,选择melodic,后面选择桌面版
不知道为什么,我刷新了很久的镜像源(半小时?),人麻了!

装完之后,再执行上面小鱼的命令,选择3,更新rosdep,然后根据提示执行 rosdepc update


不确定小鱼的安装有没有把路径加入环境变量,自己手动加一次:
echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
source ~/.bashrc
#查看
sudo gedit /.bashrc
检查验证:
打开一个终端输入:roscore,出现下图成功!
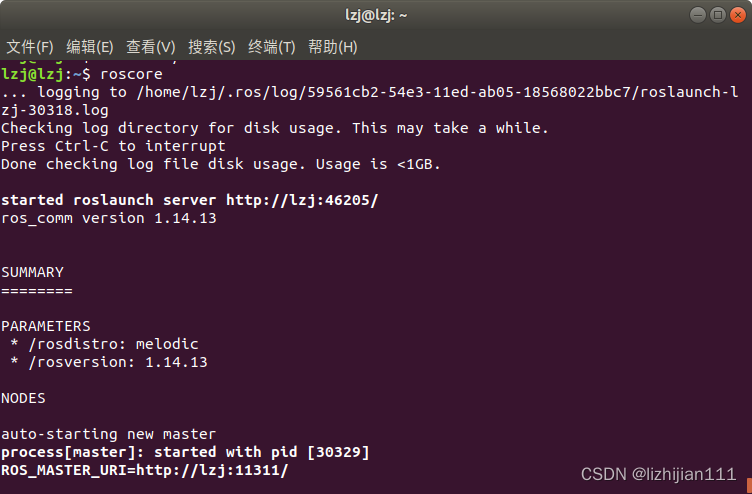
然后再打开一个终端输入:rosrun turtlesim turtlesim_node ,出现小乌龟!
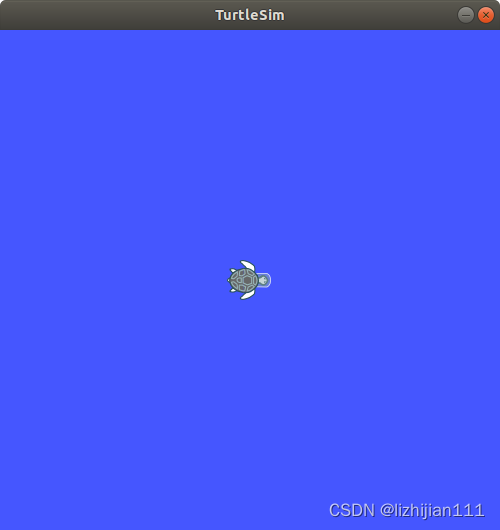
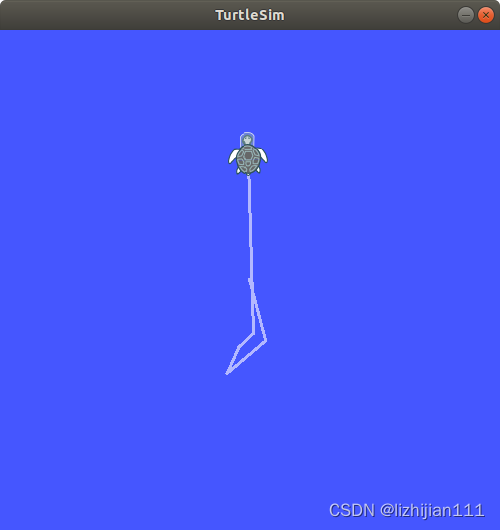
再打开一个终端输入:rosrun turtlesim turtle_teleop_key 可以通过上下左右键移动小乌龟!
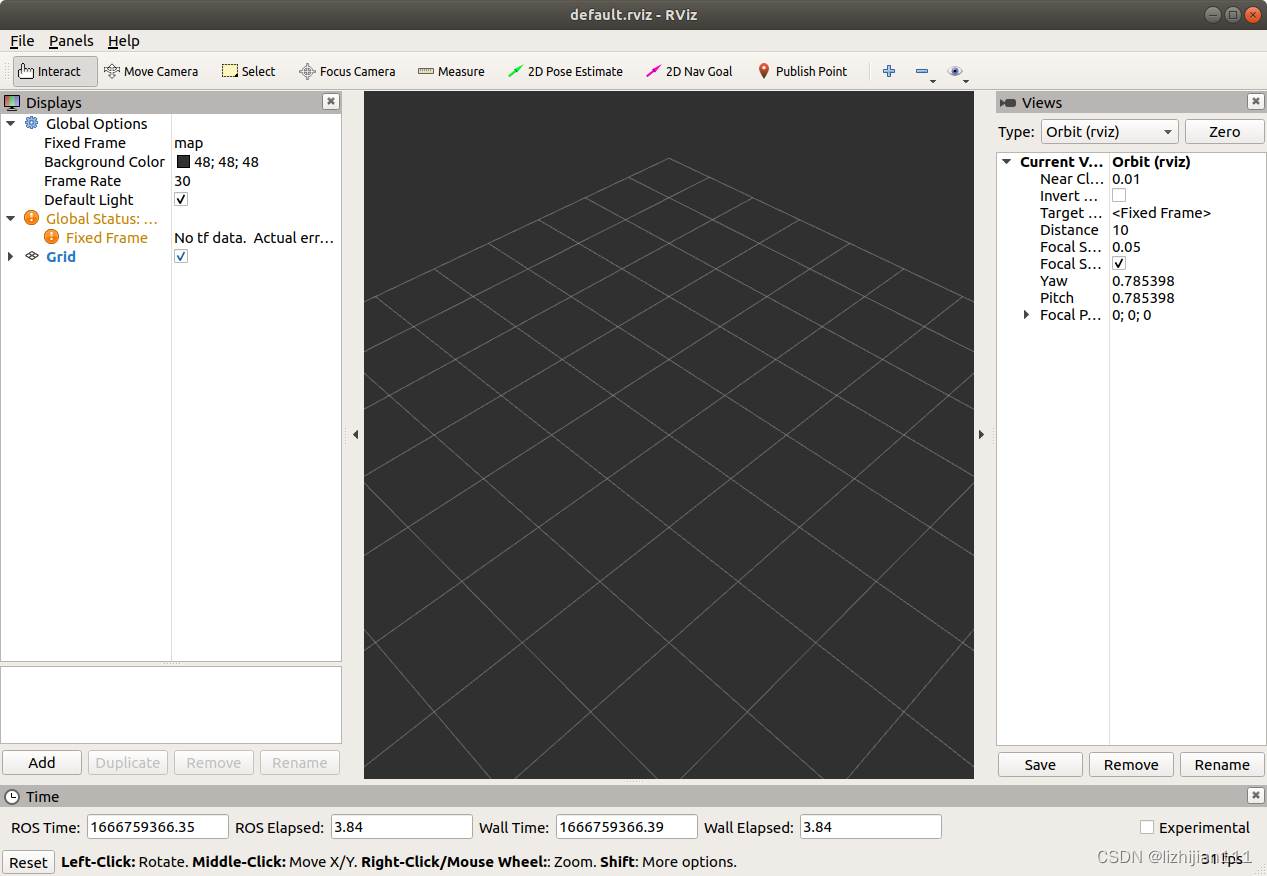
最后,验证rosrun rviz rviz,打开第一个终端输入roscore 打开第二个终端输入rosrun rviz rviz 看到下图画面则rviz等其他组件安装成功
参考:
Ubuntu18.04安装Ros(最新最详细亲测)_向日葵骑士Faraday的博客-CSDN博客_ubuntu18.04安装ros
鱼香ROS网站上线|一行代码安装ROS/ROS2/解决rosdep问题|小鱼脚本_鱼香ROS的博客-CSDN博客_鱼香ros网站















 3367
3367

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









