







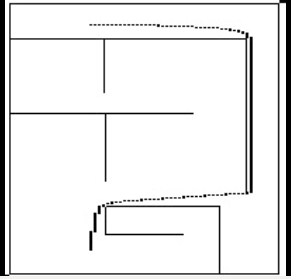
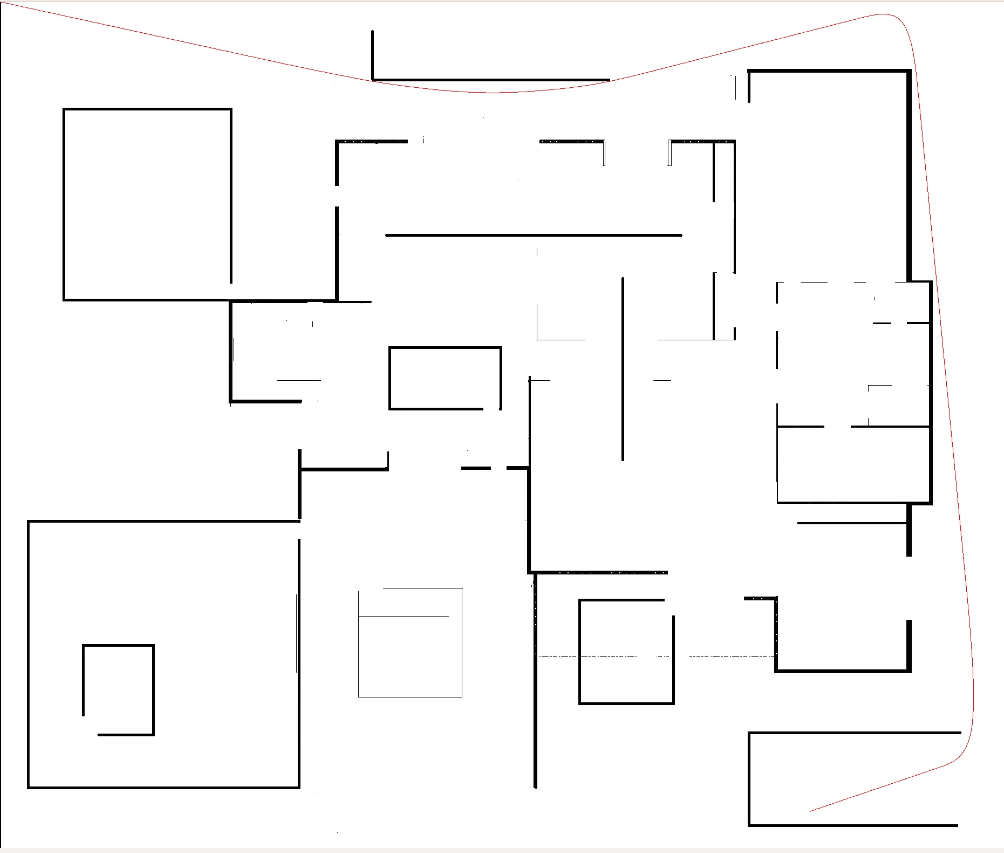
基于图片像素的测试
Geomtest.cpp
#include <sstream>
#include <ompl/base/spaces/RealVectorStateSpace.h>
#include <ompl/geometric/SimpleSetup.h>
#include <ompl/geometric/planners/rrt/RRT.h>
#include <ompl/geometric/planners/rrt/RRTstar.h>
#include <ompl/geometric/planners/rrt/RRTConnect.h>
#include <ompl/util/PPM.h>
#include <string>
#include <ompl/config.h>
#include <opencv2/opencv.hpp>
#include<opencv2/core/core.hpp>
#include <boost/filesystem.hpp>
#include <iostream>
#include <functional>
#include "boost/bind.hpp"
using namespace std ;
using namespace boost;
namespace ob = ompl::base;
namespace og = ompl::geometric;
using namespace cv;
Mat img ;
class Plane2DEnvironment
{
public:
Plane2DEnvironment()
{
img= imread("/home/ljq/ompl_tutorial/OMPL_Sample/Geomtest/floor.ppm",CV_LOAD_IMAGE_UNCHANGED);
bool ok = true;
if (ok)
{
ob::RealVectorStateSpace *space = new ob::RealVectorStateSpace();
space->addDimension(0.0, img.cols);
space->addDimension(0.0, img.rows);
maxWidth_ = img.cols - 1;
maxHeight_ = img.rows - 1;
ss_.reset(new og::SimpleSetup(ob::StateSpacePtr(space)));
ss_->setStateValidityChecker(boost::bind(&Plane2DEnvironment::isStateValid, this, _1));
space->setup();
ss_->getSpaceInformation()->setStateValidityCheckingResolution(1.0 / space->getMaximumExtent());
ss_->setPlanner(ob::PlannerPtr(new og::RRTConnect(ss_->getSpaceInformation())));
}
}
bool plan(unsigned int start_row, unsigned int start_col, unsigned int goal_row, unsigned int goal_col)
{
if (!ss_)
return false;
ob::ScopedState<> start(ss_->getStateSpace());
start[0] = start_row;
start[1] = start_col;
ob::ScopedState<> goal(ss_->getStateSpace());
goal[0] = goal_row;
goal[1] = goal_col;
ss_->setStartAndGoalStates(start, goal);
{
if (ss_->getPlanner())
ss_->getPlanner()->clear();
ss_->solve();}
const std::size_t ns = ss_->getProblemDefinition()->getSolutionCount();
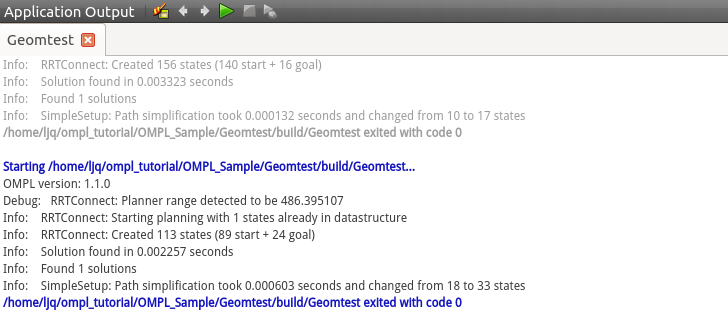
OMPL_INFORM("Found %d solutions", (int)ns);
if (ss_->haveSolutionPath())
{
ss_->simplifySolution();
og::PathGeometric &p = ss_->getSolutionPath();
ss_->getPathSimplifier()->simplifyMax(p);
ss_->getPathSimplifier()->smoothBSpline(p);
return true;
}
return false;
}
void recordSolution()
{
if (!ss_ || !ss_->haveSolutionPath())
return;
og::PathGeometric &p = ss_->getSolutionPath();
p.interpolate();
for (std::size_t i = 0 ; i < p.getStateCount() ; ++i)
{
const int w = std::min(maxWidth_, (int)p.getState(i)->as<ob::RealVectorStateSpace::StateType>()->values[0]);
const int h = std::min(maxHeight_, (int)p.getState(i)->as<ob::RealVectorStateSpace::StateType>()->values[1]);
img.at<Vec3b>(h,w)[2] = 255;
img.at<Vec3b>(h,w)[1]=0;
img.at<Vec3b>(h,w)[0]=0;
}
}
private:
bool isStateValid(const ob::State *state) const
{
const int w = std::min((int)state->as<ob::RealVectorStateSpace::StateType>()->values[0], maxWidth_);
const int h = std::min((int)state->as<ob::RealVectorStateSpace::StateType>()->values[1], maxHeight_);
return img.at<Vec3b>(h, w)[2] >=200 && img.at<Vec3b>(h, w)[1] >=200 && img.at<Vec3b>(h, w)[0] >=200 ;
}
og::SimpleSetupPtr ss_;
int maxWidth_;
int maxHeight_;
};
int main(int argc,char **argv)
{
std::cout << "OMPL version: " << OMPL_VERSION << std::endl;
Plane2DEnvironment env ;
if (env.plan(0, 0, 1500,1500))
{
env.recordSolution();
imwrite("/home/ljq/ompl_tutorial/OMPL_Sample/Geomtest/res2.jpg",img);
}
return 0;
}
cmakelist.txt
cmake_minimum_required(VERSION 2.8.3)
project(Geomtest)
find_package(OMPL REQUIRED)
find_package(Boost 1.54.0 REQUIRED COMPONENTS system filesystem)
include_directories(${Boost_INCLUDE_DIRS})
link_directories( ${Boost_LIBRARY_DIRS})
include_directories(${OMPL_INCLUDE_DIRS})
find_package(OpenCV REQUIRED)
include_directories(${OpenCV_INCLUDE_DIRS})
ADD_DEFINITIONS(
-Wall
-g
-O2
-std=c++11
)
include_directories(${OMPL_INCLUDE_DIRS} )
link_directories(${OMPL_LIBRARY_DIRS})
add_definitions(${OMPL_DEFINITIONS})
add_executable (Geomtest Geomtest.cpp)
target_link_libraries (Geomtest ${OMPL_LIBRARIES}
${Boost_LIBRARIES}
${OpenCV_LIBS})















 2727
2727











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









