







源自:系统工程与电子技术
作者:周剑雄 朱永锋 陈冀 吴宏铭 吴堃 张永杰
“人工智能技术与咨询” 发布
摘 要
高分辨距离像在轻小型雷达平台探测识别目标中有重要应用, 准确的目标和环境先验信息是提高距离像检测识别性能的关键因素。本文提出以离线或在线合成孔径雷达(synthetic aperture radar, SAR)图像作为先验信息来源, 提取目标二维散射中心并向距离像视线方向投影获得一维散射中心特征模板, 在此基础上设计了距离像检测、识别以及要害部位选择算法流程, 采用电磁计算和外场实测地面目标数据进行了试验验证。结果表明: SAR图像辅助的距离像检测识别算法不仅具有较高的检测和识别率, 在姿态、频段、分辨力等观测条件变化的情况下也具有较高的稳定性, 具有较好的实用价值。
关键词
距离像, 目标检测, 目标识别, 合成孔径雷达图像
引 言
雷达发射宽带信号获得目标的强散射源在雷达视线方向的投影分布, 也称为目标的高分辨距离像(high range resolution profile, HRRP)。对于舰船、飞机、车辆等良导体目标, 强散射源的位置分布和散射强度与目标的形状结构有关, 为雷达传感器检测和识别目标提供了依据[1-2]。距离像的形成不依赖于目标与雷达的相对运动, 广泛适用于各种雷达观测几何。例如在精确打击应用中, 雷达平台朝向目标飞行, 不能形成方位孔径, 只能获得目标的距离像; 又如在高机动平台或高机动目标的场景中, 目标与雷达的相对运动关系复杂, 距离成像不需要长时间的积累和复杂的运动补偿, 大大提高了成像帧率。HRRP具有容易获取、实时性高、适用性广的特点, 是雷达传感器获取目标特征信息的重要手段。
目标的强散射源在三维空间中分布, 而距离像反映的只是它们在雷达视线方向的一维投影, 投影引起的信息丢失使得距离像的可解译性低于二维雷达图像。另外, 位于同一距离单元内的散射源在距离像中相干叠加, 参与相干合成的散射源数量受到分辨单元划分的影响, 它们的相位关系敏感于姿态的微小变化, 这些因素使得距离像有较强的姿态敏感性、平移敏感性以及分辨力敏感性。基于距离像的检测和识别在先验信息的获取和表达、稳健特征的提取以及检测/分类性能提升等各个方面, 都比基于合成孔径雷达(synthetic aperture radar, SAR)图像的检测和识别更为困难。
在距离像检测方面, 虽然早在1983年, Hughes就证明了利用目标距离像先验信息可以大大提高检测性能, 进而提出了“匹配发射”的概念[3], 但由于距离像的敏感性强, 难以获得可靠的模板, 工程中实际使用的检测方法仍是不依赖先验信息的能量检测器或双门限检测器[4-5]。在距离像识别方面, 大量研究采用了全姿态的距离像模板库作为训练数据, 通过训练神经网络、支持矢量机等高维的分类器实现各个姿态下的距离像识别, 并在训练数据分布的整个姿态范围内统计分类性能[1-2, 6]。统计分类器具有较高的平均识别率, 但在特定目标姿态下识别性能可能并不理想。另外, 研究中采用的训练样本与待识别样本通常都是同源样本, 即目标状态、环境背景、雷达频段与分辨力等参数在训练与测试数据中完全一致, 而在实际应用中, 工作条件往往会发生变化, 性能难以保证。
课题组针对距离像检测识别中先验信息的获取和利用这一关键问题开展了长期研究, 提出将离线或在线的SAR图像作为先验信息来源, 通过散射中心特征提取和投影变换, 形成距离像检测识别可用的先验信息, 设计了相应的距离像检测识别方法, 并进一步利用散射中心模型中含有的目标结构信息实现了基于距离像的目标要害部位选择。本文介绍了SAR图像辅助的距离像检测、识别以及要害部位选择方法, 对频段、分辨力和姿态适应性进行了讨论, 采用电磁计算数据和外场实测数据验证了方法的有效性, 为宽带雷达目标检测识别提供了新的途径。
1 一维散射中心特征建模
获取目标在特定工作条件下的距离像先验信息, 是提高距离像检测识别性能的关键。但由于距离像敏感于目标形状材质、部件配置、姿态以及环境背景等条件, 难以获取准确的距离像模板。SAR图像可以通过侦查手段获得, 它反映了目标的强散射源在成像面的投影分布, 是比几何模型更可靠的散射特性先验模型。对于精确制导等应用, 可以在飞行中段通过特殊的航路设计获得目标的SAR图像[7], 这种在线获取的先验模型在目标状态、环境条件等方面保真度高, 可以为末段基于距离像的检测识别提供可靠的目标信息。要利用这样的先验信息, 首先要解决的问题是: 如何基于SAR图像生成可用于距离像检测识别的先验模板。
对SAR复图像沿方位向进行逆傅里叶变换, 可以获得目标在成像孔径内的距离像序列。但该方法存在两个问题: 一是需要保留SAR图像的相位信息, 并且方位成像的参考点应为目标中心, 对SAR成像算法要求较高; 二是距离像中同距离单元的散射点已经相干合成, 只能反映与SAR成像同频段同分辨力同姿态下的距离像特性, 适用范围受限。为此, 本文提出以稳定性较高的散射中心特征作为SAR图像与距离像转换的桥梁, 提高SAR图像先验信息的适用性。
根据电磁散射的局部性原理, 当雷达波长远小于目标尺寸时, 目标的电磁散射可以认为主要来源于目标上局部的强散射源, 如目标几何结构形成的镜面、边缘、尖端等, 这些局部的散射源也称为散射中心[8-9]。由散射中心的形成机理可知, 散射中心的位置分布主要由目标的形状结构决定, 在电磁散射的光学区具有较好的普适性; 对于边缘、尖端等散射结构, 在较大的姿态范围内都能形成较强的后向散射, 姿态敏感性较低。散射中心模型对目标的众多散射源进行了分解, 避免了相干合成引起的幅度变化, 具有较高的姿态、频率稳定性。已有研究结果表明, 基于目标的三维散射中心模型, 可以以较高的保真度恢复不同频段、不同分辨力、不同姿态下的雷达图像[10]。
SAR图像和距离像中的众多局部极值点都是由散射中心在成像面/线上的投影引起。SAR图像反映了三维散射中心在成像面上的投影, 不同散射中心投影重叠的概率较低, 图像与目标形状结构的对应关系较明显。从SAR图像中提取目标的二维散射中心特征, 并根据SAR成像与距离成像的视角变化关系, 将它向距离成像的雷达视线方向投影, 可以获得较为稳定的距离像先验信息, 并进一步生成检测识别所需的距离像模板。
基于SAR图像生成一维散射中心特征模型的流程如图 1所示。
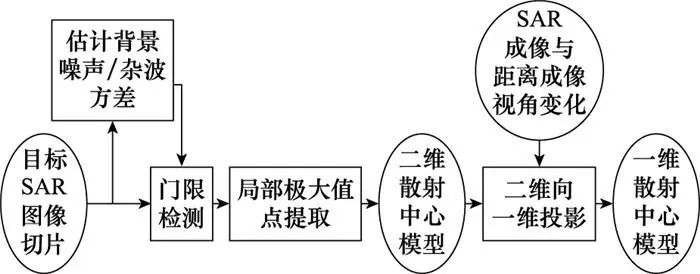
图1 基于SAR图像生成一维散射中心特征模型
将提取的二维散射中心模型记为集合
![]()
(1)
式中: K为提取的二维散射中心数目; (xk, yk)为第k个散射中心在SAR图像中的位置; Ak为该散射中心在SAR图像中的幅度, 以上特征可以仅从SAR幅度图像中提取。
设距离成像相对于SAR成像视角改变量为θ, 即距离成像的雷达视线方向在SAR成像坐标系中的角度为θ, 如图 2所示, 则由二维散射中心投影得到的一维散射中心模型为
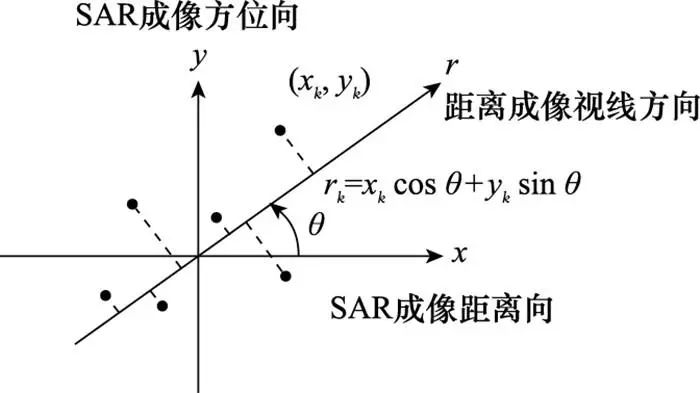
图2 二维散射中心与一维散射中心投影关系
![]()
(2)
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1019
1019

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









