







目录
1.定义
FOC(Field Oriented Control)磁场定向控制又称矢量控制,其方法是通过坐标变换将三相交流电的控制转换为产生转矩的q轴电流和产生磁场的d轴电流的控制,实现转矩和励磁的独立控制。
2.Main concepts
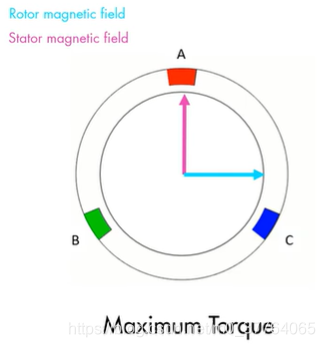
把磁场用空间矢量的形式表示,已知当定子磁场方向和转子磁场方向垂直的时候可以产生最大的力矩,因此始终保证定子磁场方向和转子磁场方向垂直就可以保证电机获得良好的performance。
FOC算法的思想为:
- 首先测量得到转子的位置(angular position),这样就能知道转子磁场的方向,也就是蓝色矢量
- 根据转子位置可以计算出期望的定子磁场矢量,也就是和蓝色矢量垂直的桃红色矢量
- 最后可以通过控制三相电流合成期望的定子磁场矢量
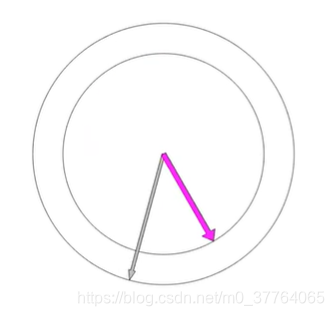
以图解为例,灰色矢量和转子磁场矢量方向相同,即为我们的参考矢量,桃红色矢量为定子磁场方向,现在两者相差45°,我们希望桃红色矢量能比灰色矢量超前90°,也就是两者正交。
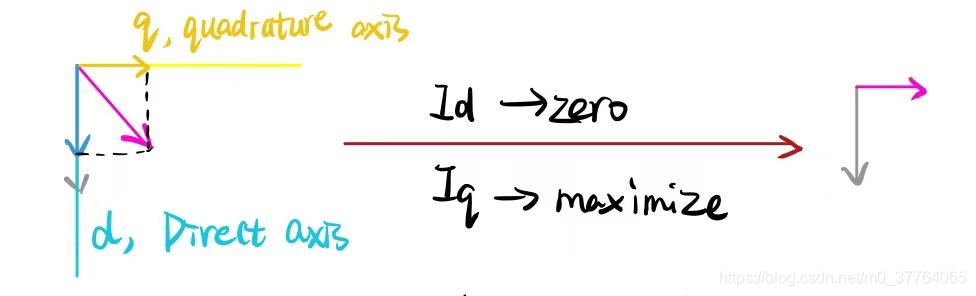
解决办法是:
把定子磁场矢量分解为两个正交矢量,一个沿着参考矢量的方向叫做直轴(Direct axis)用d表示,一个垂直于参考矢量的叫交轴(Quadrature axis)用q表示,当我们控制直轴的电流到0,交轴的电流最大时,就能实现合成的桃红色矢量垂直于参考矢量,实现了控制目标。
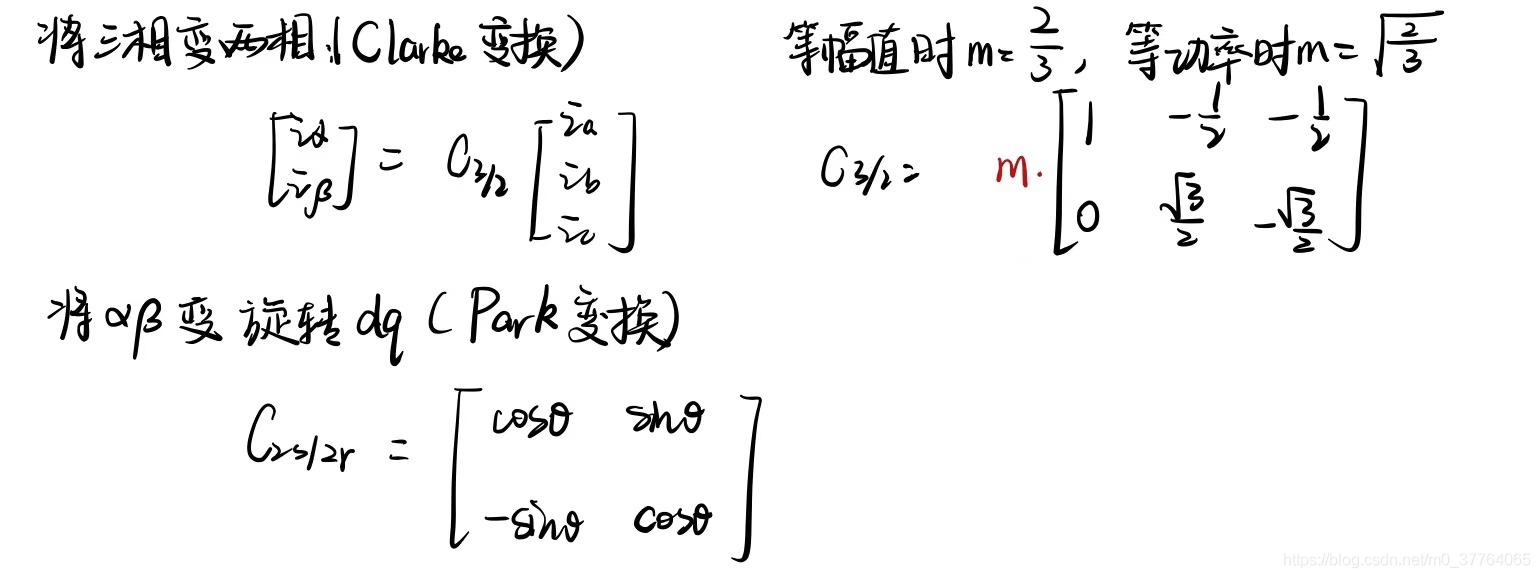
从a,b,c三相电流到d,q轴电流的变换称为Clarke-Park变换
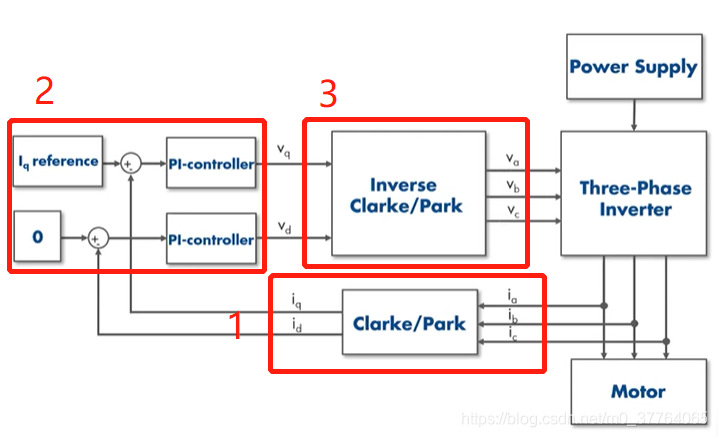
3.Control structures
- 首先测量三相电流
 ,然后进行
,然后进行 变换,将三相电流变换成旋转的交直轴电流
变换,将三相电流变换成旋转的交直轴电流
- 然后将测量所得的与设定值
 比较,作差后分别输入PI控制器,输出对应电压
比较,作差后分别输入PI控制器,输出对应电压
- 再将经过逆变换将旋转的变换成三相电压
 输入逆变器·
输入逆变器·
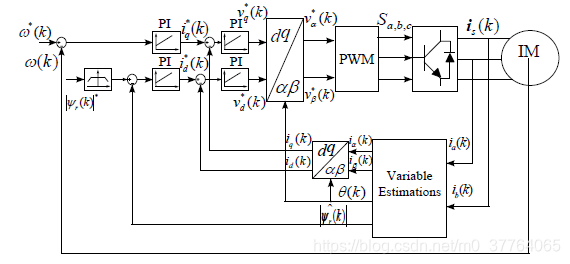
更全的控制结构应该是这种,根据电机速度环PI算出需要的转矩电流 ,根据磁链算出需要的励磁电流
,根据磁链算出需要的励磁电流 ,然后再进行电流环PI。
,然后再进行电流环PI。

















 833
833

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









