







PMSM学习笔记
目前大部分模型参考自适应无速度算法都是基于定子电流模型,这里介绍一下基于磁链模型的模型参考自适应无速度算法,其实基于两种模型的算法没有什么本质区别,就当多一些了解吧,仍然是基于SPMSM,Ld=Lq,改用在IPMSM也是同样原理。
一、原理介绍
SPMSM在同步旋转坐标系的定子电压数学模型为

同步旋转坐标系下的永磁同步电机定子磁链方程为

因此,同步旋转坐标系的定子电压数学模型可以写为

定义

由式(1.4)代入(1.3)得到参考模型的状态空间表达式:

将式(1.5)电机转速、定子磁链用估计值表示,得到定子磁链可调模型:

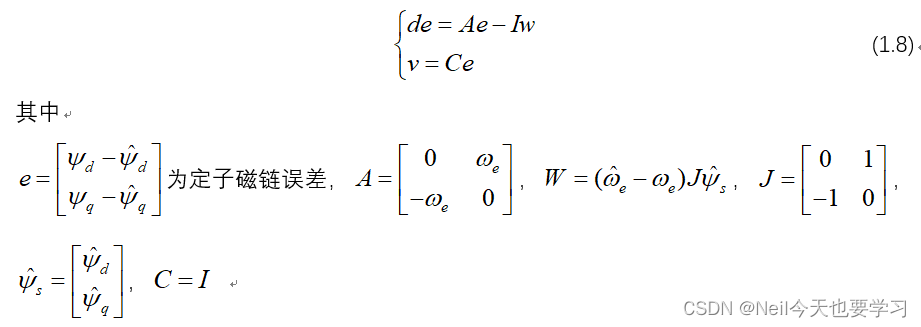
将式(1.5)减去式(1.6),电机实际值与观测估算值之间的误差状态方程:

为证明系统稳定性,将式(1.7)分为线性时不变和非线性时变反馈系统。证明线性时不变的稳定性,及选取合适的自适应律,并证明非线性时变的稳定性
根据Popov理论证明稳定性(详细推导略),对Popov不等式进行逆向求解可以得到转速自适应律:
![]()
转子的估算位置角是对转速的积分,即:

二、仿真验证
1.固定参数下的仿真
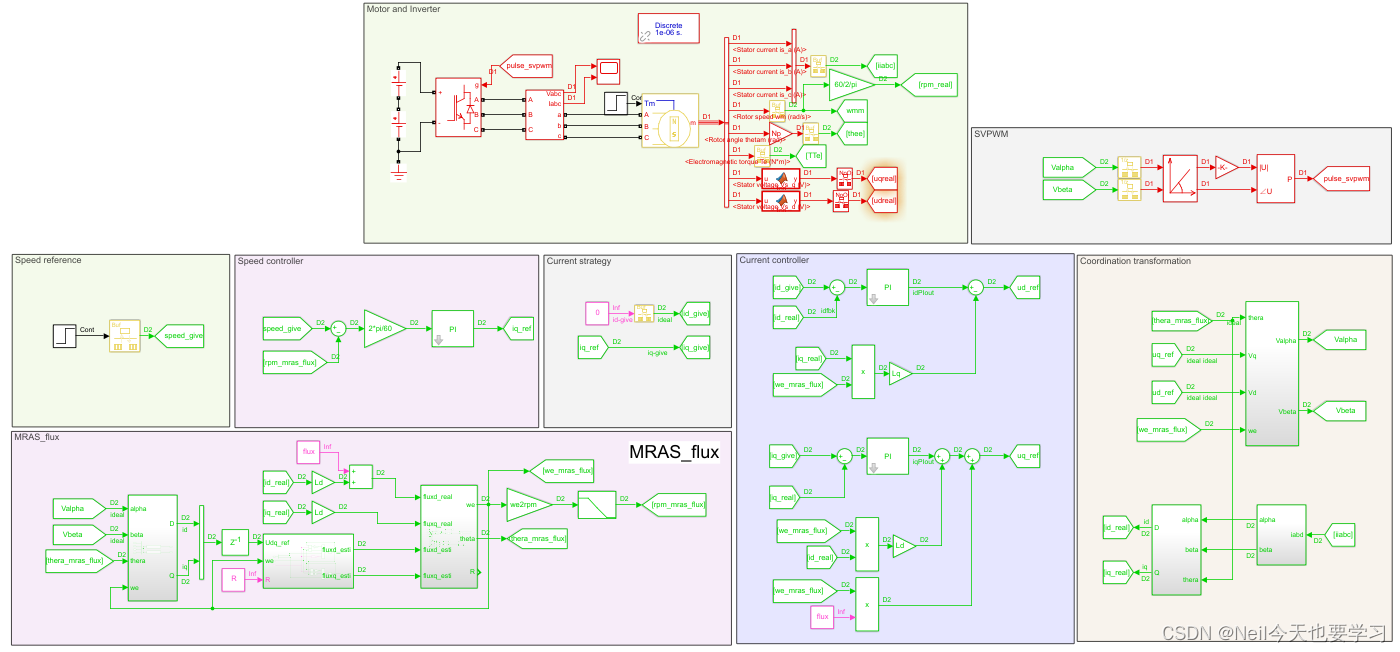
在MATLAB/simulink里面验证所提算法,采用和实验中一致的控制周期1e-4,电机部分计算周期为1e-6。仿真模型如下所示:
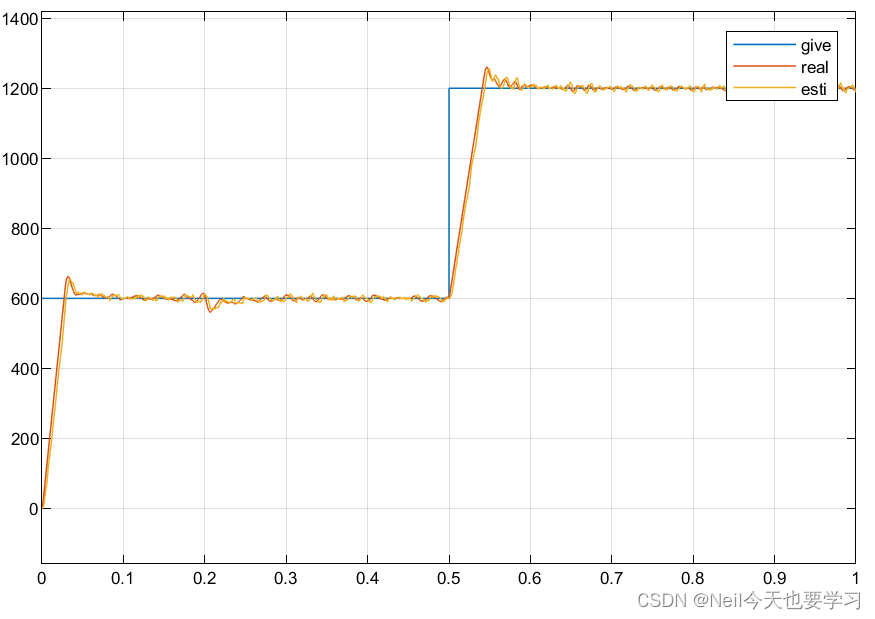
仿真条件:初始给定转速600rpm,带半载启动,0.2s时负载增加至满载,0.5s时给定转速阶跃到1200rpm
下图为给定转速、实际转速和估计转速,可以看出跟踪效果还是可以的,稳态时转速误差不超过20rpm;施加阶跃负载时,转速跌落也比较小。
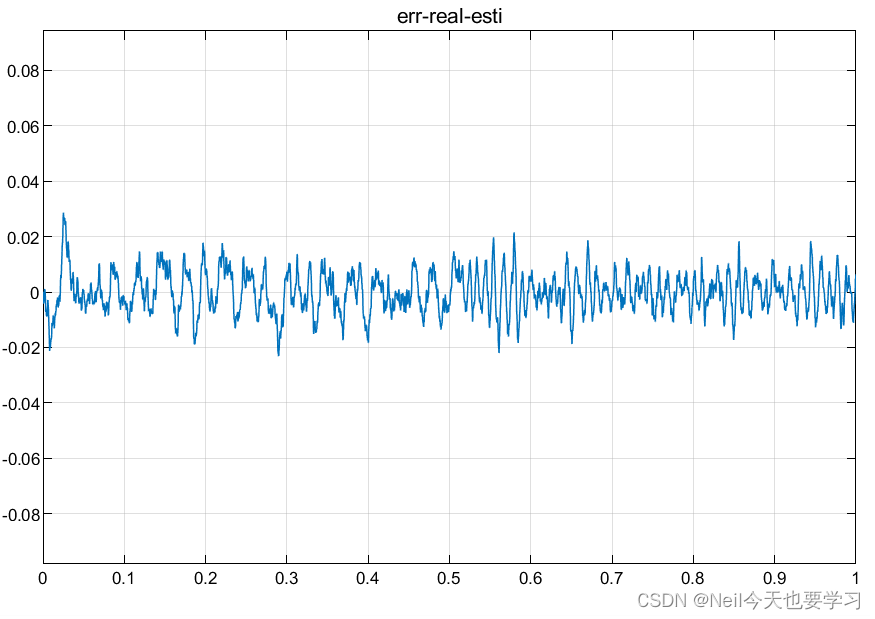
下图为转子位置估计误差(实际转子位置减去估计转子位置),在±0.02rad之间,转换成度数就是在±1.15°之间,还是比较好的
2.变化参数下的仿真
与永磁同步电机无速度算法--同时辨识转速和电阻的模型参考自适应-CSDN博客类似,增加电阻辨识算法,原理推导不再赘述。设置电机实际电阻为控制器中电阻值3倍,模拟随着运行温度升高导致电阻阻值增加。对比有无电阻辨识算法的MRAS控制性能。
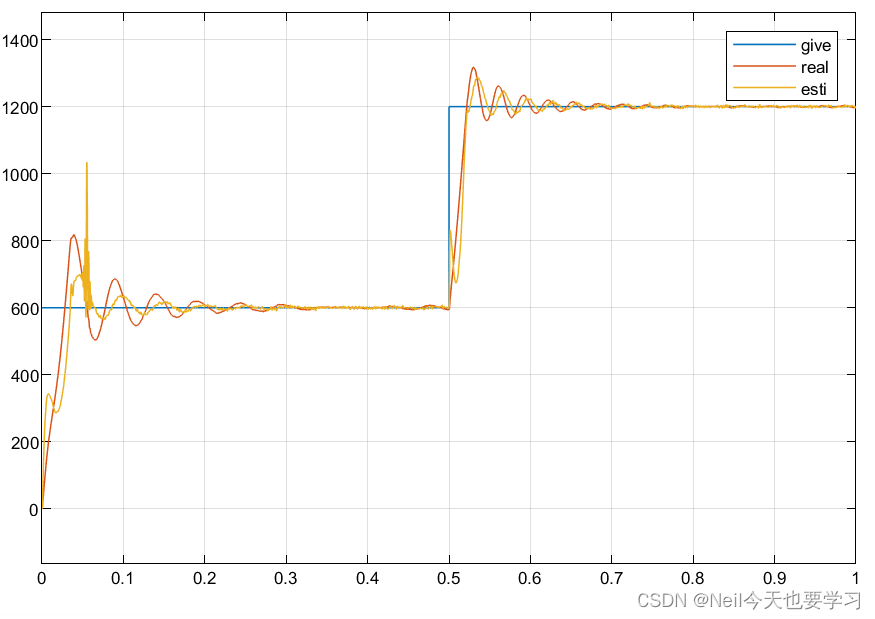
2.1空载启动
给定转速、实际转速和估计转速(左图:无电阻辨识算法;右图:增加电阻辨识算法)

2.2带载启动
给定转速、实际转速和估计转速(左图:无电阻辨识算法;右图:增加电阻辨识算法)
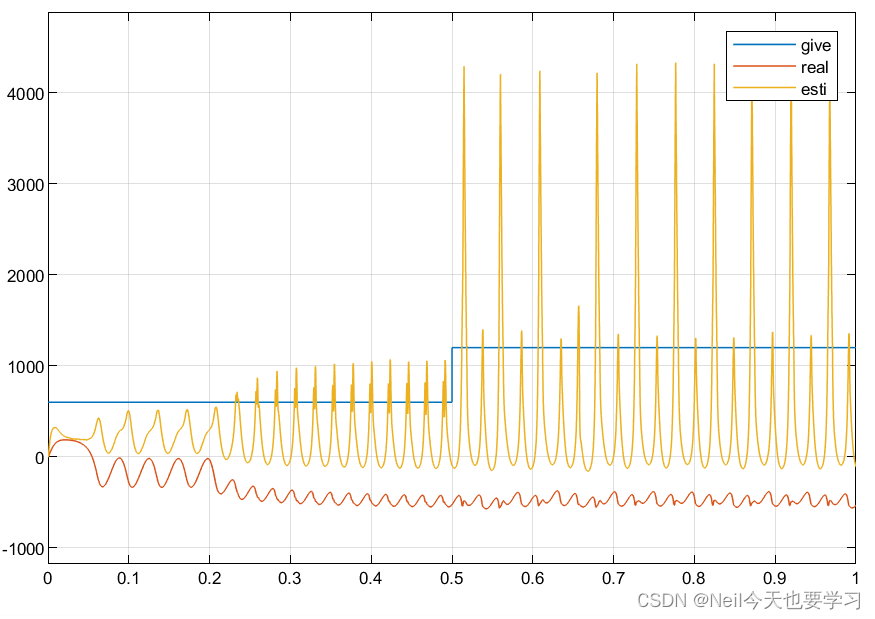
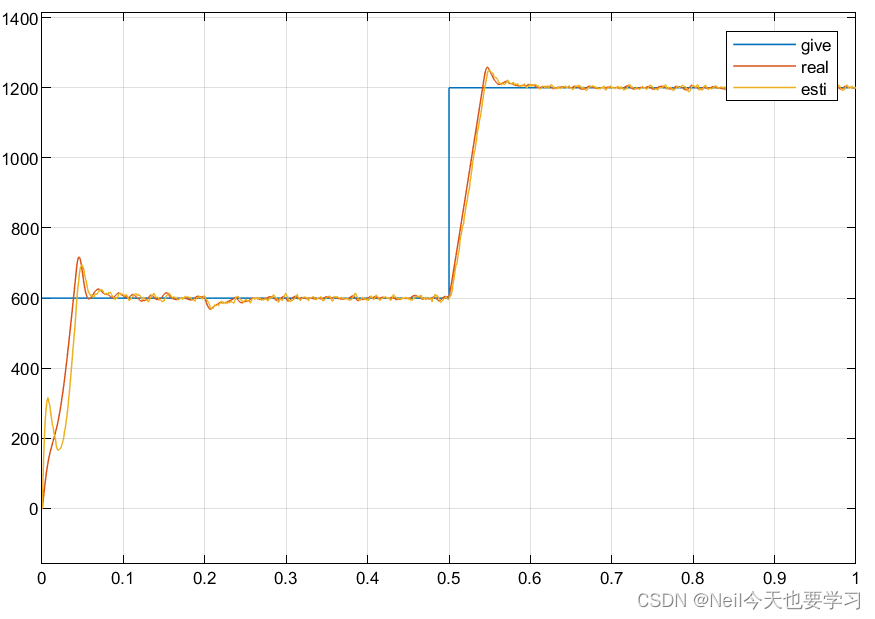
综上,可以看出增加电阻辨识算法后,对于控制稳定性的增加和估计误差的减小的效果还是很明显的。















 1606
1606

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









