







本篇对另外一种无速度传感器控制策略做详解——模型参考自适应MRAS无速度控制策略。
1 MRAS简介
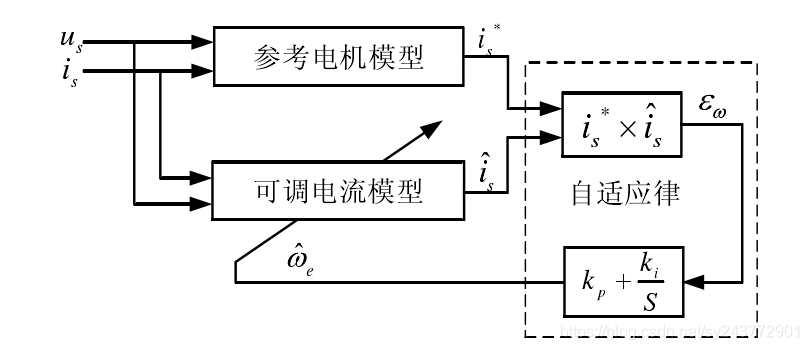
MRAS的主要思想:构建两个具有相同物理意义的输出量的模型,其中以不含有位置参数的电机方程作为参考模型,而将待估计参数的方程作为可调模型。利用两个模型输出量差值构建适当的自适应律来实时调节可调模型的参数,使得可调模型的输出跟踪参考模型的输出。MRAS结构图如图所示:
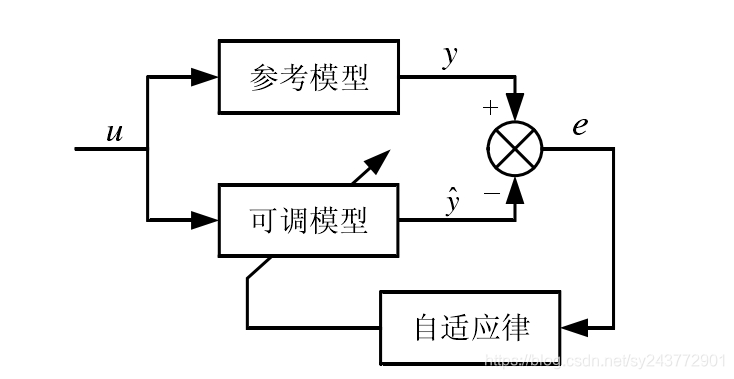
在MRAS转速估计中,系统和转速的渐近收敛由Popov超稳定理论来保证。对Popov积分不等式逆向求解即可得到由PI调节器控制的转速估算公式。
2 基于MRAS的PMSM参考模型和可调模型的建立
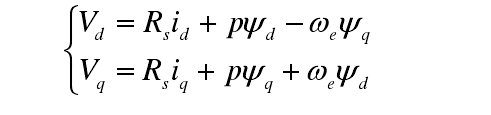
首先看看PMSM在dq轴坐标系下的数学模型,定子电压方程如下,其中p为微分算子。
定子磁链方程如下:

若将其转换为电流模型,即将定子磁链方程带入到定子电压方程中即可得到以定子电流作为状态变量的电流模型,如下所示:
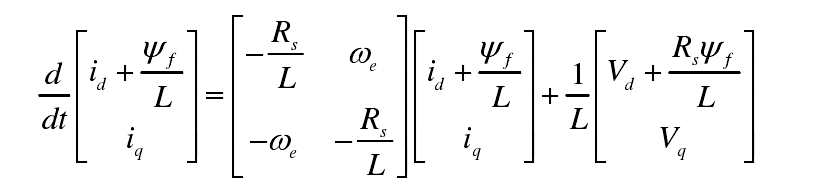
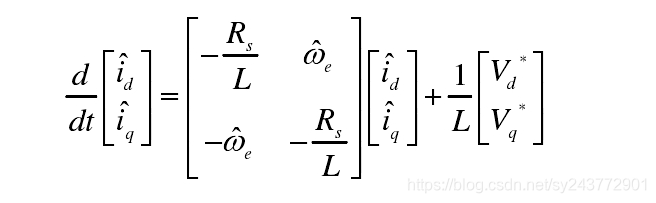
令 id'= id + phif/L ,,iq' = iq ,Vd' = Vd + Rs*phif/L,Vq' = Vq,
则可以将参考电机模型写为:
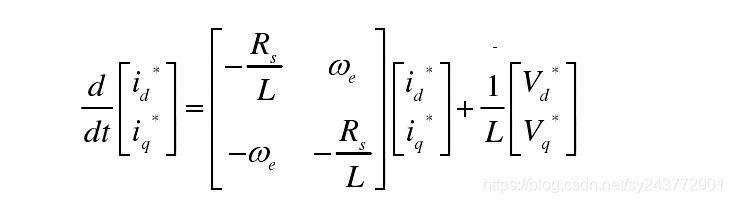
将可调模型写为:
3、转速估计的原理
在设计完参考电机模型和可调模型之后,可以结合文章开头所述,利用两个模型输出量的差值构建适当的自适应律来实时调节可调模型参数,使得可调模型输出跟踪参考模型的输出。那么两个模型的输出是什么呢?是电流。调节可调模型的什么参数呢?转速。经过处理的电流差值(后面介绍这里为什么是经过处理的电流差值)经过估算PI调节器后可以得到估算转速we,这个we会驱使可调模型输出的id iq向参考模型的idiq逼近。从而使得可调模型收敛于可调模型,进而可以使得可调模型中的估算转速向实际转速逼近,进而实现转速的估计。

















 1658
1658

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









