







一、伺服电机的惯性
伺服电机的惯性主要指电机及其连接的负载的惯性。它是通过将物体的质量与其距离旋转轴的平方相乘得到的。对于伺服电机来说,惯性体现了电机和负载对速度和加速度变化的阻力程度,即其惯性越大,对速度和加速度变化的阻力越大。
惯性是物体抵抗速度变化的阻力。为了确定物体的惯性,物体的质量乘以它与旋转轴距离的平方。人们熟悉的惯性演示是在冰上玩花样滑冰。当她手臂靠近身体旋转时,她的质量接近旋转轴,她的旋转速度很快。但当她伸展手臂时,质量与旋转轴之间的距离会增加,使她的惯性变大,并使她以较慢的速度旋转。

二、惯性比
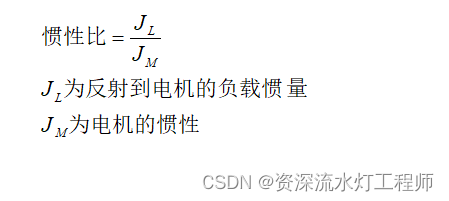
伺服电机的惯性比是负载转动惯量和电机转动惯量之比,具体来说,就是连在电机轴上的负载物体的转动惯量与电机自身转动惯量的比值。这个比值越大,就说明负载与电机转矩的匹配度越差,系统的响应速度和精度也会受到影响。这就相当于小马拉大车,钢不住啊。在伺服驱动器控制系统中,惯性比是一个重要的参数,它的大小对于系统的动态性能和稳定性有着至关重要的影响。在机电系统中,电机和负载都有惯性,负载惯量与电机惯量之比是伺服电机选型的重要方面之一。
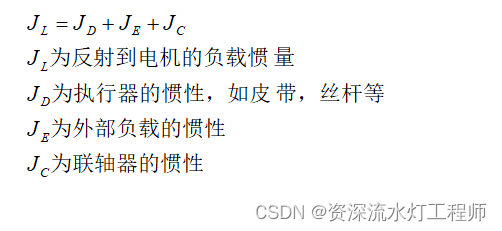
伺服电机惯量由制造商给出,而负载惯量是通过添加所有旋转部件的惯量来计算的,这些转动部件通常包括执行器、外部负载和联轴器等。
在伺服系统中,为了使电机在加减速过程中有效地控制负载,理论上要求电机和负载惯量应相等。如果不匹配,系统在加减速过程中会产生很大的扭矩波动,导致系统精度降低,甚至损坏设备。但是1:1的惯性匹配是很少见的。许多因素会影响系统的惯性比。
虽然没有确定最佳惯量比的公式,但一些电机应用指南规定惯量比应为10:1或更低。较高的失配会导致电机消耗比需要更多的电流,从而降低效率并增加运行成本。较高的惯量比也会增加共振,并可能导致系统超调所需的速度和位置,对性能产生负面影响。
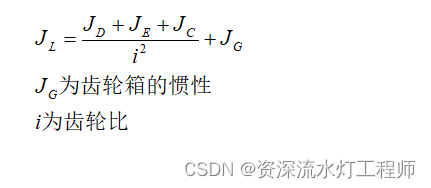
如果惯性比太高,有两种方法可以降低它:给系统增加一个齿轮箱,或者使用一个更大的电机。齿轮箱经常用于皮带传动系统,以优化电机转速和扭矩。但是,由于齿轮比对负载的惯性有平方反比的影响,它们也可以显著降低系统的惯性比。
降低惯性比的第二种方法是使用具有更大惯性的大电机。然而,从长远来看,这不是一个很好的解决方案,因为更大的电机意味着更高的成本,需要更多的扭矩来克服自身的惯性,消耗更多的能量,从而增加了系统的总拥有成本。
另一方面,不必要的低惯量比,甚至是“完美”的1:1匹配,都意味着使用更大的电机,导致不必要的成本和能耗。设计人员不应追求完美的惯性比,而应考虑到系统动力学和定位要求,并通过尺寸既不过大也不过小的伺服电机,努力实现满足这些要求的惯性匹配。















 1092
1092











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









