







 文章讲述了在JetsonTX2和OrinNX上利用RealsenseD435i与rtabmap进行SLAM的过程,提到rtabmap的安装、运行、地图存储以及可能遇到的内存限制。作者还探讨了rtabmap的特性,如无需T265的独立建图能力及地图格式输出。
文章讲述了在JetsonTX2和OrinNX上利用RealsenseD435i与rtabmap进行SLAM的过程,提到rtabmap的安装、运行、地图存储以及可能遇到的内存限制。作者还探讨了rtabmap的特性,如无需T265的独立建图能力及地图格式输出。
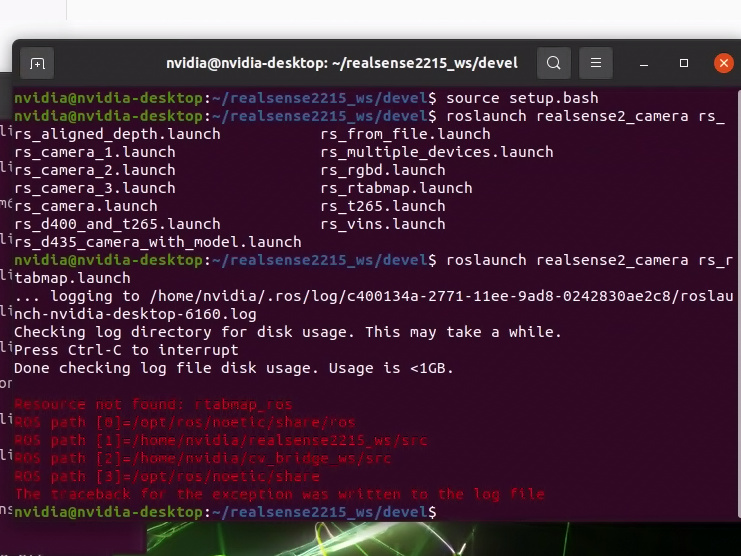
然后我二进制装了下 sudo apt-get install ros-noetic-rtabmap ros-noetic-rtabmap-ros
roslaunch realsense2_camera rs_rtabmap.launch 终端报红找不到t265
它这rtabmap需要配合T265一起!!!!!
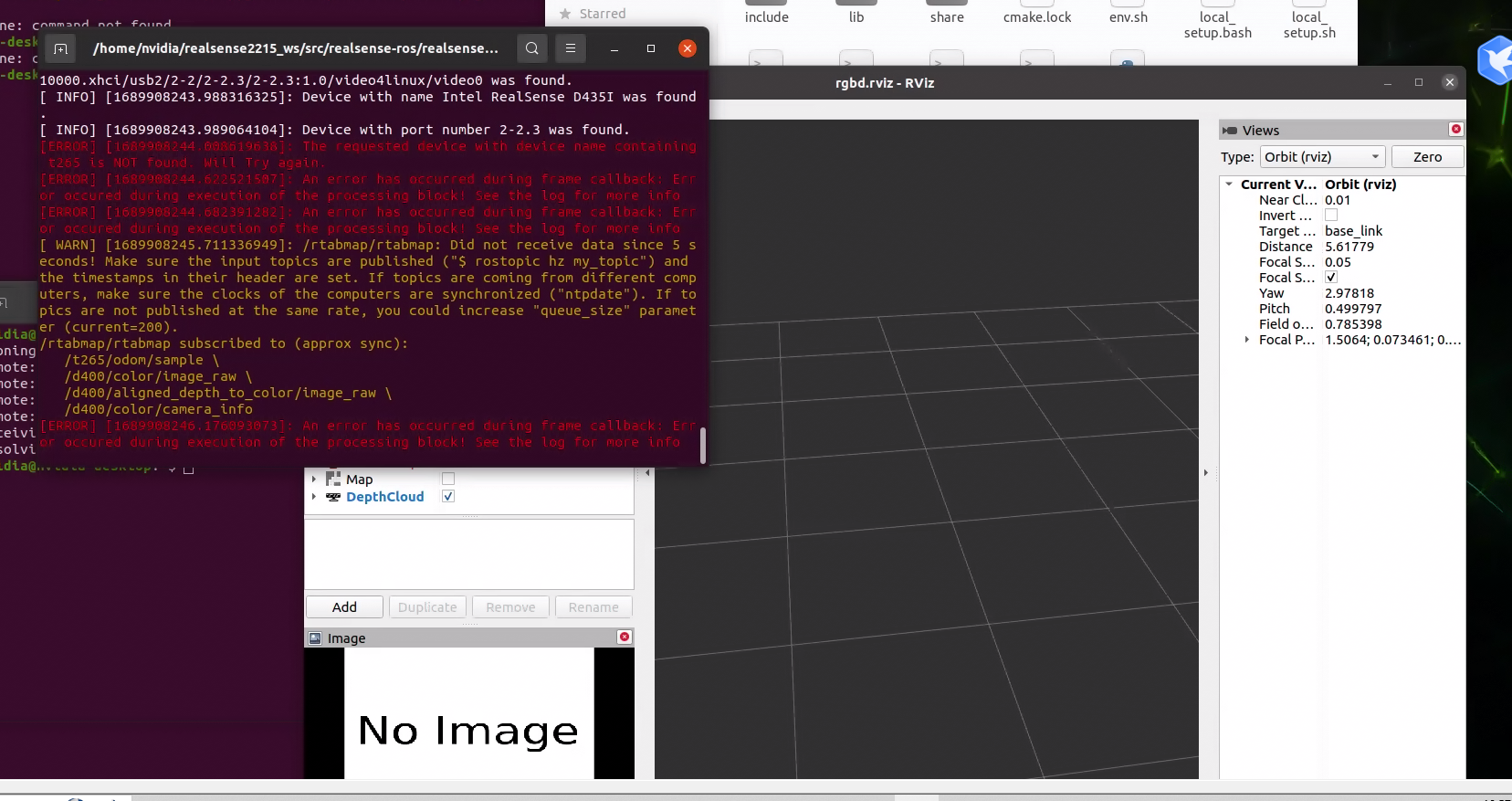
我拿这个单靠一个D435i跑成了 Jetson TX2在ROS下使用Realsense D435i跑rtabmap、octomap、VINS-Mono和ORB-SLAM2_librealsense slam-CSDN博客
roslaunch realsense2_camera opensource_tracking.launch
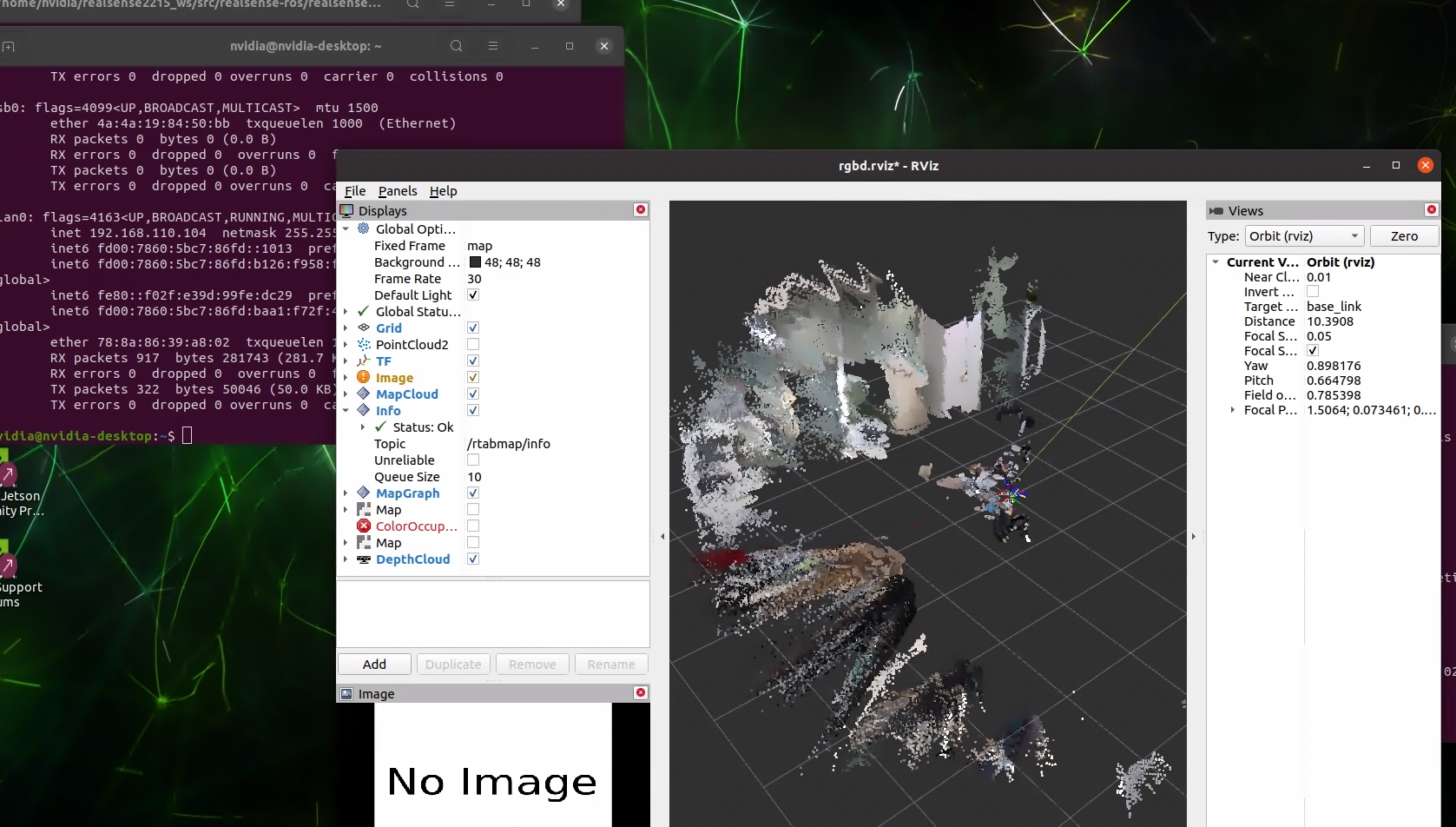
这个确实本质还是rtabmap,可能我之前二进制安装了rtabmap所以这里不用再装了
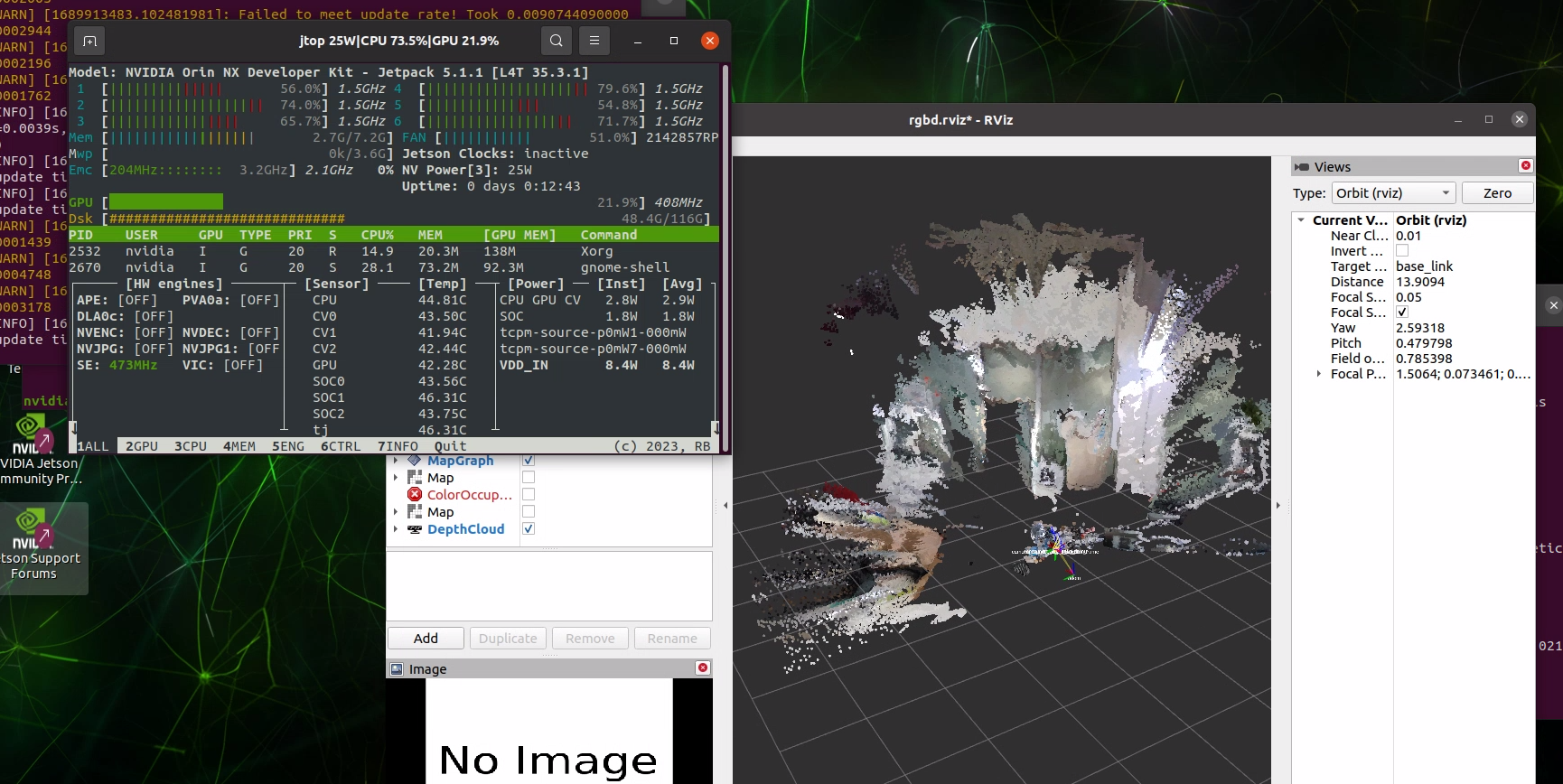
这是在Orin NX上跑opensource_tracking.launch时的CPU占用情况

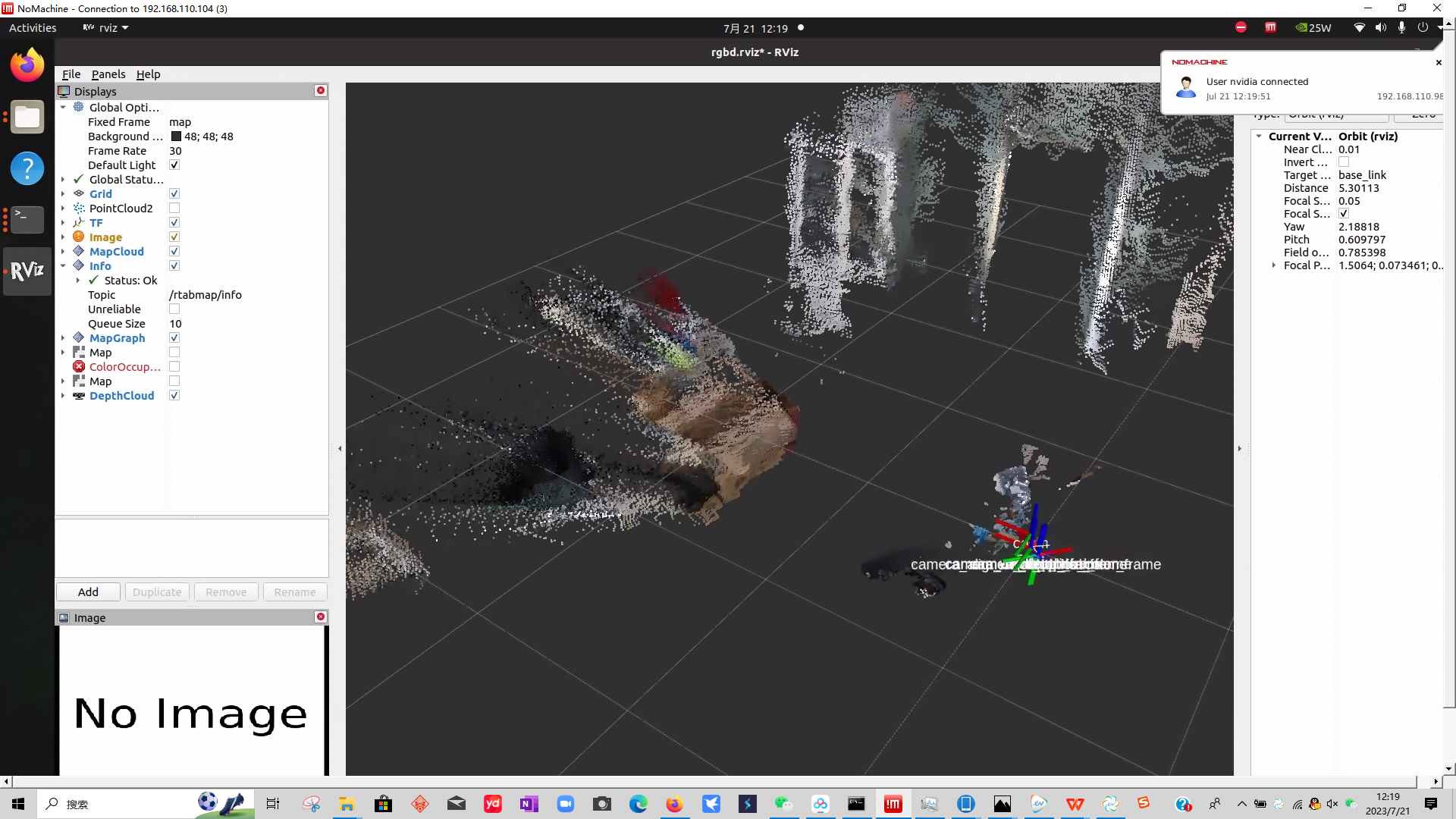
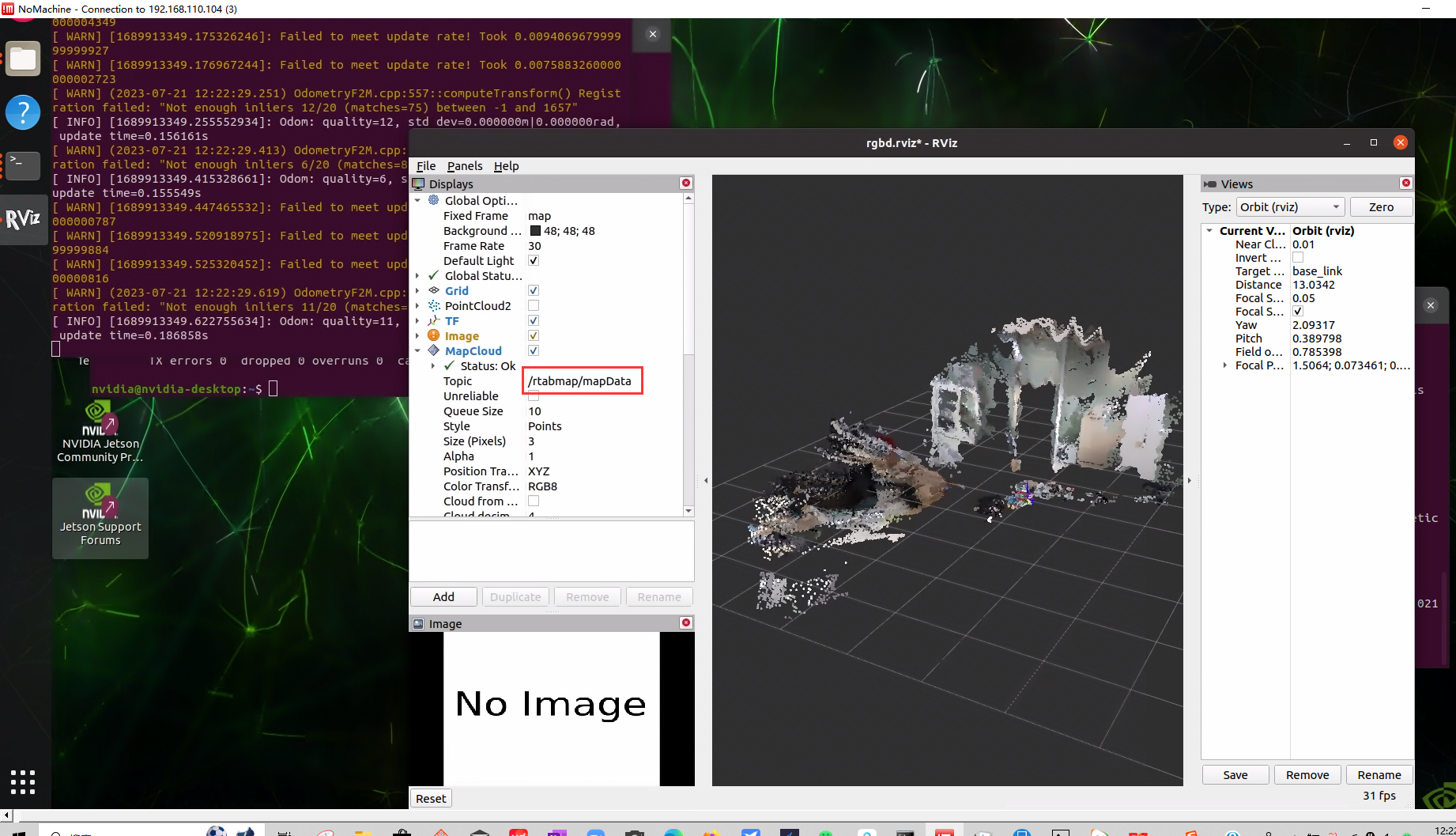
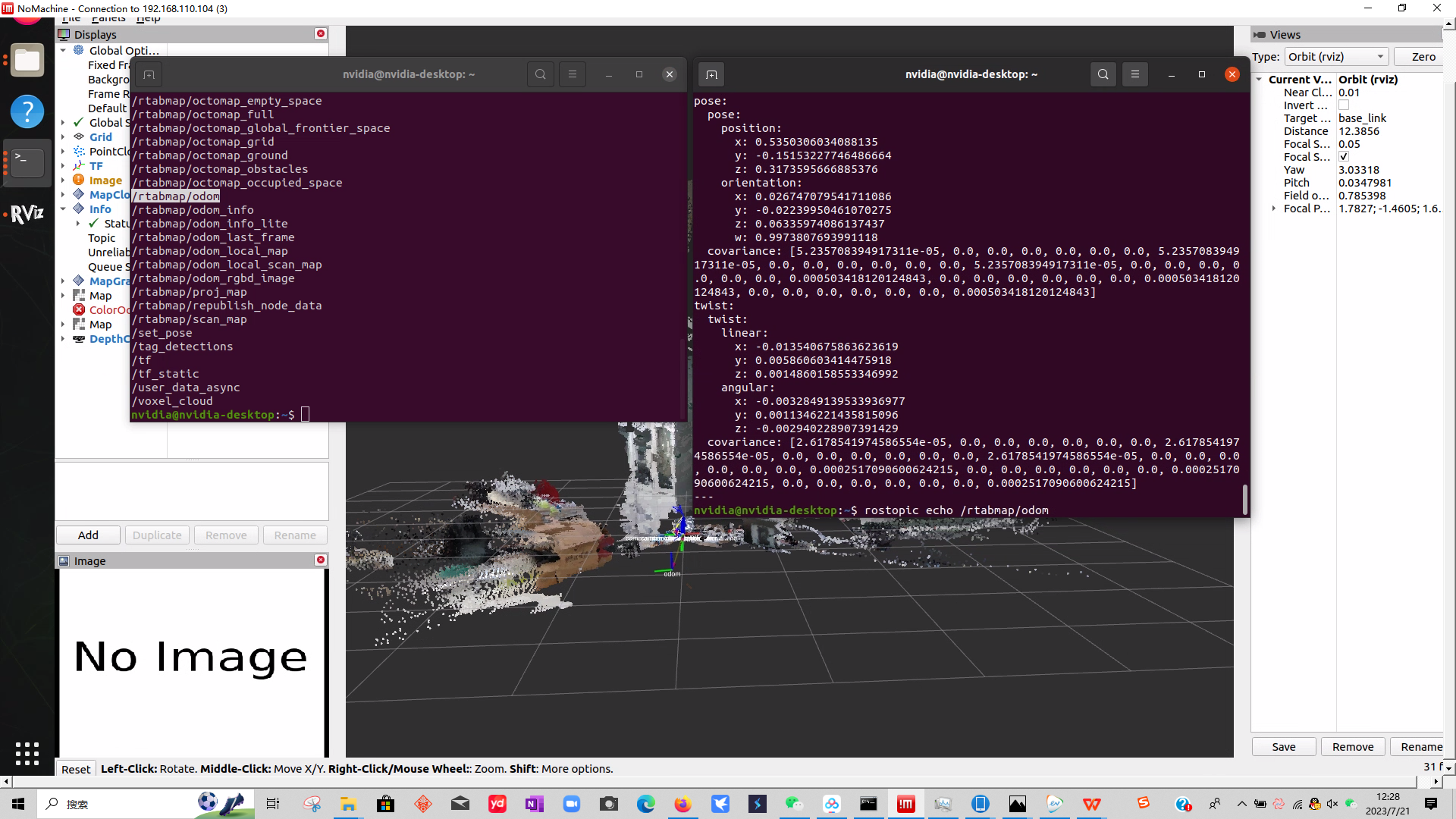
rtabmap是有输出位姿的,还是没有怎么飘或者发散的
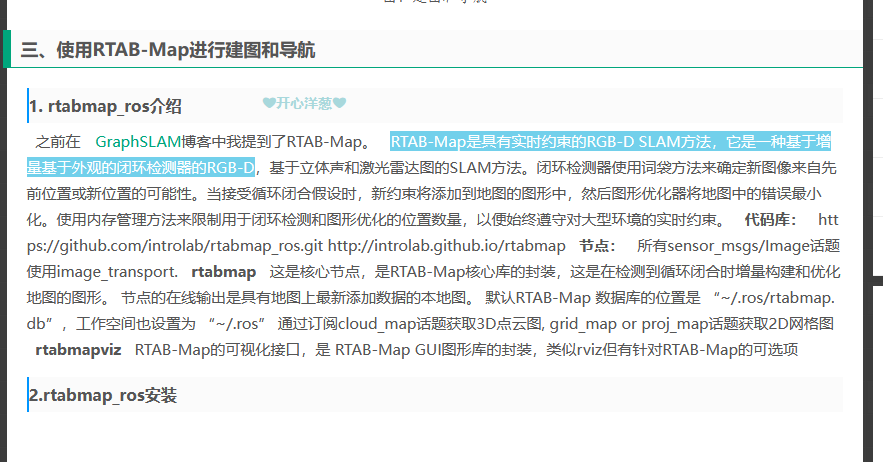
这样不依赖于T265,是真正的rtabmap 看来RTABmap满足增量建图需求,有没有GPU加速的RTABMAP 【SLAM建图和导航仿真实例】(三)- 使用RTAB-MAP进行SLAM建图和导航_人工智能_开心洋葱网
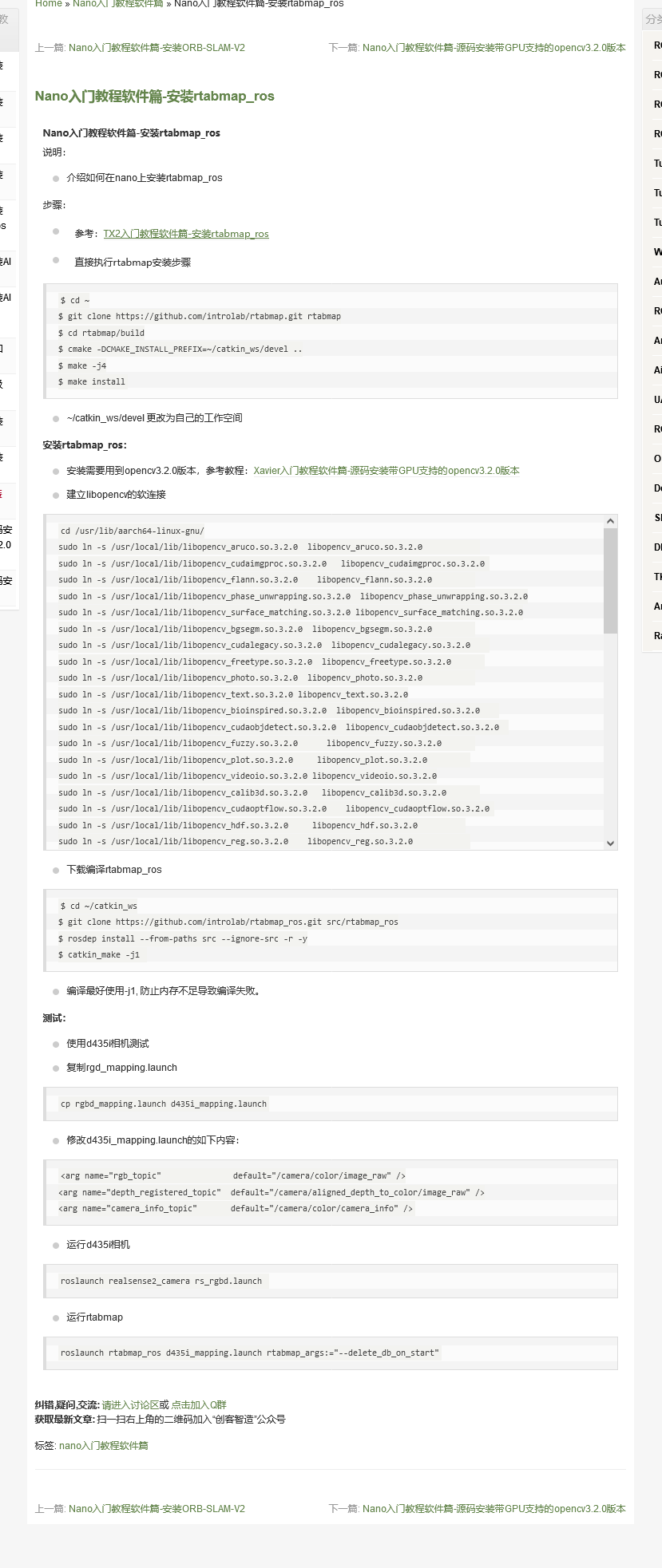
甚至还有在nano上装跑rtabmap的
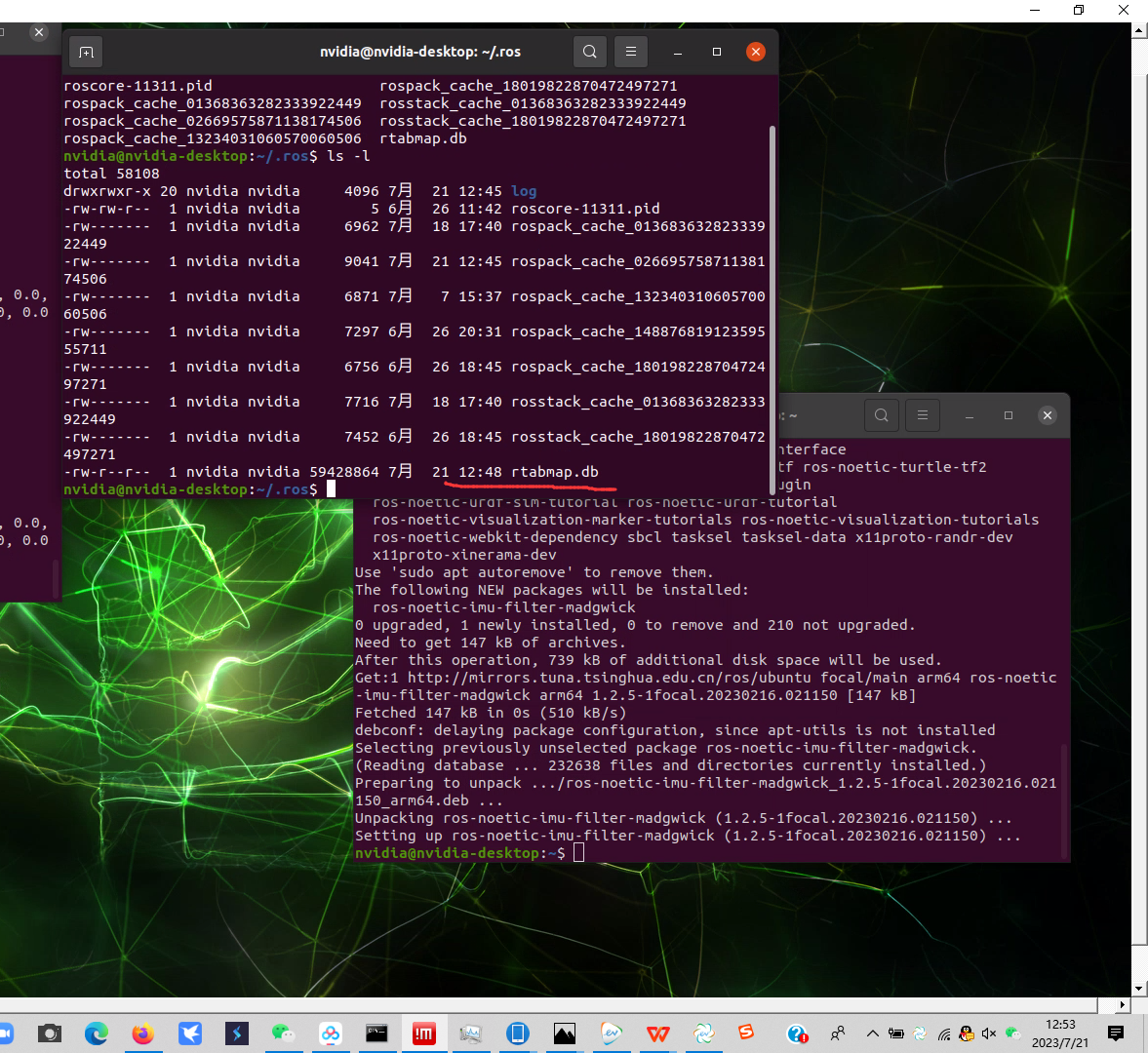
rtabmap地图似乎自动保存到~/.ros/rtabmap.db里面就可以了
我看rtabmap.db里面是是刚创建的。说明确实可以保存


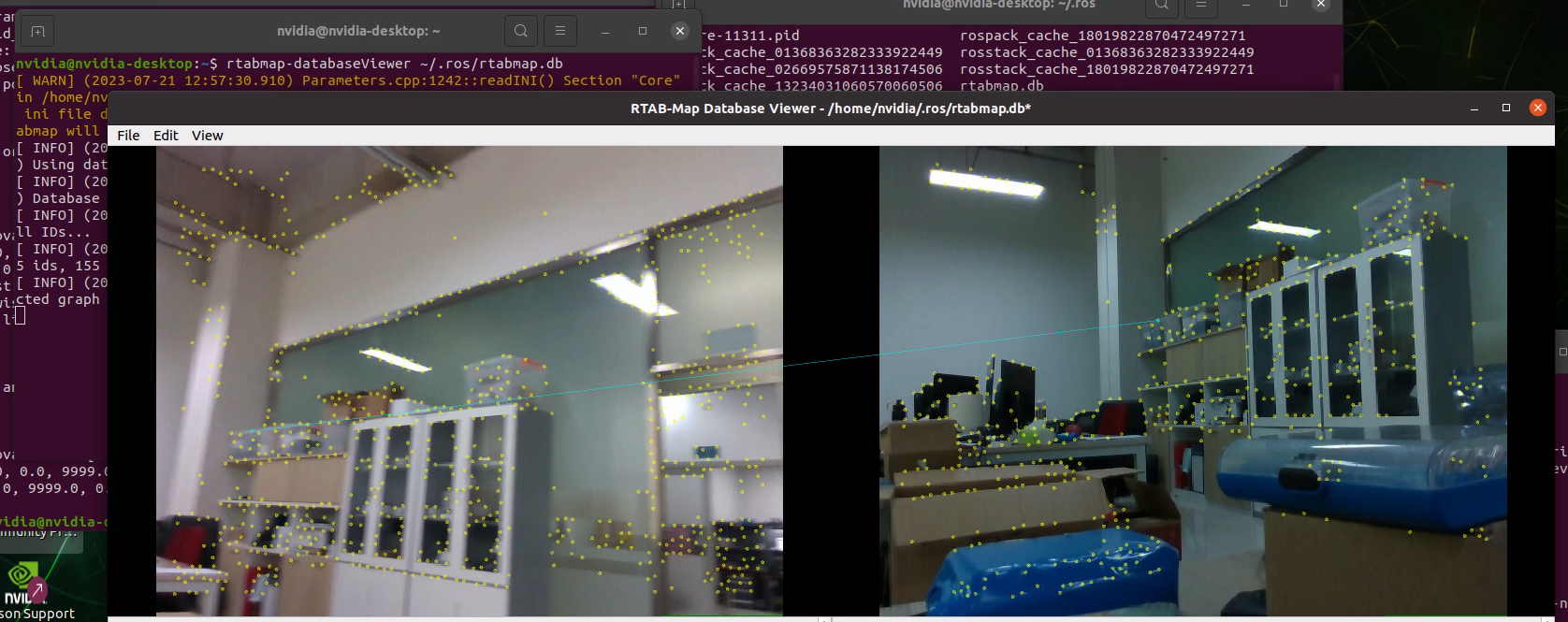
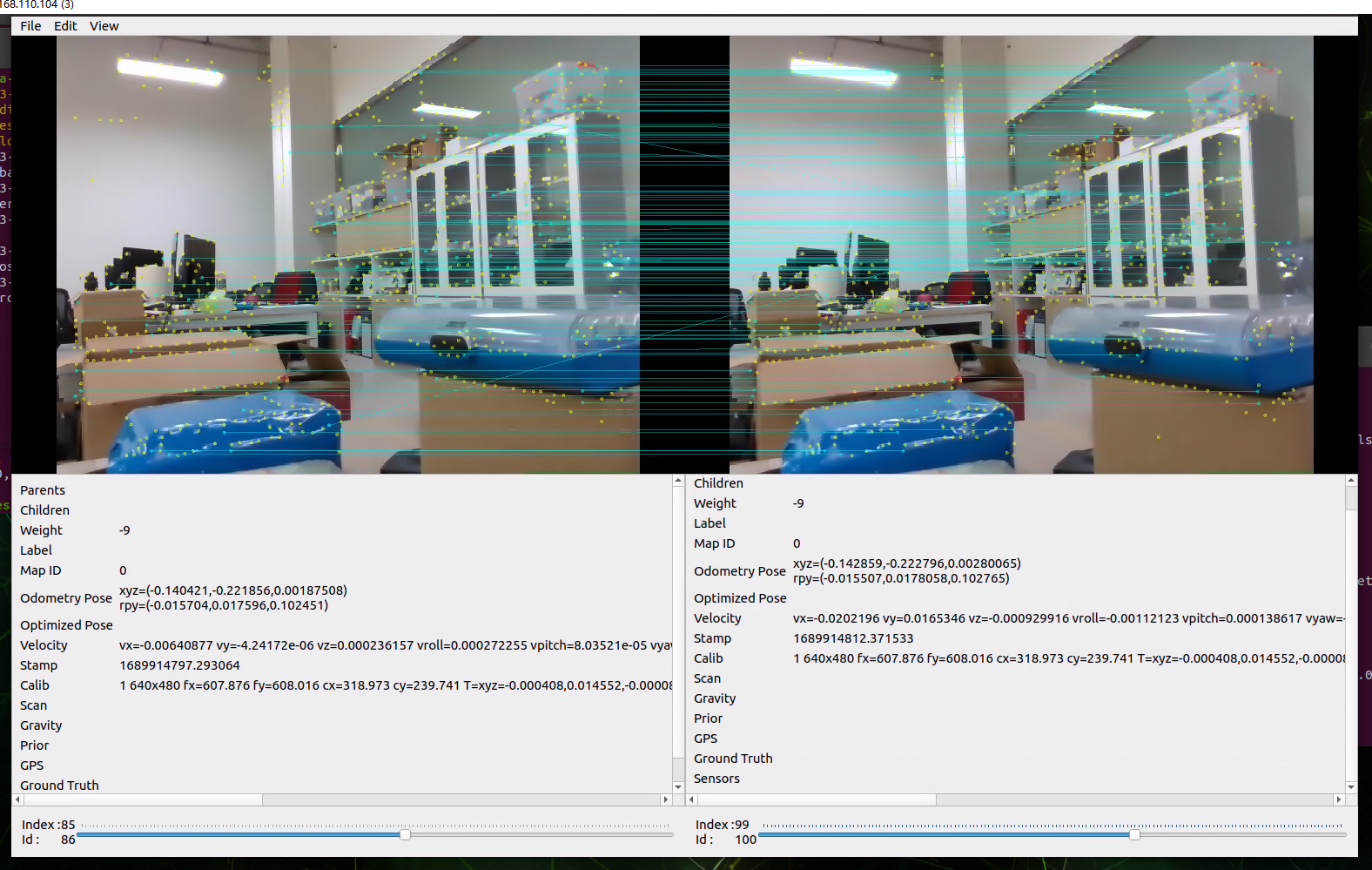
确实可以用rtabmap-databaseViewer ~/.ros/rtabmap.db这个命令查看
时间放长了就卡住了我感觉可能是Orin NX的内存撑不住了。
看这里rtabmap是可以输出八叉树地图的,可以输出二维栅格地图的。进一步说明这些地图是通的。 【在实习期的快乐生活】D435i&Rtabmap&Vins_vins_fusion可以生成2d地图吗-CSDN博客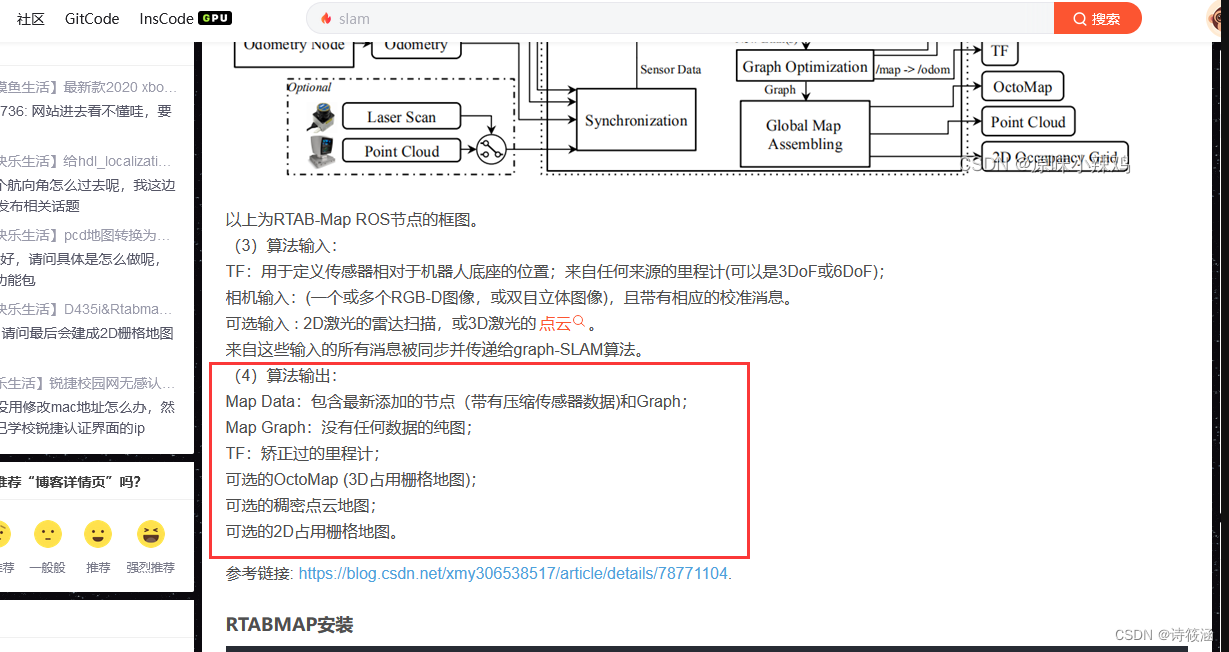


















 2344
2344

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











