







#navigation
1.安装相关依赖
sudo apt-get install ros-kinetic-navigation
sudo apt-get install ros-kinetic-move-base
sudo apt-get install ros-kinetic-amcl
sudo apt-get install ros-kinetic-dwa-local-planner
sudo apt-get install ros-kinetic-teb-local-planner
sudo apt-get install ros-kinetic-navfn ros-kinetic-global-planner
2.创建功能包
cd ros_ws/src
catkin_create_pkg xqrobot_navigation

3.配置rviz
先在xqrobot_navigation功能包里面新建一个名为config的文件夹,用以存放.rviz文件。
cd xqrobot_navigation
mkdir config
(1) 运行主节点roscore:
(2)启动rviz:

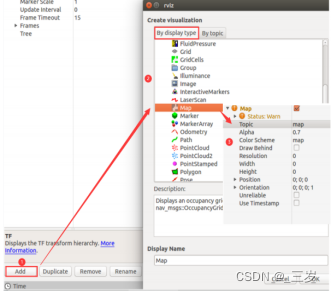
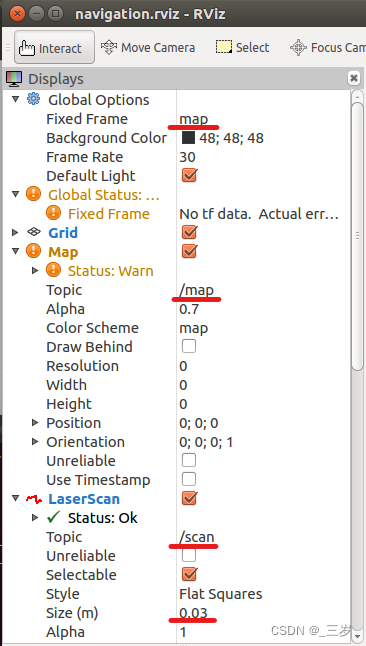
(3)点击“Add”,添加“Map”(topic可先不改)
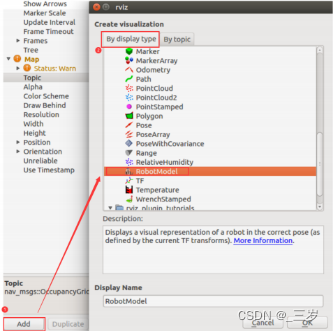
(4)点击“Add”,添加“RobotModel”
(5)点击“Add”,添加“LaserScan”(size改为0.03,topic先不改)
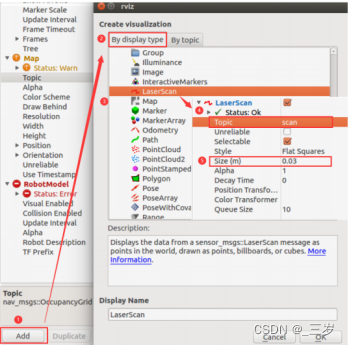
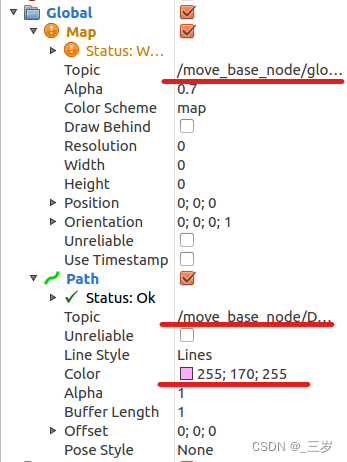
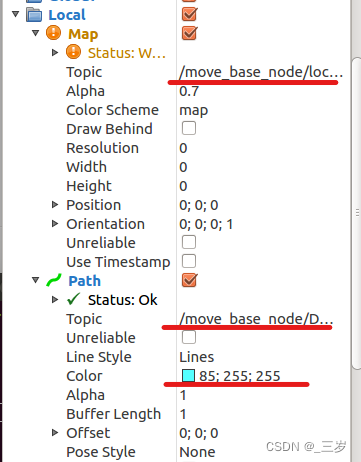
(6)点击“Add”,添加“Group”(添加两个,分别重命名为“Global”、“Local”)、
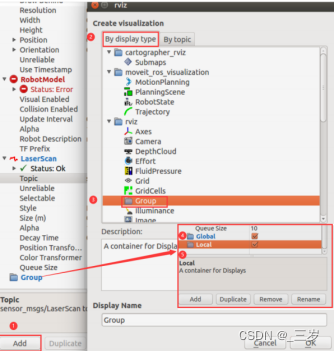
(7)点击“Add”,添加两个“Map”、两个“Path”,鼠标左键按住不动,分别将它们分别拖到“Global”、“Local”中,如下图。(其中一个“Path可以修改颜色,用以区分”)

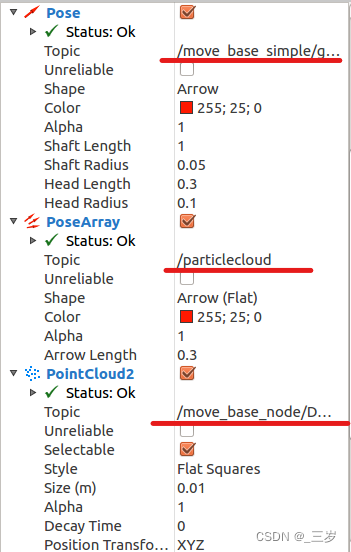
(8)点击“Add”,添加“Pose”、“PointCloud2”、“PoseArry”

(9)将配置好的rviz保存到刚才新建的config文件夹下(在左上角)
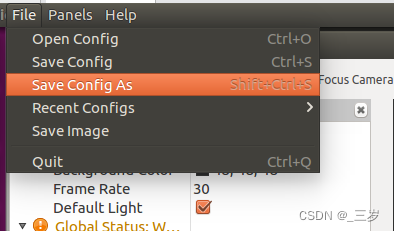
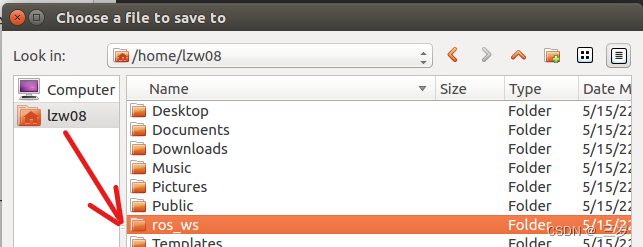
点进去找到config目录保存好就行。
4.创建yaml参数文件
同样需要先在xqrobot_navigation功能包里面新建params文件夹存放下面6个.yaml文件。
新建文件用命令“touch”,打开文件用“gedit”命令。
cd xqrobot_navigation
mkdir params
① navfn 全局路径规划器(navfn_global_planner_params.yaml)
NavfnROS:
visualize_potential: false
allow_unknown: false
planner_window_x: 0.0
planner_window_y: 0.0
default_tolerance: 0.0
②DWA 局部路径规划器(dwa_local_planner_params.yaml)
DWAPlannerROS:
max_vel_x: 0.5 # 0.55
min_vel_x: 0.0
max_vel_y: 0.0
min_vel_y: 0.0
max_trans_vel: 0.5
trans_stopped_vel: 0.2
max_rot_vel: 1.5
min_rot_vel: 0.3
rot_stopped_vel: 0.3
acc_lim_x: 2.0
acc_lim_theta: 3.0
acc_lim_y: 0.0
yaw_goal_tolerance: 0.3
xy_goal_tolerance: 0.15
latch_xy_goal_tolerance: false
sim_time: 1.7
sim_granularity: 0.04
vx_samples: 6
vy_samples: 1
vtheta_samples: 20
path_distance_bias: 30.0
goal_distance_bias: 24.0
occdist_scale: 0.2
forward_point_distance: 0.325
stop_time_buffer: 0.4
scaling_speed: 0.25
max_scaling_factor: 0.2
oscillation_reset_dist: 0.05
controller_frequency: 20.0
# Debugging
publish_cost_grid_pc: true
global_frame_id: odom
③代价地图公有参数配置 (common_costmap_params.yaml)
# Obstacle Cost Shaping (http://wiki.ros.org/costmap_2d/hydro/inflation)
robot_radius: 0.25 # distance a circular robot should be clear of the obstacle
#footprint: [[x0, y0], [x1, y1], ... [xn, yn]] # if the robot is not circular
map_type: voxel
#map_type: costmap
obstacle_layer:
#Global Filtering Parameters
max_obstacle_height: 0.7
obstacle_range: 3.0
raytrace_range: 4.0
#ObstacleCostmapPlugin
track_unknown_space: false
footprint_clearing_enabled: true
#VoxelCostmapPlugin
origin_z: 0 #(double, default: 0.0)
z_resolution: 0.2 #(double, default: 0.2)
z_voxels: 10 #(int, default: 10)
unknown_threshold: 10 #(int, default: ~<name>/z_voxels)
mark_threshold: 0 #(int, default: 0)
publish_voxel_map: false #(bool, default: false)
footprint_clearing_enabled: true #(bool, default: true)
combination_method: 1
enabled: true
#Sensor management parameters
observation_sources: bump scan #ultrasonic
bump:
data_type: PointCloud2
topic: /kinect_camera/depth/points
sensor_frame: kinect_frame_optical
observation_persistence: 0
expected_update_rate: 0.0 #(double, default: 0.0)
marking: true
clearing: true
min_obstacle_height: 0.1
max_obstacle_height: 0.8
obstacle_range: 3.0
raytrace_range: 4.0
inf_is_valid: false
# for debugging only, let's you see the entire voxel grid
scan:
data_type: LaserScan
topic: scan
sensor_frame: laser_rada_Link
observation_persistence: 0
expected_update_rate: 0.0 #(double, default: 0.0)
marking: true
clearing: true
min_obstacle_height: 0.1
max_obstacle_height: 0.8
obstacle_range: 4.0
raytrace_range : 5.0
inf_is_valid: false
#cost_scaling_factor and inflation_radius were now moved to the inflation_layer ns
inflation_layer:
enabled: true
cost_scaling_factor: 5.0 # exponential rate at which the obstacle cost drops off (default: 10)
inflation_radius: 0.3 # max. distance from an obstacle at which costs are incurred for planning paths.
static_layer:
unknown_cost_value: -1
lethal_cost_threshold: 100
map_topic: map
first_map_only: false
subscribe_to_update: false
track_unknown_space: true
use_maximum: false
trinary_costmap: true
enabled: true
④ 全局代价地图参数配置(global_costmap_params.yaml)
global_costmap:
global_frame: /map
robot_base_frame: /base_footprint
update_frequency: 1.0
publish_frequency: 0.5
static_map: true
transform_tolerance: 0.5
plugins:
- {name: static_layer, type: "costmap_2d::StaticLayer"}
- {name: obstacle_layer, type: "costmap_2d::VoxelLayer"}
- {name: inflation_layer, type: "costmap_2d::InflationLayer"}
⑤ 局部代价地图参数配置(local_costmap_params.yaml)
local_costmap:
global_frame: odom
robot_base_frame: /base_footprint
update_frequency: 5.0
publish_frequency: 2.0
static_map: false
rolling_window: true
width: 4.0
height: 4.0
resolution: 0.05
transform_tolerance: 0.5
plugins:
- {name: obstacle_layer,type: "costmap_2d::VoxelLayer"}
- {name: inflation_layer,type: "costmap_2d::InflationLayer"}
⑥ move_base参数配置(move_base_navfn_dwa_params.yaml)
# Move base node parameters. For full documentation of the parameters in this file, please see
shutdown_costmaps: false
controller_frequency: 5.0
controller_patience: 3.0
planner_frequency: 1.0
planner_patience: 5.0
oscillation_timeout: 10.0
oscillation_distance: 0.2
# local planner - default is trajectory rollout
base_local_planner: "dwa_local_planner/DWAPlannerROS"
#alternatives: global_planner/GlobalPlanner, carrot_planner/CarrotPlanner
base_global_planner: "navfn/NavfnROS"
#We plan to integrate recovery behaviors for turtlebot but currently those belong to gopher and still have to be adapted.
## recovery behaviors; we avoid spinning, but we need a fall-back replanning
#recovery_behavior_enabled: true
#recovery_behaviors:
#- name: 'super_conservative_reset1'
#type: 'clear_costmap_recovery/ClearCostmapRecovery'
#- name: 'conservative_reset1'
#type: 'clear_costmap_recovery/ClearCostmapRecovery'
#- name: 'aggressive_reset1'
#type: 'clear_costmap_recovery/ClearCostmapRecovery'
#- name: 'clearing_rotation1'
#type: 'rotate_recovery/RotateRecovery'
#- name: 'super_conservative_reset2'
#type: 'clear_costmap_recovery/ClearCostmapRecovery'
#- name: 'conservative_reset2'
#type: 'clear_costmap_recovery/ClearCostmapRecovery'
#- name: 'aggressive_reset2'
#type: 'clear_costmap_recovery/ClearCostmapRecovery'
#- name: 'clearing_rotation2'
#type: 'rotate_recovery/RotateRecovery'
#super_conservative_reset1:
#reset_distance: 3.0
#conservative_reset1:
#reset_distance: 1.5
#aggressive_reset1:
#reset_distance: 0.0
#super_conservative_reset2:
#reset_distance: 3.0
#conservative_reset2:
#reset_distance: 1.5
#aggressive_reset2:
#reset_distance: 0.0
5.在launch目录中创建.launch文件
同样需要先在xqrobot_navigation功能包下新建launch文件夹存放下面4个.launch文件。
新建文件用命令“touch”,打开文件用“gedit”命令。
① amcl.launch(amcl启动文件)
<launch>
<arg name="use_map_topic" default="false"/>
<arg name="scan_topic" default="/scan"/>
<arg name="initial_pose_x" default="0"/>
<arg name="initial_pose_y" default="0"/>
<arg name="initial_pose_a" default="0"/>
<arg name="odom_frame_id" default="/odom"/>
<arg name="base_frame_id" default="/base_footprint"/> <arg name="global_frame_id" default="/map"/>
<node pkg="amcl" type="amcl" name="amcl">
<param name="use_map_topic" value="$(arg use_map_topic)"/>
<param name="odom_model_type" value="diff"/>
<param name="odom_alpha5" value="0.1"/>
<param name="gui_publish_rate" value="10.0"/>
<param name="laser_max_beams" value="60"/>
<param name="laser_max_range" value="12.0"/>
<param name="min_particles" value="500"/>
<param name="max_particles" value="2000"/>
<param name="kld_err" value="0.05"/>
<param name="kld_z" value="0.99"/>
<param name="odom_alpha1" value="0.04"/>
<param name="odom_alpha2" value="0.6"/>
<!-- translation std dev, m -->
<param name="odom_alpha3" value="0.3"/>
<param name="odom_alpha4" value="0.04"/>
<param name="laser_z_hit" value="0.5"/>
<param name="laser_z_short" value="0.05"/>
<param name="laser_z_max" value="0.05"/>
<param name="laser_z_rand" value="0.5"/>
<param name="laser_sigma_hit" value="0.2"/>
<param name="laser_lambda_short" value="0.1"/>
<param name="laser_model_type" value="likelihood_field"/>
<param name="laser_likelihood_max_dist" value="2.0"/>
<param name="update_min_d" value="0.25"/>
<param name="update_min_a" value="0.2"/>
<param name="odom_frame_id" value="$(arg odom_frame_id)"/>
<param name="base_frame_id" value="$(arg base_frame_id)"/>
<param name="global_frame_id" value="$(arg global_frame_id)"/>
<param name="resample_interval" value="1"/>
<!-- Increase tolerance because the computer can get quite busy -->
<param name="transform_tolerance" value="1.0"/>
<param name="recovery_alpha_slow" value="0.0"/>
<param name="recovery_alpha_fast" value="0.0"/>
<param name="initial_pose_x" value="$(arg initial_pose_x)"/>
<param name="initial_pose_y" value="$(arg initial_pose_y)"/>
<param name="initial_pose_a" value="$(arg initial_pose_a)"/>
<remap from="scan" to="$(arg scan_topic)"/>
<remap from="amcl_pose" to="/amcl_pose"/>
<remap from="particlecloud" to="/particlecloud"/>
</node>
</launch>
② map_server.launch(map_server启动文件)
<launch>
<arg name="map_file" default=" $(find xqrobot_gmapping)/maps/gmapping_sim.yaml"/>
<!-- ****** Maps ***** -->
<node name="map_server" pkg="map_server" type="map_server" args="$(arg
map_file)">
<param name="frame_id" value="/map"/>
</node>
</launch>
③ move_base_navfn_dwa.launch (navfn+dwa版move_base启动文件)
<launch>
<arg name="odom_frame_id" default="/odom"/>
<arg name="base_frame_id" default="/base_footprint"/>
<arg name="global_frame_id" default="/map"/>
<arg name="odom_topic" default="/odom" />
<arg name="laser_topic" default="/scan" />
<node pkg="move_base" type="move_base" respawn="false" name="move_base_node" output="screen">
<rosparam file="$(find xqrobot_navigation)/params/common_costmap_params.yaml" command="load" ns="global_costmap" />
<rosparam file="$(find xqrobot_navigation)/params/common_costmap_params.yaml" command="load" ns="local_costmap" />
<rosparam file="$(find xqrobot_navigation)/params/local_costmap_params.yaml" command="load" />
<rosparam file="$(find xqrobot_navigation)/params/global_costmap_params.yaml" command="load" />
<rosparam file="$(find xqrobot_navigation)/params/dwa_local_planner_params.yaml" command="load" />
<rosparam file="$(find xqrobot_navigation)/params/move_base_navfn_dwa_params.yaml" command="load" />
<rosparam file="$(find xqrobot_navigation)/params/navfn_global_planner_params.yaml" command="load" />
<!-- reset frame_id parameters using user input data -->
<param name="global_costmap/global_frame" value="$(arg global_frame_id)"/>
<param name="global_costmap/robot_base_frame" value="$(arg base_frame_id)"/>
<param name="local_costmap/global_frame" value="$(arg odom_frame_id)"/>
<param name="local_costmap/robot_base_frame" value="$(arg base_frame_id)"/>
<param name="DWAPlannerROS/global_frame_id" value="$(arg odom_frame_id)"/>
<remap from="odom" to="$(arg odom_topic)"/>
<remap from="scan" to="$(arg laser_topic)"/>
<remap from="cmd_vel" to="/cmd_vel"/>
</node>
</launch>
④xqrobot_navigation_navfn_dwa.launch(navfn+dwa版导航总启动文件)
<launch>
<!--gazebo-->
<include file="$(find xqrobot_description)/launch/display_xqrobot_gazebo.launch"/>
<!--map_server-->
<include file="$(find xqrobot_navigation)/launch/map_server.launch"/>
<!--move_base-->
<include file="$(find xqrobot_navigation)/launch/move_base_navfn_dwa.launch"/>
<!--amcl-->
<include file="$(find xqrobot_navigation)/launch/amcl.launch"/>
<!-- **************** Visualisation **************** -->
<node name="rviz" pkg="rviz" type="rviz" args="-d $(find xqrobot_navigation)/config/navigation.rviz"/>
</launch>
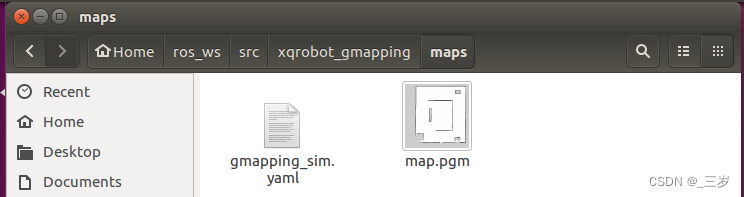
6.maps
将上次Gmapping保存地图时生成的两个文件调整一下位置。
原位置:
新位置:
在xqrobot_gmapping功能包下新建一个名为“maps”的文件夹,然后把map.pgm和“map.yaml”放进去,并将“map.yaml”改名为“gmapping_sim.yaml”。
7.运行仿真结果
(1)安装依赖
sudo apt-get install ros-kinetic-global-planner
sudo apt-get install ros-kinetic-navfn
sudo apt-get install ros-kinetic-dwa-local-planner
sudo apt-get install ros-kinetic-teb-local-planner
(2)编译(catkin_make)
(3)运行
回到工作空间运行以下命令,roslaunch那句注意巧用“Tab”键补齐,补不齐的,可能会报错。
export SVGA_VGPU10=0
source devel/setup.bash
roslaunch xqrobot_navigation xqrobot_navigation_navfn_dwa.launch

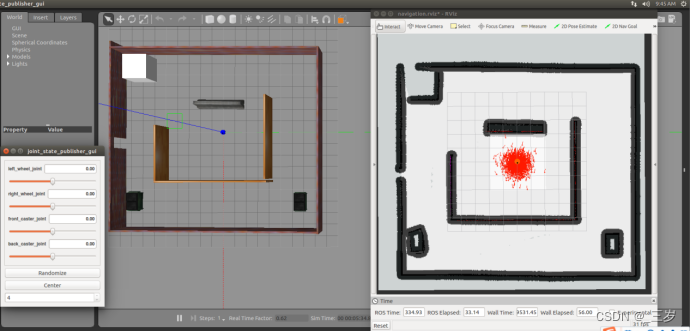
运行起来之后,rviz中的Map、LaserScan等的“topic”可以下拉选择,大概就如下图所示了,出不来就就就,摆烂吧 ~ (上图是经过我缩放、摆正过的,并不是运行roslaunch就能像我的一样!)
8.仿真环境开始自主导航效果
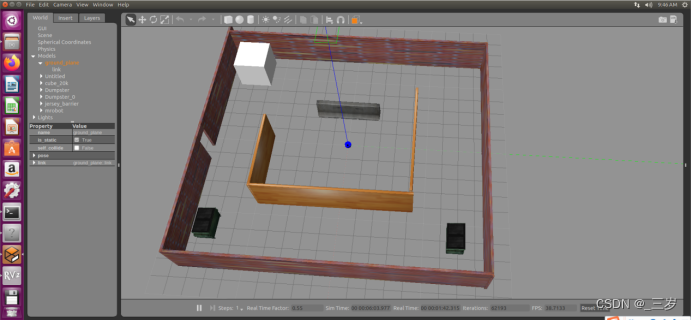
① gazebo物理仿真环境中截图
② rviz可视化界面截图
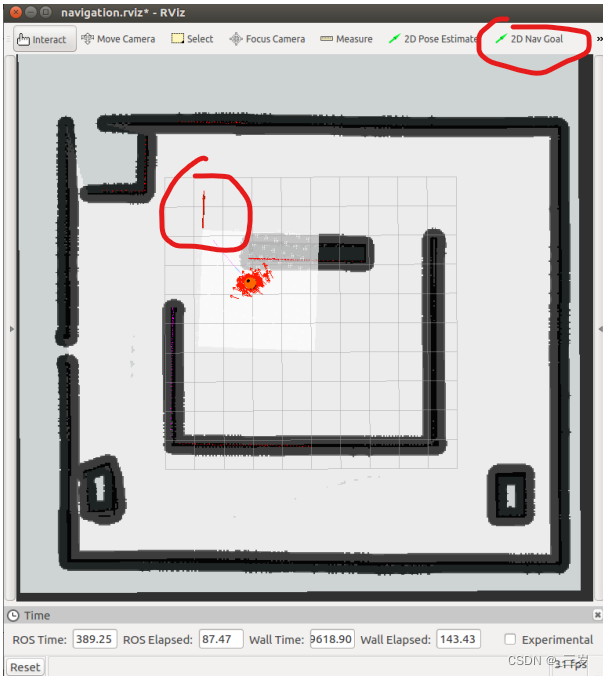
点击“2D Nav Goal”之后画个箭头,机器人就能自动形成轨迹过去了。
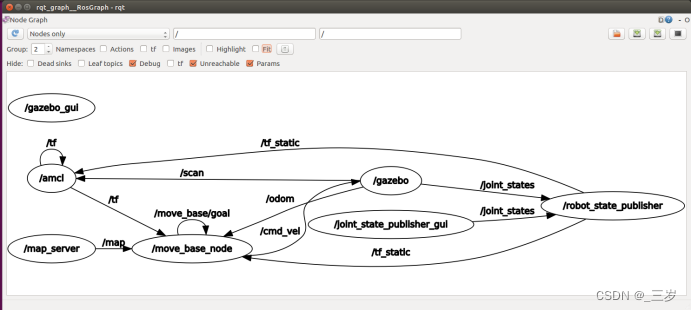
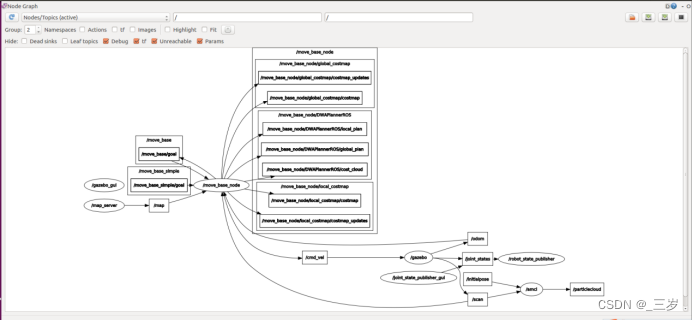
③ 使用QT可视化工具,查看topic之间的关系
9.拜拜 ~
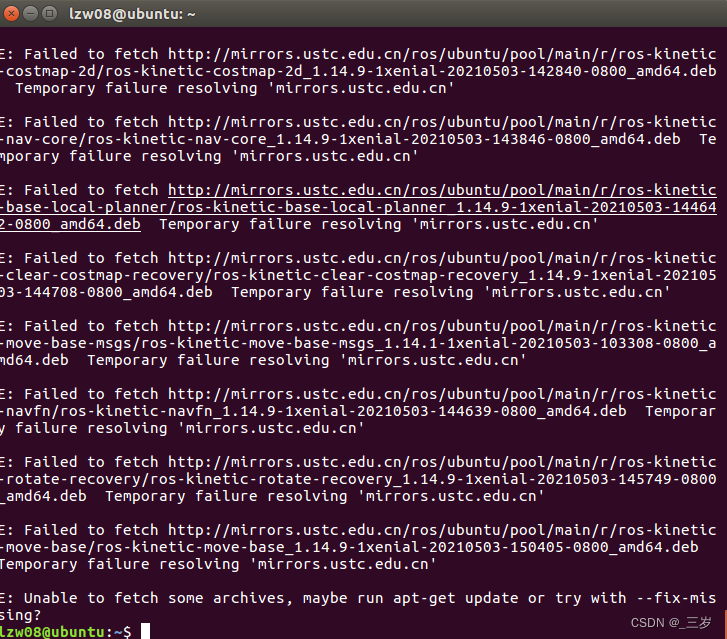
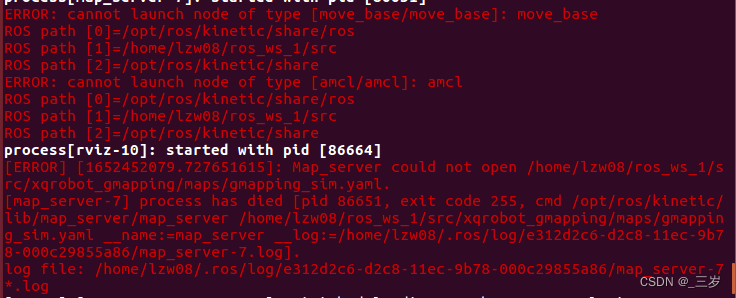
如果遇到以下错误的,不要找我,(因为我也不会)我只能告诉你去重新装虚拟机。第一个是安装不了相关依赖,第二个问题我也看不懂,貌似是move_base和Map_server的问题。除了这两个错误,其他的错误可以私信我。
附:实践报告七(仅供参考,请勿他用!)














 1987
1987











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









