









主要内容
- <font color=blue size=5 face="华文新魏">1、关闭恢复行为Recovery beheviors
- <font color=blue size=5 face="华文新魏">2、hybrid astar全局规划器的使用(ompl库的安装)
- <font color=blue size=5 face="华文新魏">3、自动发送目标点
- <font color=blue size=5 face="华文新魏">4、通过脚本运行多个launch文件
- <font color=blue size=5 face="华文新魏">5、全局路径外扩策略
- <font color=blue size=5 face="华文新魏">6、多控制指令优先级配置
- <font color=blue size=5 face="华文新魏">7、ROS同名功能包的优先级
- <font color=blue size=5 face="华文新魏">8、速度较快时,里程计漂移过大问题
- <font color=blue size=5 face="华文新魏">9、轻舟机器人规划和视觉联合的思路
1、关闭恢复行为Recovery beheviors
当, 全局规划失败(PLANNING_R)、局部规划失败(CONTROLLING_R)、长时间在小区域运动或陷入震荡(OSCILLATION_R )时,Movebase会将当前的状态设置为CLEARING,车速设为为0,进入恢复行为,
在竞速比赛中,当然不希望出现以上行为,因此,可以将恢复行为关掉,在move_base.cpp中搜索以下内容
state_ = CLEARING
会得到3个搜索结果,分别对应以上的三种情况,分别点击该搜索结果,跳转到相关程序段
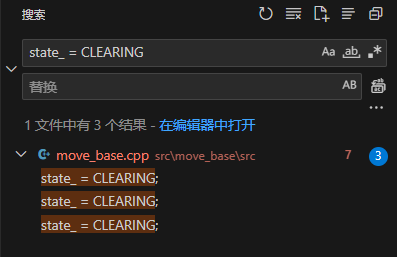
将这三处相关程序注释掉,如下面三幅图所示,然后保存,catkin_make编译后,再规划的时候就会发现没有重规划的信息了,经过我的实际测试,没有再出现过调用重规划的情况。



2、hybrid astar全局规划器的使用(ompl库的安装)
基于混合A*算法的全局路径规划器hybrid_astar_planner,需要用到开源运动规划库ompl,若之前没有装过,编译时则会遇到以下报错:
Make Error at /opt/ros/melodic/share/catkin/cmake/catkinConfig.cmake:83 (find_package):
Could not find a package configuration file provided by “ompl” with any of
the following names:
omplConfig.cmake
ompl-config.cmake
Add the installation prefix of “ompl” to CMAKE_PREFIX_PATH or set
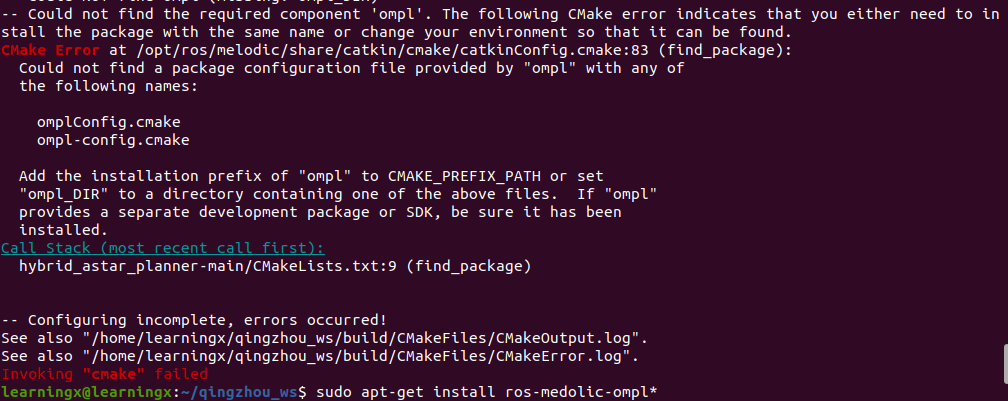
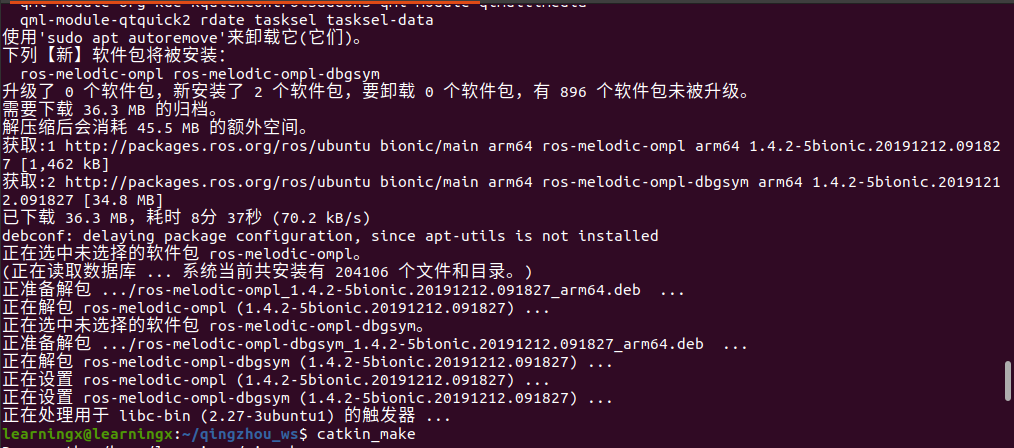
解决方法,可以使用apt的方式进行安装ompl,如下指令所示(其中,melodic是对应的ROS版本,可根据实际情况修改)
sudo apt-get install ros-melodic-ompl*
安装成功后,如下所示
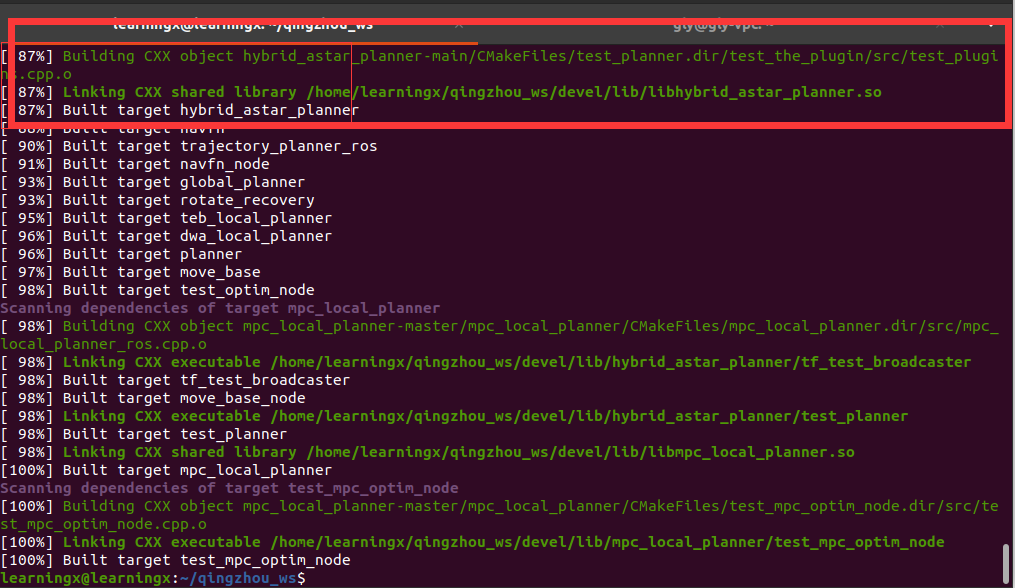
再次编译,即可成功编译,如下所示
如果仅仅使用ompl运动规划库,通过apt的方式安装是没问题,若想阅读源码,或进行修改,则需要使用源码的方式安装:
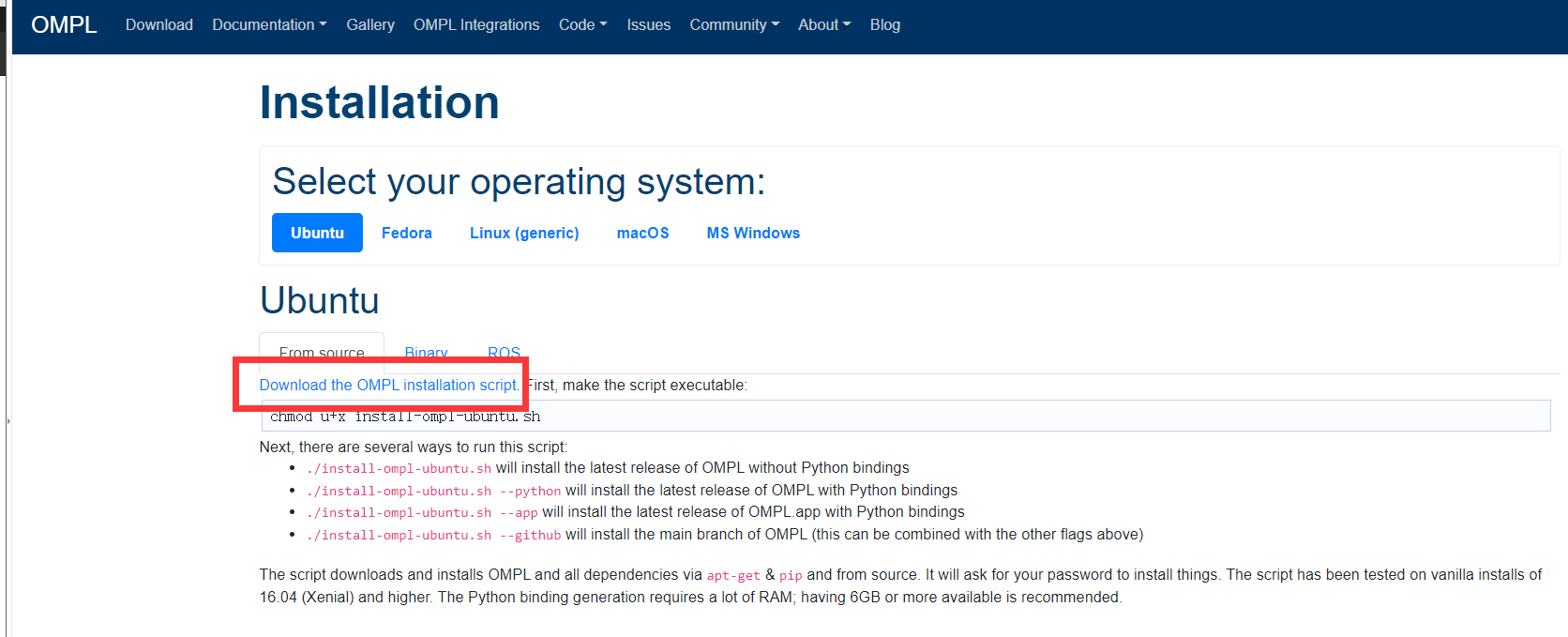
(1)通过以下网址,访问opml的官网,并点击Download the OMPL installation script下载源码包
https://ompl.kavrakilab.org/installation.html
下载完成后,你将获得一个.sh文件,如下所示,
在该目录下,右键打开终端,依次执行如下两条指令,就可以以源码的形式安装完成opml库了,此外,安装目录的/build/Release/bin下有很多生成的demo可执行文件,有兴趣的可以尝试运行使用。
chmod u+x install-ompl-ubuntu.sh
./install-ompl-ubuntu.sh

3、自动发送目标点
4、通过脚本运行多个launch文件
5、全局路径外扩策略
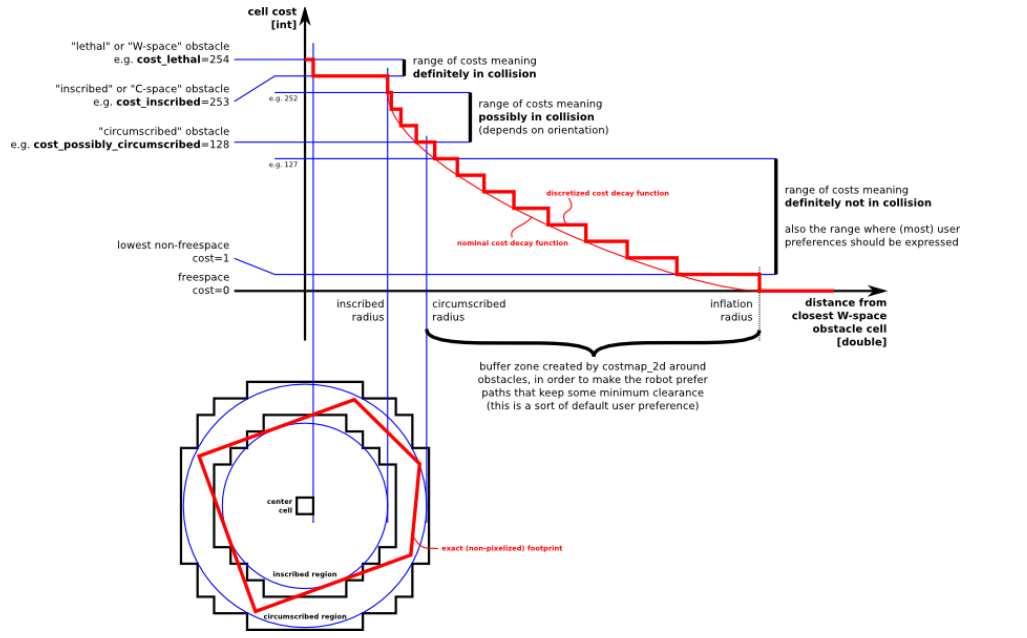
在修改之前,我们必须对Costmap_2D产生的代价地图做一定的了解,使用激光雷达获取的环境地图信息,经过Costmap_2D功能包处理后转化为costmap代价地图。ROS的costmap通常采用grid网格形式。
每个栅格都可以分为三个状态:
(1)Occupied(有障碍,costmap_2d::LETHAL_OBSTACLE=254)
(2)Free ( 无障碍,costmap_2d::FREE_SPACE=0)
(3)Unknown Space(未知区域,costmap_2d::NO_INFORMATION=255)。
所以规划所使用的环境地图的代价costs是由0~255的数字构成的,其中255表示未知区域,254表示致命的障碍,机器人的中心与该栅格的中心重合,机器人已经与障碍物发生了碰撞,253表示栅格中心位于机器人的内切轮廓内,机器人也发生了碰撞。128-252表示,网格中心位于机器人的外切圆与内切圆轮廓之间,此时机器人相当于靠在障碍物附近。0 ~1 27表示网格中心位于机器人外切圆之外,属于没有障碍物的空间。
尽管,costs的取值范围为0~255,但常常仅用Occupied、Free、Unknown Space三种状态来区分
方法一:修改expander.h中的,参数lethal_cost_的默认值,原默认值为253,在A算法进行点的扩展时,会将costs值大于lethal_cost_的栅格视为障碍物,所以可以将该值减小,当A算法在扩展与障碍物较近的点时,将该点也视为障碍物点,直接返回
Expander(PotentialCalculator* p_calc, int nx, int ny) :
unknown_(true), lethal_cost_(253), neutral_cost_(50), factor_(3.0), p_calc_(p_calc) {
setSize(nx, ny);
//障碍物点、未知点,跳过
//lethal_cost_值在expander.h中设置为了253,
if(costs[next_i]>=lethal_cost_ && !(unknown_ && costs[next_i]==costmap_2d::NO_INFORMATION))
return;
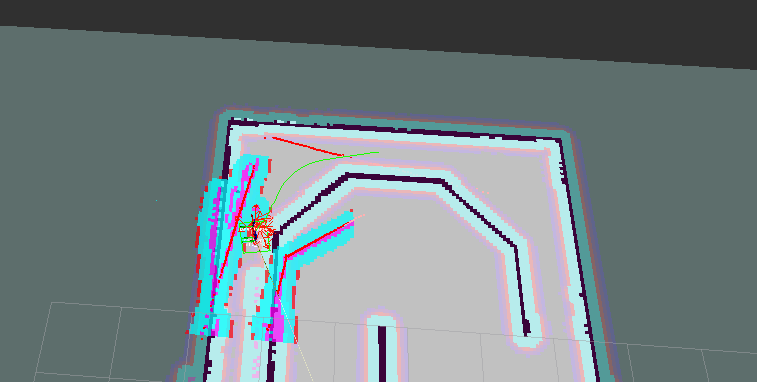
经过理论分析,该方法较简单,但当局部地图漂移严重时(如下图所示),可能会出现找不到可行路径的情况,即当激光雷达的漂移比较大时,可能会导致无可行拓展点,从而找不到可行路径。
方法二: 整体思路,改进A*算法的代价函数,增加与障碍物的距离代价,当栅格离障碍物较近时,给予附加的代价值b(n)。、
比赛赛道的宽度大约是90cm,栅格精度是5cm,在地图不膨胀的情况下,每个方向检查8个栅格左右,即可使得赛道中心位置的代价最小,在global_planner包中将栅格间间距代价neutral_cost_视为50,因此,可以将b(n)取为(Detect_grid_radiu-k_ob+1)*neutral_cost_,其中Detect_grid_radiu是每个方向检测的栅格数,k_ob是在任意方向检测到障碍物时的栅格数,当检测至第Detect_grid_radiu个栅格仍然没有障碍物时,k_ob取Detect_grid_radiu,即此时b(n)=0
b(n)=(Detect_grid_radiu-k_ob+1)*neutral_cost_
//优化点5:计算与障碍物距离的附加代价b(n),使得整体代价值变为 f=g+h+b
int Detect_grid_radiu=20; //朝上下左右四个方向各检查的栅格数量
int neutral_cost_ob=20; //代价扩大系数
int cost_b=0; //附加代价b(n),初始化为0;
for (int check_i=1;check_i<=Detect_grid_radiu;check_i++)
{
if((costs[next_i+check_i]>=lethal_cost_)||(costs[next_i-check_i]>=lethal_cost_)||(costs[next_i+nx_*check_i]>=lethal_cost_)||(costs[next_i-nx_*check_i]>=lethal_cost_))
{
cost_b=(Detect_grid_radiu-check_i+1)*neutral_cost_ob*neutral_cost_;
//ROS_INFO("check_i: %d", check_i);
break;
}
}
//ROS_INFO("check_i test");
//将当前点及其代价f值,放到队列queue_中作为待选点,引入附加代价b(n),使得整体代价值变为 f=g+h+b
queue_.push_back(Index(next_i, potential[next_i] + distance * neutral_cost_ + cost_b));
6、多控制指令优先级配置
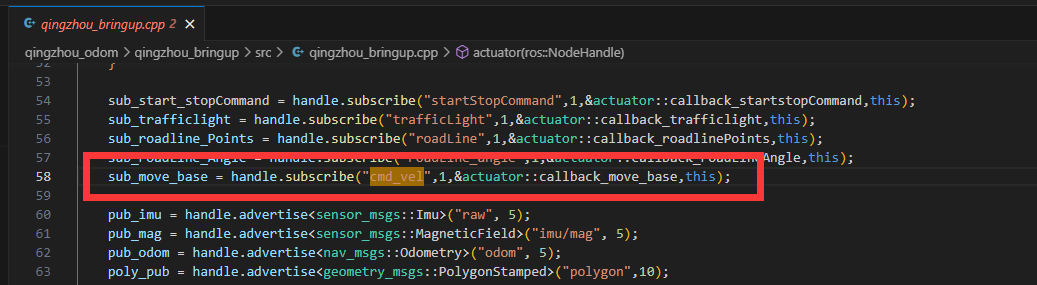
比赛中,我们需要协调来自于多方的控制指令,比如,路径规划发布的控制指令、视觉发布的控制指令、其他算法发布的控制指令等,为其设置优先级,我们需要更改发送给下位机的cmd_vel话题,经过我们设定的优先级选择后,再发布给下位机,因此,我们创建一个新的节点cmd_vel2,它接收各个控制指令,并发出最终的控制指令,将发生给下位机的控制指令话题改为cmd_vel2。
sub_move_base = handle.subscribe("cmd_vel",1,&actuator::callback_move_base,this);
7、ROS同名功能包的优先级
若在不同到的工作空间中,同时存在同名功能包,在执行是会选择优先级最高的那个执行,需要注意的是,优先级与.bashrc文件中设定的顺序是相反的,若.bashrc文件中设定如下:
source /opt/ros/noetic/setup.bash
source /home/gly/catkin_ws/devel/setup.bash
在终端输入以下语句:
echo $ROS_PACKAGE_PATH
终端的输出如下:
/home/gly/catkin_ws/src : /opt/ros/noetic/share
即ROS在寻找某一功能包时会按照上述的目录顺序进行寻找。
8、速度较快时,里程计漂移过大问题
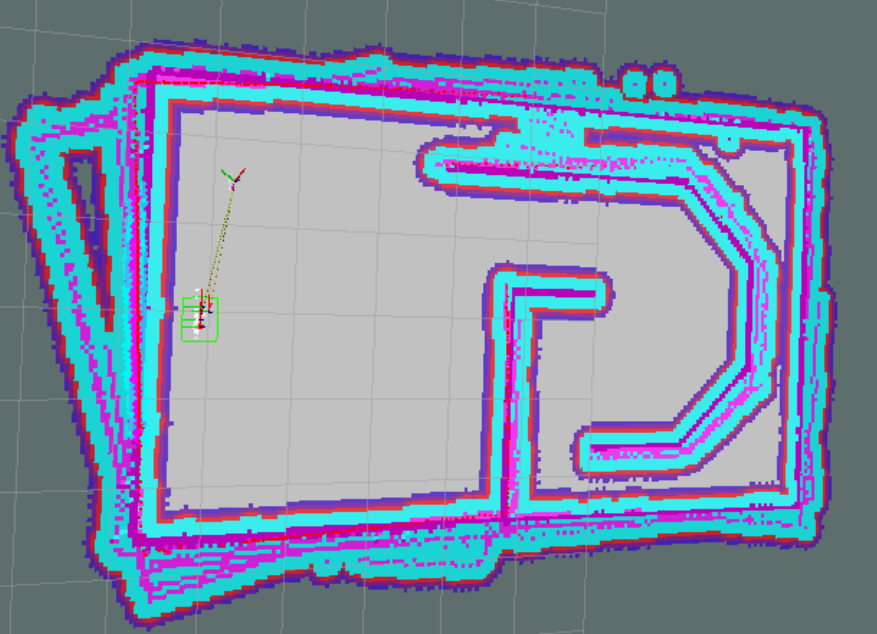
实验场地地面为瓷砖(速度快时易打滑使得里程计误差较大),前进速度设置为大于1m/s,使用遥控器控制机器人从起点处按照比赛路线走一圈后,回到起点后的代价地图为:
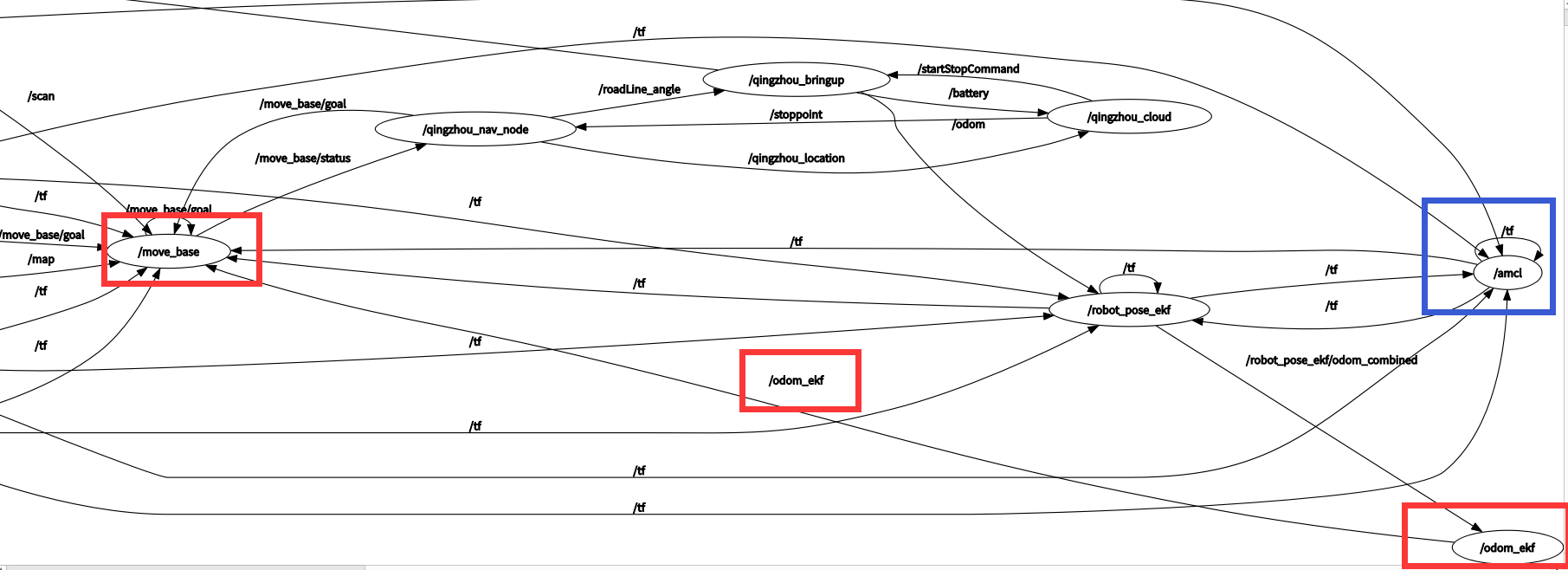
使用rqt_graph可以看出导航使用的定位信息是/odom_ekf,如下图所示(点击或拖拽可查看大图):
此时,/odom_ekf输出的位置信息如下图所示:发现x轴方向已经漂移了1.5m左右,y轴方向漂移了0.69m左右
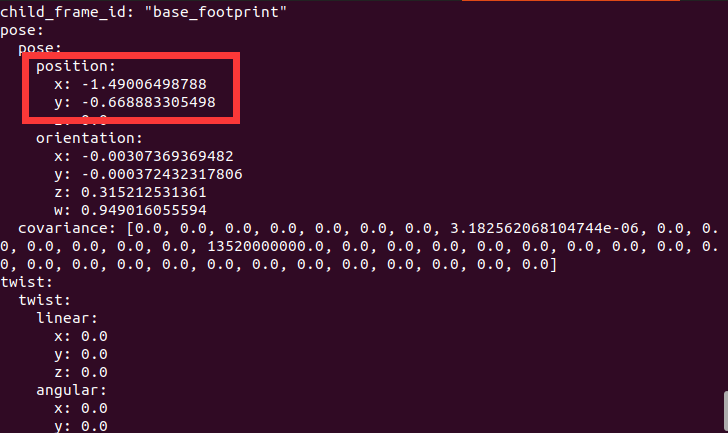
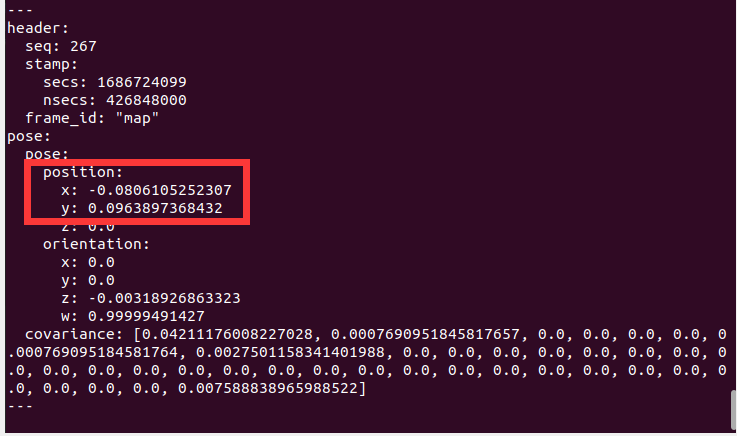
我们再来看一下,尚未使用的amcl输出的amcl_pose输出的信息,x轴和y轴分配漂移0.08m、0.09m,再去除跑完一圈后回到的起点与原起点可能存在较小的差别,可以认为这个漂移是可以接受的。
所以,上述问题的一种解决思路是利用amcl_pose的信息去纠正odom_ekf的信息,amcl_pose的输出频率较低,所以不能直接使用amcl_pose来替代odom_ekf作为定位信息使用,一种较简单的组合思路是,当每获得一次amcl_pose的信息时就对odom_ekf进行一次修正。
9、轻舟机器人规划和视觉联合的思路
(1)红绿灯
视觉部分反馈给出小车当前距离红绿灯的距离和红绿灯的识别颜色,并以话题的形式发布出来,话题名为trafficLight,在qingzhou_bringup节点中会订阅这个话题
sub_trafficlight = handle.subscribe("trafficLight",1,&actuator::callback_trafficlight,this);
并将接收到的数据通过回调函数,存放在currenttrafficlight中
void actuator::callback_trafficlight(const qingzhou_cloud::trafficlight::ConstPtr &msg){
currenttrafficlight = *msg;
//printf("actuator-->trafficlight distanceX = %.2f,distanceY = %.2f,status = %d\n",currenttrafficlight.X,currenttrafficlight.Y,currenttrafficlight.trafficstatus);
}
qingzhou_bringup节点会订阅mov_base调用路径规划发布出的运动控制指令cmd_vel
sub_move_base = handle.subscribe("cmd_vel",1,&actuator::callback_move_base,this);
当接收到数据后,触发回调函数callback_move_base,在该回调函数中会将接收到的cmd_vel的线速度和角度控制指令分别存放在变量v和w中
float v = msg->linear.x;
float w = msg->angular.z;
此时,会进行判断,若之前存储在currenttrafficlight中当前小车与红绿灯的距离在设定的范围内,并且识别的红绿灯颜色为红色,则将v和w均置为0(相当于屏蔽掉了路径规划的控制指令),实现停车,等待红绿灯变为绿灯后,不满足上述条件,不再将v和w置零,按照路径规划发布的速度指令继续前行。
if(currenttrafficlight.X < 1600 && currenttrafficlight.X > 100 && currenttrafficlight.trafficstatus == 2){
printf("actuator-->traffic X=%.2f\n",currenttrafficlight.X);
v = 0;
w = 0;
//currenttrafficlight.trafficstatus = 0;
}
moveBaseControl.TargetSpeed = v*32/0.43;
moveBaseControl.TargetAngle = round(atan(w*CARL/v)*57.3);
moveBaseControl.TargetAngle+=60;
(2)S弯
视觉部分会反馈出当前是否识别到S弯的车道线以及提取出的一些列车道线的中点坐标,并以话题的形式发布出来,话题名为roadLine,qingzhou_nav和qingzhou_bringup这两个节点都会订阅这个话题
//一个订阅器,用于接收道路线信息。
sub_roadlinePoints = nh.subscribe("roadLine",1,&qingzhou_nav::callback_roadlinePoints,this);
都通过回调函数将信息保存在sRoadLinePointMsg中
void actuator::callback_roadlinePoints(const qingzhou_cloud::roadLine::ConstPtr &msg){
sRoadLinePointMsg = *msg;
//printf("actuator --> callback_roadlinePoints,linestatus = %d\n",sRoadLinePointMsg.lineStatus);
}
在qingzhou_nav节点的主循环中会判断sRoadLinePointMsg中存储的是否检测到车道线的标志位信息,若是,则利用sRoadLinePointMsg中储存的一些列车道线的中点坐标,然后使用纯跟踪算法来计算当前期望的舵机转角,并以话题roadLine_angle的形式发布出去,供qingzhou_bringup节点使用。
// 如果检测到道路线状态为0x01,即检测到道路线,调用sLineControl函数计算目标角度,并发布道路线角度和导航状态。
if(sRoadLinePointMsg.lineStatus == 0x01)
{
//printf("success sroad-->linestatus = %d\n",sRoadLinePointMsg.lineStatus);
float tagetAngle = sLineControl();
std_msgs::Float32 currentAngle;
currentAngle.data = tagetAngle;
pub_roadLine_angle.publish(currentAngle);
nav_status.data = 3; //S弯巡线时,导航状态为3
pub_nav_status.publish(nav_status);
continue;
}
pub_roadLine_angle = nh.advertise<std_msgs::Float32>("roadLine_angle", 5 ); //一个发布器,用于发布S弯巡线的期望角度信息,
在qingzhou_bringup节点中,在向下位机传输数据时,会判断sRoadLinePointMsg中存储的是否检测到车道线的标志位,若没有检测到车道线,则将路径规划计算得到的期望线速度和角速度经过转化后的数据,作为控制指令传输给下位机,若检测到车道线,则将订阅得到的qingzhou_nav发布的期望角度经过转换,以及设定的确定速度作为控制指令给下位机。以此,完成规划和识别控制指令的协调。
if(sRoadLinePointMsg.lineStatus == 0)
{
buf[3] = (int)moveBaseControl.TargetAngleDir; // 0-->go straight,0x10-->turn left,0x20-->turn right
buf[4] = (int)abs(moveBaseControl.TargetAngle); //targetangle 180-->0xb4
buf[5] = (int)abs(moveBaseControl.TargetSpeed); //targetSpeed
buf[6] = (int)moveBaseControl.TargetModeSelect; //0-->person control,1-->auto control
buf[7] = (int)moveBaseControl.TargetShiftPosition; //0-->P stop;1-->R;2-->D.期望档位 停止/倒车/前进
}
else if(sRoadLinePointMsg.lineStatus == 1)
{
if(currentAngleMsg.data > 59){
currentAngleMsg.data = 59;
}
if(currentAngleMsg.data < -59){
currentAngleMsg.data = -59;
}
buf[3] = 0x10; //与视觉程序对应
buf[4] = currentAngleMsg.data + 60; //期望转角+60
buf[5] = 0.18*32/0.43; //线速度
buf[6] = 1; //自动模式
buf[7] = 2; //前进
}
上述程序中的currentAngleMsg来源于上面提到的qingzhou_nav发布的roadLine_angle。
sub_roadLine_Angle = handle.subscribe("roadLine_angle",1,&actuator::callback_roadLineAngle,this);
void actuator::callback_roadLineAngle(const std_msgs::Float32::ConstPtr &msg){
currentAngleMsg = *msg;
}
(3)坡道
(4)倒车入库
注:这篇博客是去年6月份写的,本来想比赛完后,发出来,结果忘了…,还有两部分没写,尴尬是这个比赛没了…就不写了。。。。今天整理草稿箱,发现了这篇文章,正好今天是在CSDN创作四周年,正好我做智能车大概也有四年的时间。。所以还是把他发出来吧,纪念一下智能车生涯。


















 1664
1664

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











